
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
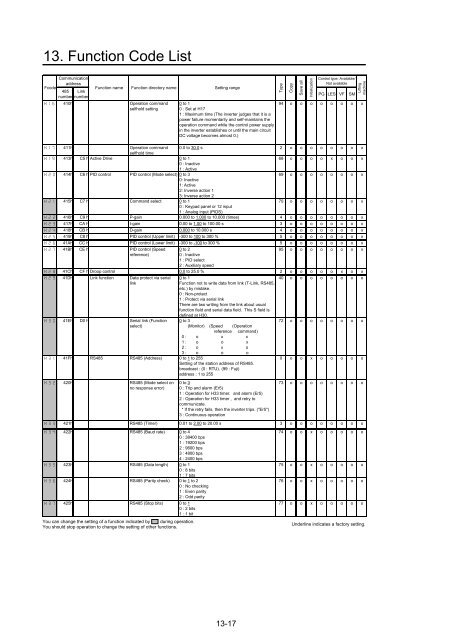
13. Function Code List<br />
Communication<br />
address<br />
Fcode<br />
485 Link<br />
number number<br />
Function name Function directory name<br />
h16 410h Operation command<br />
selfhold setting<br />
0 to 1<br />
0 : Set at H17<br />
1 : Maximum time (The inverter judges that it is a<br />
power failure momentarily and self-maintains the<br />
operation command while the control power supply<br />
in the inverter establishes or until the main circuit<br />
DC voltage becomes almost 0.)<br />
13-17<br />
PG LES VF SM<br />
94 o o o o o o o x<br />
h17 411h Operation command<br />
selfhold time<br />
0.0 to 30.0 s 2 o o o o o o o x<br />
h19 413h C5 h Active Drive 0 to 1<br />
0 : Inactive<br />
1 : Active<br />
68 o o o o x o o x<br />
h20 414h C6 h PID control PID control (Mode select) 0 to 3<br />
0: Inactive<br />
1: Active<br />
2: Inverse action 1<br />
3: Inverse action 2<br />
69 o o o o o o o x<br />
h21 415h C7 h Command select 0 to 1<br />
0 : Keypad panel or 12 input<br />
1 : Analog input (PIDS)<br />
70 o o o o o o o x<br />
h22 416h C9 h P-gain 0.000 to 1.000 to 10.000 (times) 4 o o o o o o o x<br />
h23 417h CA h I-gain 0.00 to 1.00 to 100.00 s 3 o o o o o o o x<br />
h24 418h CB h D-gain 0.000 to 10.000 s 4 o o o o o o o x<br />
h25 419h C8 h PID control (Upper limit) -300 to 100 to 300 % 5 o o o o o o o x<br />
h26 41Ah CC h PID control (Lower limit) -300 to -100 to 300 % 5 o o o o o o o x<br />
h27 41Bh CE h PID control (Speed<br />
reference)<br />
0 to 2<br />
0 : Inactive<br />
1 : PID select<br />
2 : Auxiliary speed<br />
95 o o o o o o o x<br />
h28 41Ch CF h Droop control 0.0 to 25.0 % 2 o o o o o x o x<br />
h29 41Dh Link function Data protect via serial<br />
link<br />
h30 41Eh D0 h Serial link (Function<br />
select)<br />
0 to 1<br />
Function not to write data from link (T-Link, RS485,<br />
etc.) by mistake.<br />
0 : Non-protect<br />
1 : Protect via serial link<br />
There are two writing from the link about usual<br />
function field and serial data field. This S field is<br />
defined at H30.<br />
0 to 3<br />
(Monitor) (Speed (Operation<br />
reference command)<br />
0 : o x x<br />
1 : o o x<br />
2 : o x o<br />
3 : o o o<br />
h31 41Fh RS485 RS485 (Address) 0 to 1 to 255<br />
Setting of the station address of RS485.<br />
broadcast : (0 : RTU),(99 : Fuji)<br />
address : 1 to 255<br />
h32 420h RS485 (Mode select on<br />
no response error)<br />
0 to 3<br />
0 : Trip and alarm (Er5)<br />
1 : Operation for H33 timer, and alarm (Er5)<br />
2 : Operation for H33 timer , and retry to<br />
communicate.<br />
* If the retry fails, then the inverter trips. ("Er5")<br />
3 : Continuous operation<br />
40 o o o o o o o o<br />
72 o o o o o o o o<br />
0 o o x o o o o o<br />
73 o o o o o o o o<br />
h33 421h RS485 (Timer) 0.01 to 2.00 to 20.00 s 3 o o o o o o o o<br />
h34 422h RS485 (Baud rate) 0 to 4<br />
0 : 38400 bps<br />
1 : 19200 bps<br />
2 : 9600 bps<br />
3 : 4800 bps<br />
4 : 2400 bps<br />
h35 423h RS485 (Data length) 0 to 1<br />
0 : 8 bits<br />
1 : 7 bits<br />
h36 424h RS485 (Parity check) 0 to 1 to 2<br />
0 : No checking<br />
1 : Even parity<br />
2 : Odd parity<br />
h37 425h RS485 (Stop bits) 0 to 1<br />
0 : 2 bits<br />
1 : 1 bit<br />
You can change the setting of a function indicated by during operation.<br />
You should stop operation to change the setting of other functions.<br />
Setting range<br />
Type<br />
Copy<br />
Save all<br />
Initialization<br />
Control type: Available/<br />
Not available<br />
Lifting<br />
machine<br />
74 o o x o o o o o<br />
75 o o x o o o o o<br />
76 o o x o o o o o<br />
77 o o x o o o o o<br />
Underline indicates a factory setting.