1 Wave propagation - USC Geodynamics
1 Wave propagation - USC Geodynamics
1 Wave propagation - USC Geodynamics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1 <strong>Wave</strong> <strong>propagation</strong><br />
1 WAVEPROPAGATION<br />
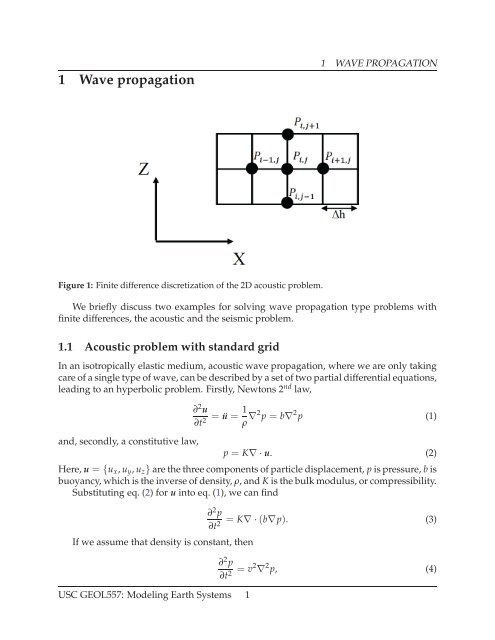
Figure1: Finitedifference discretization of the2D acousticproblem.<br />
We briefly discuss two examples for solving wave <strong>propagation</strong> type problems with<br />
finite differences, the acoustic and the seismicproblem.<br />
1.1 Acoustic problemwithstandardgrid<br />
In an isotropically elastic medium, acoustic wave <strong>propagation</strong>, where we are only taking<br />
careofasingletypeofwave,canbedescribedbyasetoftwopartialdifferentialequations,<br />
leadingtoan hyperbolic problem. Firstly, Newtons 2 nd law,<br />
and,secondly, a constitutive law,<br />
∂ 2 u<br />
∂t 2 = ü = 1 ρ ∇2 p = b∇ 2 p (1)<br />
p = K∇ ·u. (2)<br />
Here,u = {u x ,u y ,u z }arethethreecomponentsofparticledisplacement, pispressure,bis<br />
buoyancy,whichistheinverseofdensity, ρ,andKisthebulkmodulus,orcompressibility.<br />
Substituting eq.(2)for u into eq.(1), we can find<br />
Ifwe assume thatdensity isconstant, then<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 1<br />
∂ 2 p<br />
= K∇ · (b∇p). (3)<br />
∂t2 ∂ 2 p<br />
∂t 2 = v2 ∇ 2 p, (4)
1 WAVEPROPAGATION<br />
where<br />
v = √ Kb =<br />
√<br />
K<br />
ρ<br />
denotesthe bulk sound velocity. Simplifying toa2Dcase, wehave<br />
∂ 2 (<br />
p<br />
∂<br />
∂t 2 = v2 (x,z)<br />
2 )<br />
p<br />
∂x 2 + ∂2 p<br />
∂z 2 . (6)<br />
The equation for propogation of SH waves, the transverse components of S waves, in<br />
seismology hasasimilar form aseq. (6):<br />
∂ 2 (<br />
u<br />
∂<br />
∂t 2 = v2 SH (x,z) 2 )<br />
u<br />
∂x 2 + ∂2 u<br />
∂z 2 , (7)<br />
where u isthe displacementandV SH isthe velocity of the SH component.<br />
Likewise, a similar equation also applies for tsunami waves at long wavelengths, in<br />
the “shallow water approximation”,<br />
∂ 2 (<br />
ξ<br />
∂ 2 )<br />
∂t 2 = ξ<br />
v2 (x,z)<br />
∂x 2 + ∂2 ξ<br />
∂z 2 . (8)<br />
Here, ξ is the height of the tsunami wave, v is the velocity defined by the water depth H<br />
as<br />
v = √ gH. (9)<br />
To solve equations (6)-(8), with finite differences, we use the mesh shown in Fig. 1.<br />
Here, we have p n i,j<br />
= P(i∆h,j∆h,n∆t) and v i,j = v(i∆h,j∆h). Applying the 2 nd -order,<br />
second derivative formula to the acoustic waveequation eq.(6),<br />
p n−1<br />
i,j<br />
−2pi,j n + pn+1 i,j<br />
∆t 2<br />
= v 2 i,j<br />
[ p<br />
n<br />
i−1,j<br />
−2p n i,j + pn i+1,j<br />
∆h 2<br />
(5)<br />
+ pn i,j−1 −2pn i,j + ]<br />
pn i,j+1<br />
∆h 2 . (10)<br />
Afterrearranging, wehave<br />
(<br />
)<br />
p n+1<br />
i,j<br />
= −p n−1<br />
i,j<br />
+ (2 −4a i,j )2pi,j n +a i,j pi−1,j n + pn i+1,j + pn i,j−1 + pn i,j+1 , (11)<br />
where<br />
a i,j = v 2 ∆h 2<br />
i,j<br />
∆t2. (12)<br />
Then, the pressure ordisplacementattime step n +1can be derived explicitly from time<br />
step n and n −1 asin eq.(11), though two solutions have tobe stored.<br />
Note that we use 2 nd -order second derivatives in eq. (11). Two considerations are requiredforchoosingsuitabletimestep<br />
∆tandspatialstep ∆h: griddispersionandstability.<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 2
1 WAVEPROPAGATION<br />
When waves propagate on a discrete grid, they produces an artificial variation of velocity<br />
withfrequency, whichiscalledgriddispersion. Thehigherfrequencysignals,with<br />
slower velocity, are delayed relative to the lower frequency arrivals. This dispersion increases<br />
as ∆h becomes larger. In other words, a small ∆h is required to avoid grid dispersion.<br />
To achieve an accurate solution, we need at least 12 points per wavelength for space<br />
foraschemewith2 nd orderaccuracy. Fora4 th orderscheme,aminimumof6.5pointsper<br />
wavelength arerequired. For afixedfrequency, thisminimumwavelength isdetermined<br />
by the minimum velocity (v min ), so the accuracy of the system is governed by (v min ).<br />
Following astability analysis, we can derivethe stability requirementhere as:<br />
∆t ≤<br />
1 √<br />
2<br />
∆h<br />
v max<br />
(13)<br />
where v max isthe maximum velocity on the grid.<br />
1.1.1 Exercise1<br />
• Program the 2D acoustic wave <strong>propagation</strong> in standard grid scheme as in Fig. 1<br />
(wave_acoustic_2D.m). Study the wavefield and seismograms with different choicesof<br />
∆t and ∆h anddemonstrate how ∆t and ∆h affectthe stability andgrid dispersion<br />
in the program.<br />
• Introduceheterogeneitiesinthevelocities,suchasathinlayerwithhalfvelocity,and<br />
describethedifferencefromtheisotropicmodel,especiallyhowthislayeraffectsthe<br />
observed seismograms. Run the code with the velocity inside the thin layer being<br />
zeroand explain the result.<br />
1.2 Elasticwave problemwithstaggeredgrid<br />
For 2Delasticwave case (P-SV system), we have the equationsas:<br />
ρ ∂2 u x<br />
∂t 2 = ∂τ xx<br />
∂x + ∂τ xz<br />
∂z , (14)<br />
ρ ∂2 u z<br />
∂t 2 = ∂τ xz<br />
∂x + ∂τ zz<br />
∂z , (15)<br />
τ xx = (λ +2µ) ∂u x<br />
∂x + λ∂u z<br />
∂z , (16)<br />
and<br />
τ zz = (λ +2µ) ∂u z<br />
∂z + λ∂u x<br />
∂x , (17)<br />
( ∂ux<br />
τ xz = µ<br />
∂z + ∂u )<br />
z<br />
. (18)<br />
∂x<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 3
1 WAVEPROPAGATION<br />
Here, (u x ,u z ) are the particle displacements. For seismic waves, they are typically called<br />
radial and vertical components, respectively, if they are recorded at surface. Further, τ is<br />
thestresstensor,and λ(x,z)and µ(x,z)theelastic,Lamécoefficients(µisshearmodulus).<br />
Typically, those equations are solved for particle velocities as u = ∂u x<br />
∂t<br />
and v = ∂u z<br />
∂t . Then,<br />
the system istransformed into the frst-order hyperbolic system:<br />
(<br />
∂u<br />
∂t = b ∂τxx<br />
∂x + ∂τ xz<br />
∂z<br />
(<br />
∂v<br />
∂t = b ∂τxz<br />
∂x + ∂τ zz<br />
∂z<br />
)<br />
, (19)<br />
)<br />
, (20)<br />
∂τ xx<br />
= (λ +2µ) ∂u<br />
∂t<br />
∂x + λ∂v ∂z , (21)<br />
∂τ zz<br />
= (λ +2µ) ∂v<br />
∂t<br />
∂x + λ∂u ∂z , (22)<br />
(<br />
∂τ xz ∂u<br />
= µ<br />
∂t ∂z + ∂v )<br />
. (23)<br />
∂x<br />
Atypicalseismicwave<strong>propagation</strong>problemneedstodealwithmediumwithvariable<br />
Poisson’s ratio, ν, which can be definedas<br />
ν =<br />
λ<br />
2(λ + µ) . (24)<br />
For the special case of λ = µ, ν = 0.25, and many rocks have Poisson’s ratios not far<br />
from 1/4. For liquids, ν → 0.5. For seismic wave <strong>propagation</strong>, this is particularly important<br />
when ocean water or the outer core of the Earth are needed to be considered in the<br />
problem, which ishard to beresolved with the traditional setup ofgrid asin Fig. 1.<br />
To satisfy both requirements for stability and grid dispersion at those problems, a<br />
P-SV staggered-grid scheme is applied. Note the structure of the elastic wave problem,<br />
eq.(19)-eq.(23),theyallowthestressandparticlevelocitytobespatiallyinterlacedonthe<br />
gridsasinFig. 2. Thestaggered-gridschemeallowsthespatialderivativetobecomputed<br />
to a much higher accuracy (e.g. Levander, 1988). (This computational aspect is similar to<br />
the staggered grid finite difference approach to the Stokes problem, discussed in sec. .)<br />
To add the complexity, the stress and velocity field can also staggered in time. Follow<br />
the explicit scheme,the second order difference equationsfor Equation (19)-(23)are:<br />
u k+1/2<br />
i+1/2,j = uk−1/2<br />
v k+1/2<br />
i,j+1/2 = vk−1/2<br />
i+1/2,j +b i+1/2,j<br />
+b i+1/2,j<br />
∆t<br />
∆h<br />
i,j+1/2 +b i,j+1/2<br />
∆t<br />
( )<br />
Σi+1,j k ∆h<br />
− Σk i,j<br />
(<br />
Γi+1/2,j+1/2 k − Γk i+1/2,j−1/2<br />
∆t<br />
(<br />
∆h<br />
+b i,j+1/2<br />
∆t<br />
∆h<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 4<br />
Γi+1/2,j+1/2 k − Γk i−1/2,j+1/2<br />
(<br />
Ξ k i,j+1 − Ξk i,j<br />
)<br />
, (25)<br />
)<br />
)<br />
, (26)
1 WAVEPROPAGATION<br />
Figure2: 2Dstaggeredfinitedifference gridfor wave<strong>propagation</strong>.<br />
i,j<br />
= Σi,j k + (λ +2µ) ∆t<br />
i,j<br />
∆h<br />
∆t<br />
+ λ i,j<br />
∆h<br />
Σ k+1<br />
i,j<br />
= Ξi,j k + (λ +2µ) ∆t<br />
i,j<br />
∆h<br />
∆t<br />
+ λ i,j<br />
∆h<br />
Ξ k+1<br />
(<br />
u k+1/2<br />
i+1/2,j −uk+1/2 i−1/2,j<br />
(<br />
v k+1/2<br />
i,j+1/2 −vk+1/2 i,j−1/2<br />
(<br />
v k+1/2<br />
i,j+1/2 −vk+1/2 i,j−1/2<br />
(<br />
u k+1/2<br />
i+1/2,j −vk+1/2 i−1/2,j<br />
Γ k+1<br />
i+1/2,j+1/2 = Γk i+1/2,j+1/2 + µ i+1/2,j+1/2<br />
∆t<br />
(<br />
∆h<br />
+ µ i+1/2,j+1/2<br />
∆t<br />
∆h<br />
To time-evolve the solution for one full ∆t, wefollow:<br />
1. update velocities from the stress;<br />
2. update the stress from the velocities.<br />
For a homogeneous medium, the stability condition is<br />
)<br />
)<br />
, (27)<br />
)<br />
)<br />
, (28)<br />
v k+1/2<br />
i+1,j+1/2 −vk+1/2 i,j+1/2<br />
(<br />
u k+1/2<br />
i+1/2,j+1 −uk+1/2 i+1/2,j<br />
)<br />
)<br />
. (29)<br />
v P<br />
∆t<br />
∆h < 1 √<br />
2<br />
, (30)<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 5
1 WAVEPROPAGATION<br />
where<br />
v P =<br />
√<br />
λ +2µ<br />
ρ<br />
(31)<br />
isthe P-wave velocity. Thestability condition isindependentof the S-wave velocity<br />
√ µ<br />
v S =<br />
ρ<br />
(32)<br />
because information will propagate atthe P wavespeed.<br />
To minimize the grid dispersion, the spatial sampling required at least 10 gridpoints<br />
per wavelength, which is defined by the v P . For a 4 th -order approach, the sampling rate<br />
can be reduced to5gridpoints/wavelength (Levander, 1988).<br />
Several other issues are alsovery important in wave <strong>propagation</strong> in practice:<br />
1. If a boundary condition is not well implemented, the related reflected waves from<br />
the boundaries of the domain will affect the results strongly. Depending on the<br />
problem, different boundary conditions can be applied to the edges: free-surface<br />
conditions,absorbingboundaries(ClaytonandEngquist,1977),andtherecentlywidelyadopted<br />
Perfectly Matched Layer (PML)absorbing boundary (Collinoand Tsogka,<br />
2001).<br />
2. Thesource excitation, which initializesthewave<strong>propagation</strong>, alsohastobetreated<br />
with care. In general, a source can be implemented by simply adding a prescribed<br />
source time function to the source mesh. For example, an explosion point source<br />
time function S(t) can be addedto the 2Delastic case as:<br />
τ xx or zz (source grid) = τ xx or zz (FD solution at source grid) +S(t)<br />
1.2.1 Exercise2<br />
• Program the 2D elastic wave <strong>propagation</strong> in staggered grid scheme as in Fig. 2<br />
(wave_elastic_staggered_2D.m). Choose ∆t and ∆h and describe the wavefield<br />
(both vertical and horizontal components) for the model with uniform velocities.<br />
Identifythe first P and SV arrivalson the recorded seismograms.<br />
• Include a thin liquid layer (v S = 0) in the model and explain the result. Note for a<br />
typical wave <strong>propagation</strong> problem, the input models are v P , v S , and density ρ, so<br />
the conversions to λ and µ are required in the program.<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 6
BIBLIOGRAPHY<br />
Bibliography<br />
Clayton, R., and H. Engquist (1977), Absorbing boundary conditions for acoustic and<br />
elasticwave equations, Bull. Seismol.Soc. Am.,67, 1529–1540.<br />
Collino, F., and C. Tsogka (2001), Application of the perfectly matched absorbing layer<br />
model to the linear elastodynamic problem in anisotropic heterogeneous media, Geophysics,66,294–307.<br />
Levander, A. R. (1988), Fourth-order finite-difference P-SV seismograms, Geophysics, 53,<br />
1425–1436.<br />
<strong>USC</strong>GEOL557: ModelingEarth Systems 7