Evolutionary Computation : A Unified Approach
Evolutionary Computation : A Unified Approach
Evolutionary Computation : A Unified Approach

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
132 CHAPTER 6. EVOLUTIONARY COMPUTATION THEORY<br />
120<br />
Average Generations to Fixed-Point Convergence<br />
100<br />
80<br />
60<br />
40<br />
20<br />
Uniform stochastic<br />
Fitness-proportional<br />
Binary Tournament<br />
0<br />
0 50 100 150 200 250<br />
Parent=Offspring Population Size<br />
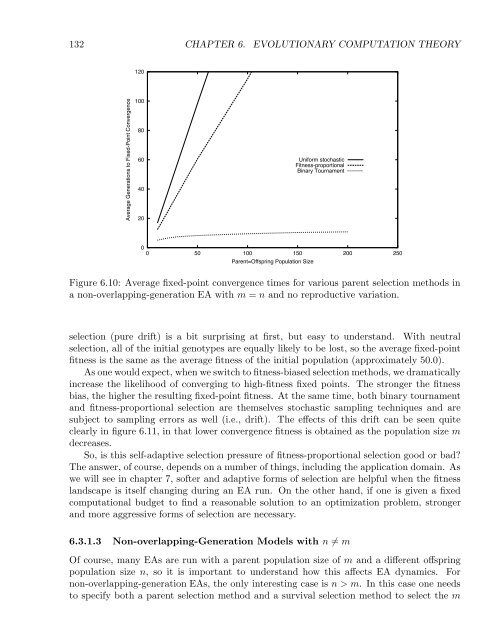
Figure 6.10: Average fixed-point convergence times for various parent selection methods in<br />
a non-overlapping-generation EA with m = n and no reproductive variation.<br />
selection (pure drift) is a bit surprising at first, but easy to understand. With neutral<br />
selection, all of the initial genotypes are equally likely to be lost, so the average fixed-point<br />
fitness is the same as the average fitness of the initial population (approximately 50.0).<br />
As one would expect, when we switch to fitness-biased selection methods, we dramatically<br />
increase the likelihood of converging to high-fitness fixed points. The stronger the fitness<br />
bias, the higher the resulting fixed-point fitness. At the same time, both binary tournament<br />
and fitness-proportional selection are themselves stochastic sampling techniques and are<br />
subject to sampling errors as well (i.e., drift). The effects of this drift can be seen quite<br />
clearly in figure 6.11, in that lower convergence fitness is obtained as the population size m<br />
decreases.<br />
So, is this self-adaptive selection pressure of fitness-proportional selection good or bad<br />
The answer, of course, depends on a number of things, including the application domain. As<br />
we will see in chapter 7, softer and adaptive forms of selection are helpful when the fitness<br />
landscape is itself changing during an EA run. On the other hand, if one is given a fixed<br />
computational budget to find a reasonable solution to an optimization problem, stronger<br />
and more aggressive forms of selection are necessary.<br />
6.3.1.3 Non-overlapping-Generation Models with n ̸=m<br />
Of course, many EAs are run with a parent population size of m and a different offspring<br />
population size n, so it is important to understand how this affects EA dynamics. For<br />
non-overlapping-generation EAs, the only interesting case is n>m. In this case one needs<br />
to specify both a parent selection method and a survival selection method to select the m