Solution - Ugrad.cs.ubc.ca
Solution - Ugrad.cs.ubc.ca
Solution - Ugrad.cs.ubc.ca

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
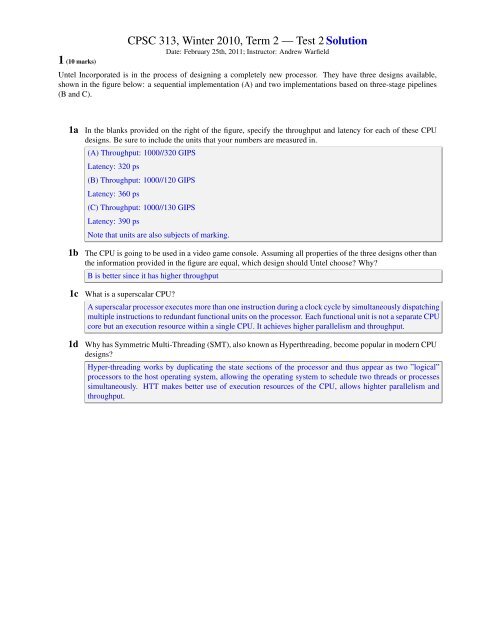
1 (10 marks)<br />
CPSC 313, Winter 2010, Term 2 — Test 2 <strong>Solution</strong><br />
Date: February 25th, 2011; Instructor: Andrew Warfield<br />
Untel Incorporated is in the process of designing a completely new processor. They have three designs available,<br />
shown in the figure below: a sequential implementation (A) and two implementations based on three-stage pipelines<br />
(B and C).<br />
1a In the blanks provided on the right of the figure, specify the throughput and latency for each of these CPU<br />
designs. Be sure to include the units that your numbers are measured in.<br />
(A) Throughput: 1000//320 GIPS<br />
Latency: 320 ps<br />
(B) Throughput: 1000//120 GIPS<br />
Latency: 360 ps<br />
(C) Throughput: 1000//130 GIPS<br />
Latency: 390 ps<br />
Note that units are also subjects of marking.<br />
1b The CPU is going to be used in a video game console. Assuming all properties of the three designs other than<br />
the information provided in the figure are equal, which design should Untel choose Why<br />
B is better since it has higher throughput<br />
1c What is a supers<strong>ca</strong>lar CPU<br />
A supers<strong>ca</strong>lar processor executes more than one instruction during a clock cycle by simultaneously dispatching<br />
multiple instructions to redundant functional units on the processor. Each functional unit is not a separate CPU<br />
core but an execution resource within a single CPU. It achieves higher parallelism and throughput.<br />
1d Why has Symmetric Multi-Threading (SMT), also known as Hyperthreading, become popular in modern CPU<br />
designs<br />
Hyper-threading works by dupli<strong>ca</strong>ting the state sections of the processor and thus appear as two ”logi<strong>ca</strong>l”<br />
processors to the host operating system, allowing the operating system to schedule two threads or processes<br />
simultaneously. HTT makes better use of execution resources of the CPU, allows highter parallelism and<br />
throughput.
2 (10 marks) The Y86-Pipe-Minus CPU implementation is a pipelined version of the Y86 that does not detect or<br />
eliminate hazards automati<strong>ca</strong>lly.<br />
Consider the following Y86 assembly code:<br />
0x000: irmovl $10, %edx<br />
0x006: irmovl $13, %eax<br />
0x00c: subl %edx, %eax<br />
0x00e: halt<br />
2a What unexpected thing will happen if this code is run and why it will happen<br />
Data harzard @ line 3.<br />
values in register %eax and %edx haven’t been written back when ”subl” instuction is executed.<br />
2b How <strong>ca</strong>n the developer fix it Write a modified version of the code that will behave as expected<br />
irmovl $10, %edx<br />
irmovl $13, %eax<br />
nop<br />
nop<br />
nop<br />
subl %edx, %eax<br />
halt<br />
2c Describe the two ways that the CPU designer could change the architecture to fix the problem that we discussed<br />
in class, and explain why one is better than the other.<br />
Stalling and Data forwarding (You need to simply explain what they are). Data forwarding is a better way<br />
when taking throughput, consistency into consideration.<br />
2d In the full, final, pipelined Y86 implementation (Y86-PIPE), there is a single type of data dependency that is<br />
not completely eliminated using data forwarding. What is it, and why <strong>ca</strong>n’t it be fixed<br />
use/load dependency <strong>ca</strong>nnot be fixed by using data forwarding since data is available only after memory stage<br />
and it is needed at decode stage of the load instruction. One bubble is needed.<br />
2
3 (4 marks) The following program has two instructions that stall the Y86-Pipe pipeline. Identify these instructions,<br />
list the number of cycles they stall, and explain the reason for the stall.<br />
[A] irmovl $1, %eax # r[eax]
y86 Cheat Sheet!<br />
Byte 0 1 2 3 4 5<br />
halt 0 0<br />
nop 1 0<br />
rrmovl rA, rB<br />
2 0 rA rB<br />
irmovl V, rB 3 0 F rB V<br />
rmmovl rA, D(rB) 4 0 rA rB<br />
mrmovl D(rB), rA 5 0 rA rB<br />
D<br />
D<br />
OPl rA, rB<br />
6 fn rA rB<br />
jXX Dest 7 fn Dest<br />
cmovXX rA, rB<br />
2 fn rA rB<br />
<strong>ca</strong>ll Dest 8 0 Dest<br />
ret 9 0<br />
pushl rA<br />
popl rA<br />
A 0 rA F<br />
B 0 rA F<br />
Operations<br />
Branches<br />
Moves<br />
addl 6 0<br />
jmp 7 0<br />
jne 7 4<br />
rrmovl 2 0<br />
cmovne 2 4<br />
subl 6 1<br />
jle 7 1<br />
jge 7 5<br />
cmovle 2 1<br />
cmovge 2 5<br />
andl 6 2<br />
jl 7 2<br />
jg 7 6<br />
cmovl 2 2<br />
cmovg 2 6<br />
xorl 6 3<br />
je 7 3<br />
cmove 2 3<br />
4