

dynamical synthesis of oscillating system mass-spring-magnet
dynamical synthesis of oscillating system mass-spring-magnet
dynamical synthesis of oscillating system mass-spring-magnet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
DYNAMICAL SYNTHESIS OF OSCILLATING SYSTEM<br />
MASS-SPRING-MAGNET<br />
Rumen NIKOLOV, Todor TODOROV<br />
Technical University <strong>of</strong> S<strong>of</strong>ia, Bulgaria<br />
Abstract. On the basis <strong>of</strong> a qualitative analysis <strong>of</strong> nonlinear differential equation, which describes the behavior <strong>of</strong> the<br />
<strong>oscillating</strong> <strong>system</strong> <strong>mass</strong>-<strong>spring</strong>-<strong>magnet</strong>, a <strong>dynamical</strong> <strong>synthesis</strong> is performed. The <strong>magnet</strong>ic force is obtained using the<br />
finite element method and approximated by an analytical expression. The parameters <strong>of</strong> the <strong>system</strong> which ensure<br />
periodical oscillations with given properties are determined.<br />
Keywords: nonlinear dynamics, qualitative analysis, phase portrait, separatrix, <strong>magnet</strong>ic force, FEM<br />
1. Introduction<br />
The tasks <strong>of</strong> <strong>dynamical</strong> <strong>synthesis</strong> <strong>of</strong> mechanical<br />
<strong>system</strong>s come down to determining <strong>of</strong> <strong>mass</strong> and<br />
force parameters depending on preliminarily<br />
described manner <strong>of</strong> behavior. For example, in the<br />
Theory <strong>of</strong> Mechanisms and Machines a typical<br />
problem <strong>of</strong> such a kind is the finding <strong>of</strong> the moment<br />
<strong>of</strong> inertia <strong>of</strong> a flywheel, which ensures a given<br />
irregularity <strong>of</strong> motion [1]. Tasks <strong>of</strong> the same type<br />
concern the time-response or the durability <strong>of</strong><br />
transient states [2, 3].<br />
Magneto-mechanical <strong>system</strong>s are with<br />
sophisticated characteristics and the description <strong>of</strong><br />
their behavior is based on solving <strong>of</strong> nonlinear<br />
ODEs [4, 5], and in the general case it relates to<br />
investigation <strong>of</strong> complicated <strong>dynamical</strong> processes<br />
which are described by PDEs [6]. The choice <strong>of</strong> the<br />
parameters <strong>of</strong> such a <strong>system</strong> also can be added to<br />
the tasks <strong>of</strong> the <strong>dynamical</strong> <strong>synthesis</strong>, as far as such a<br />
choice can guarantee some requested properties <strong>of</strong><br />
the real <strong>system</strong>.<br />
At the present paper a nonlinear <strong>oscillating</strong><br />
<strong>system</strong> <strong>of</strong> the type <strong>mass</strong>-<strong>spring</strong>-<strong>magnet</strong> is<br />
investigated. On the basis <strong>of</strong> a qualitative analysis a<br />
method for achieving <strong>of</strong> given parameters <strong>of</strong> the<br />
oscillations is proposed.<br />
2. Magnetic force determination<br />
The basic elements <strong>of</strong> the <strong>system</strong> are shown in<br />
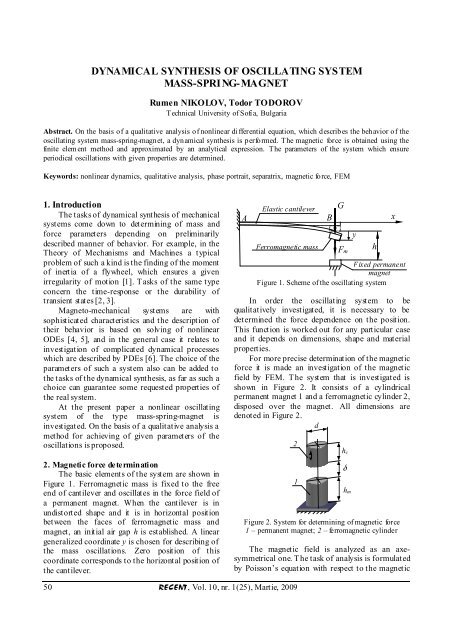
Figure 1. Ferro<strong>magnet</strong>ic <strong>mass</strong> is fixed to the free<br />
end <strong>of</strong> cantilever and oscillates in the force field <strong>of</strong><br />
a permanent <strong>magnet</strong>. When the cantilever is in<br />
undistorted shape and it is in horizontal position<br />
between the faces <strong>of</strong> ferro<strong>magnet</strong>ic <strong>mass</strong> and<br />
<strong>magnet</strong>, an initial air gap h is established. A linear<br />
generalized coordinate y is chosen for describing <strong>of</strong><br />
the <strong>mass</strong> oscillations. Zero position <strong>of</strong> this<br />
coordinate corresponds to the horizontal position <strong>of</strong><br />
the cantilever.<br />
A<br />
Elastic cantilever<br />
Ferro<strong>magnet</strong>ic <strong>mass</strong><br />
B<br />
G<br />
F m<br />
Fixed permanent<br />
<strong>magnet</strong><br />
Figure 1. Scheme <strong>of</strong> the <strong>oscillating</strong> <strong>system</strong><br />
In order the <strong>oscillating</strong> <strong>system</strong> to be<br />
qualitatively investigated, it is necessary to be<br />
determined the force dependence on the position.<br />
This function is worked out for any particular case<br />
and it depends on dimensions, shape and material<br />
properties.<br />
For more precise determination <strong>of</strong> the <strong>magnet</strong>ic<br />
force it is made an investigation <strong>of</strong> the <strong>magnet</strong>ic<br />
field by FEM. The <strong>system</strong> that is investigated is<br />
shown in Figure 2. It consists <strong>of</strong> a cylindrical<br />
permanent <strong>magnet</strong> 1 and a ferro<strong>magnet</strong>ic cylinder 2,<br />
disposed over the <strong>magnet</strong>. All dimensions are<br />
denoted in Figure 2.<br />
d<br />
2<br />
1<br />
Figure 2. System for determining <strong>of</strong> <strong>magnet</strong>ic force<br />
1 – permanent <strong>magnet</strong>; 2 – ferro<strong>magnet</strong>ic cylinder<br />
The <strong>magnet</strong>ic field is analyzed as an axesymmetrical<br />
one. The task <strong>of</strong> analysis is formulated<br />
by Poisson’s equation with respect to the <strong>magnet</strong>ic<br />
h c<br />
δ<br />
h m<br />
y<br />
h<br />
x<br />
50 RECENT, Vol. 10, nr. 1(25), Martie, 2009
Dynamical Synthesis <strong>of</strong> Oscillating System Mass-Spring-Magnet<br />
vector-potential in the cylindrical coordinate<br />
<strong>system</strong>. The investigated area is determined as<br />
sufficient large buffer zone (<strong>of</strong> the order <strong>of</strong><br />
20-multiple dimension <strong>of</strong> the <strong>system</strong>) at the<br />
boundary <strong>of</strong> which they are imposed homogenous<br />
boundary conditions <strong>of</strong> Dirichlet.<br />
The problem is solved with the help <strong>of</strong> the<br />
s<strong>of</strong>tware product FEMM (Finite Element Method<br />
Magnetics), and for automation <strong>of</strong> the calculations<br />
some programs in the Lua Script ® language are<br />
created. For determining <strong>of</strong> the <strong>magnet</strong>ic force the<br />
built in tension tensor <strong>of</strong> Maxwell is used. The<br />
number <strong>of</strong> mesh nodes <strong>of</strong> the finite elements varies<br />
for the different tasks between 18,000 and 20,000.<br />
Investigations are made for two types <strong>of</strong><br />
permanent <strong>magnet</strong>s (BaFerrite and NDFeB) and two<br />
dimensions <strong>of</strong> the diameters (8 and 13 mm). Results<br />
for the <strong>magnet</strong>ic field distribution and for the<br />
attractive force between <strong>magnet</strong> and ferro<strong>magnet</strong>ic<br />
cylinder are obtained when the air gap changes from<br />
1 to 5 mm.<br />
Magnetic field lines for diameter 8 mm and<br />
permanent BaFerrite for air gaps 1 and 5 mm are<br />
visualized in Figures 3a and 3b. For the same<br />
dimensions an investigation is made for the<br />
permanent <strong>magnet</strong> NdFeB. Results for the <strong>magnet</strong>ic<br />
field distribution are given in Figure 3c.<br />
As a consequence, there is no a principle<br />
difference in the distribution field patterns <strong>of</strong> both<br />
types <strong>of</strong> <strong>magnet</strong>s. However the difference in terms<br />
<strong>of</strong> force is significant, which can be observed in<br />
Table 1. For the <strong>magnet</strong> <strong>of</strong> NdFeB the mean<br />
<strong>magnet</strong>ic force is more <strong>of</strong> 60 times bigger than the<br />
same force in the <strong>system</strong> <strong>of</strong> BaFerrite.<br />
Table 1. Force variation<br />
Force [N]<br />
δ [mm]<br />
BaFerrite NdFeB BaFerrite<br />
8/15/10 8/15/10 13/8/5<br />
1 0.121 8.50 0.209<br />
1.5 0.091 5.92 0.158<br />
2 0.065 4.13 0.118<br />
2.5 0.046 2.95 0.089<br />
3 0.033 2.17 0.068<br />
3.5 0.026 1.63 0.053<br />
4 0.019 1.20 0.041<br />
4.5 0.014 0.90 0.033<br />
5 0.011 0.70 0.026<br />
The obtained force data are approximated by<br />
the relation<br />
κ<br />
F m =<br />
( δ0 + δ) 2<br />
(1)<br />
which is close to Coulomb’s low [7] when δ 0 is<br />
small. Analogically to this law here κ is denoted as<br />
an imaginary <strong>magnet</strong>ic <strong>mass</strong>, δ 0 is an imaginary<br />
initial gap. The constant values and maximal<br />
deviations are shown in Table 2. The graphs <strong>of</strong> the<br />
approximating functions are presented in Figure 4.<br />
c)<br />
Figure 3. Magnetic field lines distribution for δ = 1 mm<br />
and δ = 5 mm<br />
а) NdFeB d = 8 mm; h m = 15 mm; h c = 10 mm;<br />
b) BaFerrite d = 8 mm; h m = 15 mm; h c = 10 mm;<br />
c) BaFerrite d = 13 mm; h m = 8 mm; h c = 5 mm<br />
Table 2. Constant values and maximal deviations<br />
Material<br />
Max.<br />
dimensions κ<br />
deviation<br />
d / h m / h c ×10 -7 [N·m 2 ] δ 0 [m] ×10 -6 [N]<br />
BaFerrite<br />
6.2681702 0.0012348 0.00086<br />
8/15/10<br />
NdFeB<br />
35.921246 0.0010328 0.207×10 -6<br />
8/15/10<br />
BaFerrite<br />
1.4354750 0.0015858 0.000124<br />
13/8/5<br />
3. Dynamical model <strong>of</strong> the <strong>oscillating</strong> <strong>system</strong><br />
A mathematical model <strong>of</strong> the beam is created,<br />
taking in account the following more important<br />
simplified assumptions: all kinds <strong>of</strong> resistance are<br />
neglected; the influence <strong>of</strong> the distributions <strong>of</strong> all<br />
kind <strong>of</strong> loads is neglected, it is assumed that the<br />
<strong>mass</strong> moves rectilinearly and its rotation is ignored.<br />
RECENT, Vol. 10, no. 1(25), March, 2009 51<br />
a)<br />
b)
F m<br />
[N]<br />
F m<br />
[N]<br />
F m<br />
[N]<br />
Dynamical Synthesis <strong>of</strong> Oscillating System Mass-Spring-Magnet<br />
[mm]<br />
[mm]<br />
[mm]<br />
c)<br />
Figure 4. Approximated static characteristics <strong>of</strong><br />
investigated cases: а) <strong>magnet</strong> BaFerrite and dimensions<br />
d = 8 mm; h m = 15 mm; h c = 10 mm; b) <strong>magnet</strong> NdFeB<br />
and dimensions d = 8 mm; h m = 15 mm; h c = 5 mm;<br />
c) <strong>magnet</strong> BaFerrite d = 13 mm; and dimensions h m = 8<br />
mm; h c = 5 mm<br />
According to Figure 1 for <strong>magnet</strong>ic force (1) it<br />
is yield<br />
κ<br />
F m =<br />
( δ0 + h − y) 2<br />
(2)<br />
because δ = h – y. On the <strong>mass</strong> it exerts influence<br />
the elastic force <strong>of</strong> the cantilever<br />
F e = −c⋅<br />
y<br />
(3)<br />
and the weight<br />
G = m·g, (4)<br />
where c is the <strong>spring</strong> stiffness, m is the <strong>mass</strong>, and g<br />
is the gravity acceleration.<br />
The motion <strong>of</strong> the <strong>mass</strong> in the free cantilever<br />
end is described by the differential equation<br />
κ<br />
m ⋅ y& + c ⋅ y = m⋅<br />
g +<br />
(5)<br />
( δ0<br />
+ h − y)<br />
which after dividing to m takes the view<br />
κ<br />
& y&<br />
2<br />
+ k ⋅ y = g +<br />
(6)<br />
m( δ0<br />
+ h − y)<br />
52 RECENT, Vol. 10, nr. 1(25), Martie, 2009<br />
a)<br />
b)<br />
where k is the natural frequency <strong>of</strong> the <strong>system</strong>. For<br />
the stroke constrains <strong>of</strong> the cantilever it follows that<br />
y ≤ h.<br />
After substituting h 0 = δ 0 + h, introducing<br />
dimensionless time t new = k 2·t and change <strong>of</strong> the<br />
variable<br />
y = h 0 − ξ<br />
(7)<br />
the differential equation (6) takes the form<br />
& β<br />
ξ & + ξ − α +<br />
2<br />
ξ<br />
= 0 . (8)<br />
Here are denoted the following parameters<br />
g<br />
κ<br />
α = h0<br />
− ,<br />
β = . (9)<br />
2<br />
2<br />
k<br />
m⋅ k<br />
For the change <strong>of</strong> the variable it follows the<br />
constrain<br />
ξ ≥ δ 0 . (10)<br />
By the energy transformation & ξ<br />
ξ & 1 d 2<br />
=<br />
&<br />
the<br />
2 dξ<br />
differential equation is yield<br />
2<br />
1 d ξ & β<br />
= α − ξ −<br />
(11)<br />
2 dξ<br />
2<br />
ξ<br />
from which after separating <strong>of</strong> the variables the first<br />
integral is worked out<br />
1 β<br />
ξ & 2 1 2<br />
= αξ − ξ + + C . (12)<br />
2 2 ξ<br />
By the so obtained expression after substitution<br />
with different values <strong>of</strong> the integrating constant C<br />
the phase trajectories in the plane ξ & , ξ <strong>of</strong> the<br />
<strong>oscillating</strong> <strong>system</strong> can be described [8].<br />
4. Determination <strong>of</strong> the bifurcation areas<br />
Bifurcation zones are determined by the values<br />
<strong>of</strong> the parameters α and β for which the phase states<br />
<strong>of</strong> the <strong>system</strong> change its nature. For these states to<br />
be worked out the function<br />
1 2 β<br />
f = α ⋅ξ − ξ + , (13)<br />
2 ξ<br />
is considered, which completely determines the<br />
phase trajectories. For this purpose Eq. (13) is<br />
presented as a sum <strong>of</strong> two functions<br />
f = f 1 + f 2<br />
(14)<br />
where<br />
1 2<br />
β<br />
f 1 = α⋅ ξ − ξ , f 2 = . (15)<br />
2<br />
ξ<br />
From (9), β is a positive nonzero parameter but<br />
α theoretically can be also negative and zero<br />
parameter. The negative values <strong>of</strong> α are possible<br />
when simultaneously the air gap h and the
Dynamical Synthesis <strong>of</strong> Oscillating System Mass-Spring-Magnet<br />
imaginary gap δ 0 are small, and the natural<br />
frequency k is low. Such values are relatively rarely<br />
used in the techniques. It is known that the function<br />
f 2 is discontinuous for ξ = 0 and it is strictly<br />
monotone decreasing. The function f 1 is a parabola<br />
with a zero root and a second root equal to 2α. They<br />
are possible two variants <strong>of</strong> the sum function f. The<br />
first one is it to be a strictly monotone decreasing<br />
function, and the second one is it to possess two<br />
extremes. At the first case there will not be a<br />
singular point in the phase trajectories. At the<br />
second case two singular points will occur, that<br />
correspond to the stable and unstable equilibrium<br />
points. The limit case between the two states is a<br />
point <strong>of</strong> inflection in the function f. For this it<br />
follows the appearance <strong>of</strong> a cusp point in the phase<br />
trajectories. From this limit state the condition <strong>of</strong><br />
bifurcation is obtained, which is expressed as<br />
simultaneously null <strong>of</strong> first and second derivation <strong>of</strong><br />
f. It follows to the <strong>system</strong><br />
β<br />
α − ξ −<br />
2<br />
ξ<br />
= 0 2β<br />
; −1<br />
= 0 .<br />
3<br />
(16)<br />
ξ<br />
From the <strong>system</strong> (16) it is obtained<br />
1 β = ξ<br />
3 ;<br />
2<br />
3 α = ξ ,<br />
2<br />
(17)<br />
which is a parametric equation <strong>of</strong> the bifurcation<br />
curve. After isolating <strong>of</strong> the parameter ξ the<br />
equation <strong>of</strong> the bifurcation curve<br />
β =<br />
4 α<br />
3<br />
(18)<br />
27<br />
is obtained. The graph <strong>of</strong> this curve is presented in<br />
Figure 5.<br />
From the above mentioned it follows that for<br />
values <strong>of</strong> α and β over the bifurcation curve, i.e.<br />
when<br />
4 β > α<br />
3<br />
(19)<br />
27<br />
conditions for oscillations do not exist. In case <strong>of</strong><br />
this combination <strong>of</strong> the parameters the <strong>mass</strong> will<br />
accomplish only one displacement with variable<br />
acceleration. The closer to the <strong>magnet</strong> is the <strong>mass</strong>,<br />
the higher is its velocity. This kind <strong>of</strong> motion and<br />
the functions f, f 1 and f 2 , are shown in Figure 6.<br />
Vice versa, if α and β are with values under the<br />
bifurcation curve, both <strong>oscillating</strong> or aperiodical<br />
one-way motion are possible. This kind <strong>of</strong> motion<br />
and the functions f, f 1 and f 2 are shown in Figure 7.<br />
Figure 5. Bifurcation curve<br />
Figure 6. Typical phase portraits <strong>of</strong> the <strong>system</strong> with<br />
values <strong>of</strong> α and β over the bifurcation curve<br />
RECENT, Vol. 10, no. 1(25), March, 2009 53
Dynamical Synthesis <strong>of</strong> Oscillating System Mass-Spring-Magnet<br />
In order the Eq. (22) to possess three different<br />
roots it is necessary<br />
1 3 1<br />
D = − β⋅α + β<br />
2 < 0 , (24)<br />
27 4<br />
from where the condition is yield<br />
4 β < α<br />
3 . (25)<br />
27<br />
This result confirms again the pro<strong>of</strong> that the<br />
equilibrium points can exist only if the parameters<br />
α and β are chosen under the bifurcation curve. In<br />
this case there are three equilibrium points, but as it<br />
can be seen on Figure 7, only two <strong>of</strong> them are<br />
positive. This statement can be proved easily. The<br />
equilibrium point with the biggest positive<br />
coordinate is a stable center. The second positive<br />
equilibrium point is an unstable saddle. Through it<br />
the phase curve S passes, called separatrix. This<br />
separatrix splits the phase plane in areas with stable<br />
oscillations and areas with aperiodical single<br />
displacements with variable accelerations.<br />
Figure 7. Typical phase portraits <strong>of</strong> the <strong>system</strong> with α<br />
and β under the bifurcation curve<br />
5. Equilibrium point investigation<br />
The equilibrium or singular points [5, 7, 8] <strong>of</strong><br />
the <strong>oscillating</strong> <strong>system</strong> follow from the <strong>system</strong> <strong>of</strong><br />
algebraic equations<br />
& ξ & = 0 , ξ & = 0 . (20)<br />
The second equation shows that the singular<br />
points lie on the axis Оξ & . From the first equation<br />
taking <strong>of</strong> account (8) it follows<br />
β<br />
− ξ + α −<br />
2<br />
ξ<br />
= 0<br />
(21)<br />
or for ξ ≠ 0 it is yield<br />
3<br />
− ξ + α ⋅ξ − β = 0 . (22)<br />
This cubic equation [9] has a discriminate<br />
1 3 1 2<br />
D = − β ⋅α + β . (23)<br />
27 4<br />
6. Dynamical <strong>synthesis</strong> <strong>of</strong> the <strong>oscillating</strong> <strong>system</strong><br />
The aim <strong>of</strong> the <strong>dynamical</strong> <strong>synthesis</strong> <strong>of</strong> the<br />
<strong>magnet</strong>o-mechanical <strong>system</strong> is expressed here in<br />
finding <strong>of</strong> such combination <strong>of</strong> the parameters,<br />
which guarantees periodic oscillations.<br />
Firstly, a <strong>magnet</strong> couple with imaginary <strong>magnet</strong><br />
<strong>mass</strong> κ = 0.6268×10 -6 Nm 2 and imaginary initial<br />
gap δ 0 =1.2348×10 -3 m according to formula (1) is<br />
chosen. From the expressions (9) with a given<br />
natural frequency k = 400 s –1 it is found<br />
α = h 0 – g/k 2 = 0.004172. A <strong>mass</strong> m = 0.005 kg is<br />
chosen and the condition (24) is checked up, finding<br />
initially β = κ / m·k 2 = 7.924×10 -10 and after<br />
substituting in β > 4α 3 / 27 = 1.075×10 -8 – obtaining<br />
the necessary relation. The stiffness <strong>of</strong> the <strong>system</strong> is<br />
found by c = m·k 2 = 800 N/m. The obtained<br />
parameters are sufficient for choosing the rest <strong>of</strong> the<br />
geometrical parameters and material properties.<br />
The so chosen values do not guarantee oscillations<br />
with the prescribed mechanical frequency,<br />
because the <strong>system</strong> is nonlinear and in the considered<br />
case it is proved that the natural frequency is lower<br />
than the mechanical one. On bigger amplitudes<br />
because <strong>of</strong> isohornity <strong>of</strong> the <strong>system</strong> the frequency<br />
depends on the initial conditions.<br />
The shape <strong>of</strong> the synthesized functions f, f 1 , f 2<br />
and phase portrait <strong>of</strong> the <strong>system</strong> is shown in Figure<br />
8. From the figure it can be seen that the <strong>system</strong> has<br />
only one singular point corresponding to an<br />
equilibrium point <strong>of</strong> type focus. The next<br />
equilibrium point which is unstable gets in the zone<br />
ξ < δ 0 and it could not be reached because <strong>of</strong> the<br />
54 RECENT, Vol. 10, nr. 1(25), Martie, 2009
Dynamical Synthesis <strong>of</strong> Oscillating System Mass-Spring-Magnet<br />
stroke constraint. The same is relevant to the third<br />
equilibrium point, which is negative. The constraint<br />
ξ ≥ δ 0 changes the nature <strong>of</strong> motion <strong>of</strong> the <strong>system</strong><br />
for the area inside the separatrix S, because here<br />
constraints for the periodical motions appear and in<br />
this way they turn in aperiodical ones.<br />
7. Conclusion<br />
The qualitative analysis <strong>of</strong> the considered<br />
<strong>magnet</strong>o-mechanical <strong>system</strong> allows the properties<br />
<strong>of</strong> the <strong>system</strong> to be discovered. This analysis is a<br />
unique mean <strong>of</strong> studying similar <strong>system</strong>s in the<br />
cases when the differential equation is nonlinear<br />
and cannot be solved exactly, or it leads to solutions<br />
which cannot be analyzed. On the base <strong>of</strong> the<br />
qualitative analysis it is possible a preliminarily<br />
<strong>dynamical</strong> <strong>synthesis</strong> <strong>of</strong> the real <strong>oscillating</strong> <strong>system</strong> to<br />
be achieved.<br />
References<br />
1. Konstantinov M.C.: Theory <strong>of</strong> mechanisms and machines.<br />
Tehnika, S<strong>of</strong>ia, 1959, p. 493-501 (in Bulgarian)<br />
2. Litvin, F.L.: Design <strong>of</strong> Mechanisms and Instrument<br />
Elements. Mashinostroene, Moscow, 1973 (in Russian)<br />
3. Levitskii, N.I.: Theory <strong>of</strong> mechanisms and machines. Nauka,<br />
Moscow, 1979, p. 280-292 (in Russian)<br />
4. Jordan, D.W., Smith, P.: Nonlinear ordinary differential<br />
equations. 3 rd Ed. Oxford University Press Inc., New York,<br />
2007, p. 2-126<br />
5. Butenin, N.V., Nejmark, U.I., Fufaev, N.A.: Introduction in<br />
nonlinear theory <strong>of</strong> oscillations. Nauka, Moscow, 1987, p.<br />
5-51 (in Russian)<br />
6. Timoshenko, S., Woinovski-Krieger, S.: Theory <strong>of</strong> Plates<br />
and Shells. McGraw-Hill INC, New York, 1959, p. 63-76<br />
7. Rothwell, E.J., Cloud, M.J.: Electro<strong>magnet</strong>ics. CRC Press<br />
LLC, London, 2001, p. 15-31<br />
8. Khalil, K.H.: Nonlinear Equations. 2 nd Edition, Rmuee-HdI.<br />
Inc, London, ISBN 0-13-P8U24-8, 1996, p. 57-88<br />
9. Bronshtein, I.N.,·Semendyayev, K.A., Musiol, G.,·Muehlig,<br />
H.: Handbook <strong>of</strong> Mathematics. 5 th Ed. Springer, ISBN 978-<br />
3-540-72121-5, 2007, p. 39-43<br />
Received in February 2009<br />
δ 0<br />
Figure 8. Phase portrait <strong>of</strong> the synthesized <strong>system</strong><br />
RECENT, Vol. 10, no. 1(25), March, 2009 55











