RTI - Systems Modeling Simulation Lab. KAIST
RTI - Systems Modeling Simulation Lab. KAIST
RTI - Systems Modeling Simulation Lab. KAIST

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
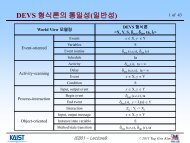
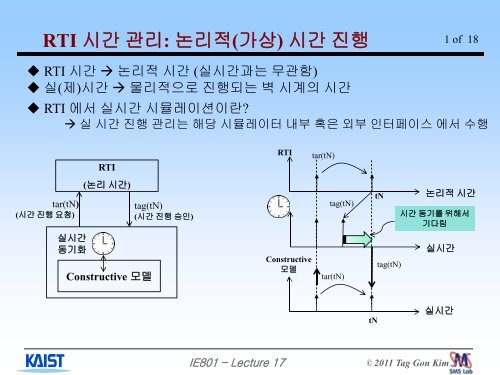
<strong>RTI</strong> 시간 관리: 논리적(가상) 시간 진행<br />
1 of 18<br />
<strong>RTI</strong> 시간 논리적 시간 (실시간과는 무관함)<br />
실(제)시간 물리적으로 진행되는 벽 시계의 시간<br />
<strong>RTI</strong> 에서 실시간 시뮬레이션이란<br />
실 시간 진행 관리는 해당 시뮬레이터 내부 혹은 외부 인터페이스 에서 수행<br />
<strong>RTI</strong><br />
<strong>RTI</strong><br />
tar(tN)<br />
tar(tN)<br />
(시간 진행 요청)<br />
(논리 시간)<br />
tag(tN)<br />
(시간 진행 승인)<br />
tag(tN)<br />
tN<br />
논리적 시간<br />
시간 동기를 위해서<br />
기다림<br />
실시간<br />
동기화<br />
Constructive 모델<br />
Constructive<br />
모델<br />
tar(tN)<br />
tag(tN)<br />
실시간<br />
tN<br />
실시간<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
<strong>RTI</strong> 에서 시간 관리 기능 가능 여부<br />
2 of 18<br />
1. Constructive (S/W) 모델 연동 시간 관리 가능 TSO 메시지 사용<br />
C1<br />
시간 + 데이터<br />
C2<br />
시간 관리: C1 과 C2 내부에서 발생하는 이벤트들을<br />
시간 순서되로 처리하도록 시간 진행 요청<br />
및 허가를 주고 받는 것<br />
<strong>RTI</strong> 시간 관리 모듈<br />
TSO 메시지 이용<br />
2. 실제장비, 실시간 시스템 연동 시간 관리 불 가능 RO 메시지 사용<br />
장비<br />
V<br />
데이터<br />
<strong>RTI</strong> 시간 관리 기능 사용 안 함<br />
RO 메시지 이용<br />
시간 관리 불 가능: 장비나 V 내부에서 진행되는<br />
이벤트를 외부에서 시간 순으로<br />
관리 할 수 없음<br />
3. 경우 1 + 경우 2 연동 시간 관리 불가능<br />
RO 메시지<br />
C<br />
V<br />
데이터<br />
C<br />
V<br />
<strong>RTI</strong> 시간 관리 기능 사용 안 함<br />
IE801 – Lecture 17<br />
<strong>RTI</strong><br />
© 2011 Tag Gon Kim
<strong>RTI</strong> 기반 페더레이션 연동<br />
페더레이트 1 페더레이트 2<br />
시뮬레이터 1 시뮬레이터 2<br />
인터패이스<br />
인터패이스<br />
페더레이트 N<br />
시뮬레이터 N<br />
인터패이스<br />
3 of 18<br />
사용자<br />
개발<br />
지역 <strong>RTI</strong><br />
지역 <strong>RTI</strong><br />
통신 네트워크<br />
<strong>RTI</strong> 집행자<br />
FED 집행자<br />
지역 <strong>RTI</strong><br />
<strong>RTI</strong><br />
Tool Kit<br />
[내부구조는<br />
숨겨져 있음]<br />
● 지역 <strong>RTI</strong> 의 역할<br />
■ 각 페더레이트 (지역 시뮬레이터)의 시뮬레이션 진행 제어<br />
■ FOM/SOM 기반 연동 객체 및 인터랙션 관리<br />
● <strong>RTI</strong>/FED 집행자의 역할<br />
■ 지역 <strong>RTI</strong> 들 사이의 시간 진행 및 데이터 교환 관리<br />
■<br />
FOM 기반 연동 객체 및 인터랙션 관리<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
<strong>RTI</strong>/시뮬레이터 인터페이스 및 HLA-Compliant<br />
4 of 18<br />
(제공된 <strong>RTI</strong> 서비스 사용)<br />
시뮬레이터<br />
(필요한 Callback 함수 지원)<br />
연동 대상<br />
시뮬레이터<br />
인터패이스<br />
<strong>RTI</strong> 제공 API (103 개) <strong>RTI</strong> 가 사용할 API (39 개)<br />
13 8 9 9 19 12 33<br />
13 4 9 9<br />
4<br />
패더레이션<br />
관리<br />
선언<br />
관리<br />
객체<br />
관리<br />
소유권<br />
관리<br />
시간<br />
관리<br />
데이타<br />
분산<br />
관리<br />
기타<br />
부수적인<br />
관리<br />
페더레이션<br />
관리<br />
선언<br />
관리<br />
객체<br />
관리<br />
소유권<br />
관리<br />
시간<br />
관리<br />
<strong>RTI</strong> 라이브러리<br />
(<strong>RTI</strong> 제품)<br />
시각 동기용<br />
데이터 교환용<br />
지역 <strong>RTI</strong> (LRC)<br />
● HLA-Compliant (HLA 규약을 만족하는) 시뮬레이터 란<br />
이 기종 시뮬레이터 간의 시각 동기화 및 테이타 교환을 HLA 규격에 맞추어 진행하기 위하여<br />
1. 시뮬레이터는 <strong>RTI</strong> 가 제공하는 103 개의 서비스(함수)를 적절히 활용 함<br />
2. 시뮬레이터는 <strong>RTI</strong> 가 사용할 39 개의 서비스(Callback 함수)를 제공(구현) 해야 함<br />
[주의] HLA-Compliant 인증 시에는 모든 API 를 확인하지는 것이 아니고 인증 대상 시뮬레이터가<br />
현재 사용 중인 API 만 확인 할 수 있음. 실제로 20 개 내외의 API 를 사용하여 인증 받음<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant (<strong>RTI</strong> 에 연동 가능한) C 조건<br />
5 of 18<br />
페더레이트: 연동 목적이 달라 짐 FOM 달라짐 SOM 달라짐<br />
시뮬레이트Ⅰ<br />
시뮬레이트 I<br />
시뮬레이트 I<br />
I/F<br />
SOM 1<br />
I/F<br />
SOM 2<br />
…<br />
I/F<br />
SOM N<br />
FOM 1<br />
FOM 2<br />
FOM N<br />
HLA-Compliant Constructive Model<br />
표준 API 사용 측면<br />
D 1 D …<br />
2 D M<br />
페드레이트<br />
데이터 연동 측면<br />
D 1 D …<br />
2 D M<br />
연동 데이터 선택 기능<br />
갱신/참조 지정<br />
개발 시 요구 사항<br />
구매 시 확인 필요<br />
103 서비스 39 서비스<br />
D 1<br />
D M<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
Constructive 모델의 SOM 수정 절차<br />
HLA-Compliant C 시뮬레이터<br />
D 1 D …<br />
2 D M<br />
6 of 18<br />
시뮬레이터가 SOM 에 있는 정보를<br />
인터페이스를 통하여 갱신하거나 참조 한다.<br />
SOM<br />
D 1<br />
D M<br />
FOM 이 달라지면 SOM 이 달라짐<br />
SOM’ 로 변경<br />
예<br />
SOM’이<br />
시뮬레이터<br />
내부에 존재<br />
예<br />
시뮬레이터<br />
소스 코드<br />
아니오<br />
HLA<br />
Compliant<br />
시뮬레이터<br />
아니오<br />
SOM’<br />
구현 불가<br />
아니오<br />
예<br />
SOM’ 에 맞게<br />
시뮬레이터 내부 수정<br />
SOM’ 갱신/참조로<br />
인터페이스 수정<br />
기 정의된<br />
SOM 이<br />
SOM’ 포함<br />
예<br />
SOM’ 갱신/참조로 인터페이스 수정<br />
아니오<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant (<strong>RTI</strong> 에 연동 가능한) V 조건<br />
7 of 18<br />
HLA-Compliant V Simulator<br />
V 가 제작될 당시 RPR FOM 에 제시된 모든 데이터를<br />
외부에서 접근 (읽기 및 쓰기) 할 수 있도록<br />
H/W 가 제작되고 S/W 가 지원 되어야 함.<br />
Virtual<br />
Simulator A<br />
Virtual<br />
Simulator B<br />
ForceIdentifier<br />
HatchState<br />
Adaptor<br />
…<br />
Adaptor<br />
Adaptor<br />
HLA/<strong>RTI</strong><br />
Virtual Simulator들의<br />
연동을 위한 데이터 집합 표준<br />
RPR FOM<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant Virtual 시뮬레이터의 SOM<br />
8 of 18<br />
Real-time Platform Reference FOM<br />
Virtual Simulator 들이 연동 시 사용되는 SOM 의 집합<br />
SISO(<strong>Simulation</strong> Interoperability Standards Organization) 에서 정의<br />
Common Foundation Reference FOM (CF-RFOM) 의 일종<br />
• Platform 객체 들이 연동에 참여 시 각 Platform 들의 SOM 의 총 집합<br />
• RPR FOM 은 Platform 연동 시 필요한 모든 데이터를 미리 가정하여 정한 것 임<br />
적용 분야<br />
• 실시간의 플랫폼 기반 연동 시뮬레이션 (DIS 및 HLA 기반)<br />
• 참여 시뮬레이터: 독립적인 물리적 실체 (예: 항공기, 배, 군인, 무기)<br />
H/W<br />
V 가 제작될 당시 RPR FOM 중 해당 Platform 에 속한<br />
모든 데이터를 SOM 으로 정의하여 이를 외부로 보내고<br />
받을 수 있도록 H/W 및 S/W 가 지원 되어야 함.<br />
SOM = RPR FOM 중 해당<br />
Platform에 속한 데이터<br />
<strong>RTI</strong> API<br />
Platform 기반 연동 페더레이션 FOM<br />
RPR FOM (모든 Platform SOM 들의 집합)<br />
+ Platform 이 아닌 타 시뮬레이터들의 SOM<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
RPR FOM (Objects & Interactions) 구성<br />
9 of 18<br />
BaseEntity<br />
Attributes_B<br />
EntityType<br />
EntityIdentifier<br />
IsPartOf<br />
Spatial<br />
RelativeSpatial<br />
PhysicalEntity<br />
Platform<br />
Attributes_PL<br />
AfterburnerOn<br />
AntiCollisionLightsOn<br />
BlackOutBrakeLightsOn<br />
BlackOutLightsOn<br />
BrakeLightsOn<br />
FormationLightsOn<br />
HatchState<br />
HeadLightsOn<br />
InteriorLightsOn<br />
LandingLightsOn<br />
LauncherRaised<br />
NavigationLightsOn<br />
RampDeployed<br />
RunningLightsOn<br />
SpotLightsOn<br />
TailLightsOn<br />
Aircraft<br />
AmphibiousVehicle<br />
GroundVehicle<br />
MultiDomainPlatform<br />
Spacecraft<br />
SubmersibleVessel<br />
SurfaceVessel<br />
+ +<br />
Attributes_PH<br />
AcousticSignatureIndex<br />
AlternateEntityType<br />
ArticulatedParametersArray<br />
CamouflageType<br />
DamageState<br />
EngineSmokeOn<br />
FirePowerDisabled<br />
FlamesPresent<br />
ForceIdentifier<br />
HasAmmunitionSupplyCap<br />
HasFuelSupplyCap<br />
HasRecoveryCap<br />
HasRepairCap<br />
Immobilized<br />
InfraredSignatureIndex<br />
IsConcealed<br />
LiveEntityMeasuredSpeed<br />
Marking<br />
PowerPlantOn<br />
Propulsion<strong>Systems</strong>Data<br />
RadarCrossSectionSignatureIndex<br />
SmokePlumePresent<br />
TentDeployed<br />
TrailingEffectsCode<br />
VectoringNozzleSystemData<br />
Objects = A_B + A_PH + A_PL<br />
IE801 – Lecture 17<br />
WeaponFire<br />
Parameters<br />
EventIdentifier<br />
FireControlSolutionRange<br />
FireMissionIndex<br />
FiringLocation<br />
FiringObjectIdentifier<br />
FuseType<br />
InitialVelocityVector<br />
MunitionObjectIdentifier<br />
MunitionType<br />
QuantityFired<br />
RateOfFire<br />
TargetObjectIdentifier<br />
WarheadType<br />
Interactions<br />
!!! 차후 연동을 고려한 시뮬레이터 개발 시<br />
RPR FOM 구현 필수 !!!<br />
© 2011 Tag Gon Kim
Virtual 시뮬레이터의 SOM 수정 절차<br />
10 of 18<br />
H/W<br />
시뮬레이터가 SOM 에 있는 정보를<br />
인터페이스를 통하여 갱신하거나 참조 한다.<br />
SOM = RPR FOM 중 해당<br />
Platform에 속한 데이터<br />
FOM 이 달라지면 SOM 이 달라짐<br />
SOM’ 로 변경<br />
예<br />
SOM’이<br />
H/W 및 S/W<br />
에 포함<br />
예<br />
H/W 및 S/W<br />
수정 가능<br />
아니오<br />
HLA<br />
Compliant<br />
시뮬레이터<br />
아니오<br />
SOM’<br />
구현 불가<br />
아니오<br />
SOM’ 에 맞게<br />
H/W 및 S/W 수정<br />
SOM’ 갱신/참조로<br />
인터페이스 수정<br />
예<br />
기 정의된<br />
SOM 이<br />
SOM’ 포함<br />
예<br />
SOM’ 갱신/참조로 인터페이스 수정<br />
아니오<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
RPR FOM 과 HLA-Compliant<br />
11 of 18<br />
Real-time Platform Reference (RPR) FOM<br />
Virtual Simulator 들이 연동 시 사용되는 SOM 의 집합<br />
SISO(<strong>Simulation</strong> Interoperability Standards Organization) 에서 정의<br />
Common Foundation Reference FOM (CF-RFOM) 의 일종<br />
• Platform 객체 들이 연동에 참여 시 각 Platform 들의 SOM 의 총 집합<br />
• RPR FOM 은 Platform 연동 시 필요한 모든 데이터를 미리 가정하여 정한<br />
것 임<br />
적용 분야<br />
• 실시간의 플랫폼 기반 연동 시뮬레이션 (DIS 및 HLA 기반)<br />
• 참여 시뮬레이터: 독립적인 물리적 실체 (예: 항공기, 배, 군인, 무기)<br />
HLA-Compliant<br />
Constructive 모델인 경우<br />
• 소스 코드가 접근 불가능 한 경우 FOM 은 RPR FOM 을 구현해야 함<br />
• EADSIM, SADAM 등은 RPR FOM 이 내장 됨<br />
Virtual Simulator 인 경우<br />
• RPR FOM 을 시뮬레이터에 내장해야 함<br />
최근 HLA-Compliant 정의 : C, V 에 관계없이 SOM = RPR FOM 으로 구현<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliance 페드레이트 인증<br />
12 of 18<br />
무엇을 인증하는냐 : 페드레이트의 주어진 SOM 에 대한 HLA 인터페이스 준수 여부<br />
인증 기관은 : DoD 산하 M&S CO(MSCO) 담당 (구: DMSO)<br />
어떤 방법으로 하느냐: 누구나 Internet을 통해서 문서 제출 및 결과 통보<br />
절차는 어떻게 되는냐 : 간략화한 절차는 아래 그림 참조 (세부사항)<br />
신청자<br />
MSCO<br />
단계 1<br />
테스팅 정보 요구 및 페드레이트 기본 정보 제출<br />
인증 시작 및 인증 가이드라인 전달<br />
단계 2<br />
적합성 자료 제출 : SOM, 적합성 문서, 시나리오<br />
SOM 테스팅 결과, 테스팅 시퀀스 , 테스팅 데이터 전달<br />
MSCO 홈피 참조<br />
단계 3<br />
테스팅 페더레이트 와 .rid/fed 제출 및 테스팅 실행 요구<br />
테스팅 결과 전달 및 인증 요약 보고서 전달<br />
*MSCO의 HLA 페드레이트 Compliance 인증 프로세스 요약<br />
IE801 – Lecture 17<br />
*http://www.msco.mil/hla.html<br />
© 2011 Tag Gon Kim
HLA-Compliant 인증 준비<br />
13 of 18<br />
인증을 위한 페드레이트<br />
(시뮬레이터 + 인터페이스 + SOM)<br />
청 헤<br />
SOM 1<br />
단독 시뮬레이터<br />
연동 인터페이스<br />
SOM<br />
연동 인터페이스 1<br />
청해 인증을 위한 페드레이트<br />
<strong>RTI</strong><br />
인증 시 시뮬레이터 내부 동작은 알 수 없음<br />
SOM 내용 되로 <strong>RTI</strong> 와 통신하는지만 확인 가능 함<br />
창공<br />
연동 인터페이스 2<br />
SOM 2<br />
HLA-Compliant 인증을 위한 준비 사항<br />
1. SOM<br />
연동 시 사용되는 데이터 (오브젝트) 및 메시지(인터렉션)<br />
2. 연동 인터페이스<br />
<strong>RTI</strong> 와 시뮬레이터 사이에 시간 동기 및 SOM 내용 전달<br />
창공 인증을 위한 페드레이트<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant 인증의 문제점<br />
14 of 18<br />
시뮬레이터 1<br />
연동 인터페이스 1<br />
SOM1<br />
페더레이션 1<br />
응용 I<br />
시뮬레이터 1<br />
연동 인터페이스 1<br />
SOM1<br />
<strong>RTI</strong><br />
페드레이트 A<br />
시뮬레이터 1<br />
SOM 2 페더레이션 2<br />
응용 II<br />
연동 인터페이스 2<br />
HLA-Compliant 인증 시 문제점<br />
시뮬레이터 1<br />
SOM 2<br />
연동 인터페이스 2<br />
페드레이트 B<br />
<strong>RTI</strong><br />
1. 동일한 시뮬레이터라고 할 지 라도 최종 구성될 페더레이션에 따라 SOM-인터페이스가 달라짐<br />
인증 시 사용한 SOM – 인터페이스 가 실제 응용에서와 동일하지 않으면 의미가 없다.<br />
2. 인증 신청 시 페드레이트가 최종 참여할 페더레이션의 FOM 을 기반으로 한 SOM 을 사용하지 않는다.<br />
최종 사용될 FOM 을 모르거나 FOM 의 일부인 SOM 이 다 준비가 되지 않는 경우<br />
(예: 연합 훈련에 참여한 페드레이트들이 인증에 사용한 SOM 이 JTTI+(JCT) FOM 기반이 아니 었음)<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant 인증 필요한가<br />
15 of 18<br />
페드레이트 HLA 인증 배경<br />
한.미 연합 연동 훈련에 참여할 페드레이트는 모두 인증을 받은 후 참여한다.<br />
한국군 페드레이트( 창조, 청해, 창공, 천자봉) 는 모두 인증을 받았다.<br />
미국이 연합 훈련에 참여할 한측 페드레이트에 인증을 요구한 이유<br />
<strong>RTI</strong> 기반 연동 훈련에서는 참여 하는 페드레이트는 훈련 중 1 개라도 문제가 생겨서<br />
페드레이트가 중단되면 <strong>RTI</strong> 가 죽어 버려 전체 페더레이션이 중단 될 수 있다.<br />
인증은 미국이 인정하는 공인 기관에서 받는 것을 요구해 왔다.<br />
미군 모델과 연동하지 않는 경우 MSCO 의 인증이 필요한가<br />
MSCO 인증은 꼭 필요한 사항이 아니다.<br />
미군 모델과 연동을 하지 않는데 왜 미국 인증 기관에서 인증을 받아야 하는가<br />
인증이 꼭 필요 하다면 우리나라 공인 기관에서 할 수 있어야 한다.<br />
현재 기품원에서 HLA-Compliant 인증 준비 중<br />
사업 상 필요하다면 각 페드레이트 의 HLA-Compliant 인증 보다는 페더레이션 전체<br />
에 대한 철저한 시험/평가가 더 의미가 있다.<br />
페드레이트 인증 시 SOM 과 사업에서 최종적으로 사용할 SOM 이 다를 수 있음<br />
인증은 반드시 사업에서 최종 사용할 FOM 을 구현하는 SOM 을 사용 할 것<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
HLA-Compliant 인증을 위한 만능 아답터<br />
16 of 18<br />
단독 시뮬레이터<br />
SOM<br />
연동 인터페이스<br />
< 만능 KHLA 아답터 접근법 ><br />
<strong>RTI</strong> 의 모든 인터페이스를 모두<br />
구현해 놓은 아답터를 사용 함<br />
시뮬레이터와 인터페이스를<br />
독립 프로세스로 분리 시킴<br />
(연동 신뢰도 향상)<br />
HLA-compliant 인증 준비<br />
인터페이스 구현은 하지 않고<br />
연동 어프리케니션 만 작성 함.<br />
<strong>RTI</strong><br />
단독 시뮬레이터<br />
만능 KHLA 아답터*<br />
(<strong>RTI</strong> 모든 인터페이스 구현)<br />
<strong>RTI</strong><br />
구현<br />
* KHLA 아답터 – <strong>KAIST</strong> SMS 연구실 개발<br />
SOM<br />
C++ 클래스<br />
SOM2C++<br />
자동 변환기<br />
모든 인터페이스 중 응용에서<br />
실제 사용할 인터페이스 지정<br />
연동 어프리케이션<br />
(개발자 몫)<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
DEVSimHLA Tools Set 을 이용한 Federates 개발 및 인증<br />
17 of 18<br />
청해, 창공, 천자봉<br />
해군 분석모델 등<br />
단독 시뮬레이터<br />
만능 KHLA 아답터<br />
(<strong>RTI</strong> 모든 인터페이스 구현)<br />
SOM<br />
C++ 클래스<br />
SOM2C++<br />
자동 변환기<br />
모든 인터페이스 중 응용에서<br />
실제로 채워<br />
넣어야 부분<br />
실제 사용할 인터페이스 지정<br />
<strong>RTI</strong><br />
인증 번호.<br />
페드레이트 이름<br />
HLA Spec.<br />
Version 인증 일자 신청한 기관<br />
254 Cheong-hae v1.0 (청해) 1.3 07/19/2003 ROK NSMD<br />
259 AFECS OCS v1.0 (철매 II) 1.3 07/01/2004 ROK ADD<br />
261 AFECS HES v1.0 (철매 II) 1.3 09/03/2004 ROK ADD<br />
262 AFECS AECS v1. 0(철매 II) 1.3 09/03/2004 ROK ADD<br />
284 ChangGong v1.0 (창공) 1.3 06/09/2005 ROK AFOC<br />
Noram(해군분석모델) 1.3 04/12/2011 ROK NSMD<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim
만능 아답터 기반 인증: 시뮬레이터 없이도 가능<br />
18 of 18<br />
SOM<br />
인증 시 시뮬레이터<br />
내부 동작 확인 안 함<br />
단독 시뮬레이터<br />
SOM2C++<br />
자동 변환기<br />
인증 시 인터페이스가<br />
SOM 을 실행하느지를<br />
확인 함<br />
만능 KHLA 아답터<br />
(<strong>RTI</strong> 모든 인터페이스 구현)<br />
<strong>RTI</strong><br />
C++ 클래스<br />
모든 인터페이스 중 응용에서<br />
실제 사용할 인터페이스 지정<br />
연동 어프리케이션<br />
(개발자 몫)<br />
인증 I 준비<br />
인증 II 준비<br />
시뮬레이터<br />
사용되지 않음<br />
SOM 1<br />
SOM2C++<br />
자동 변환기<br />
시뮬레이터<br />
사용되지 않음<br />
SOM 2<br />
SOM2C++<br />
자동 변환기<br />
만능 KHLA 아답터<br />
C++ 클래스<br />
만능 KHLA 아답터<br />
C++ 클래스<br />
(<strong>RTI</strong> 모든 인터페이스 구현)<br />
모든 인터페이스 중 응용에서<br />
(<strong>RTI</strong> 모든 인터페이스 구현)<br />
모든 인터페이스 중 응용에서<br />
실제 사용할 인터페이스 지정<br />
실제 사용할 인터페이스 지정<br />
<strong>RTI</strong><br />
연동 어프리케이션<br />
(개발자 몫)<br />
<strong>RTI</strong><br />
연동 어프리케이션<br />
(개발자 몫)<br />
IE801 – Lecture 17<br />
© 2011 Tag Gon Kim