MELSERVO-J3 New Product News
MELSERVO-J3 New Product News
MELSERVO-J3 New Product News

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>New</strong> <strong>Product</strong> <strong>New</strong>s<br />
General-Purpose AC Servo<br />
<strong>MELSERVO</strong>-<strong>J3</strong><br />
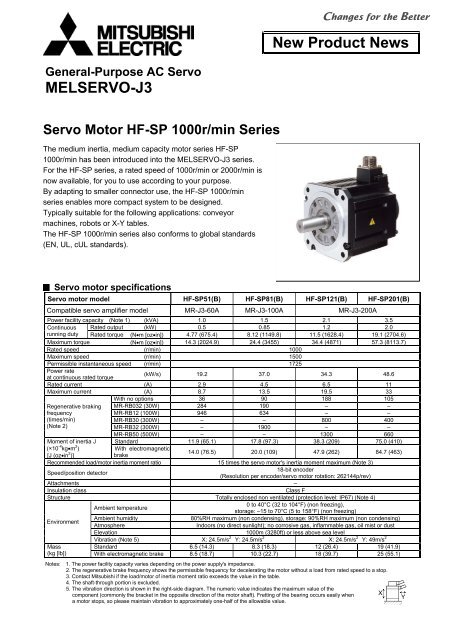
Servo Motor HF-SP 1000r/min Series<br />
The medium inertia, medium capacity motor series HF-SP<br />
1000r/min has been introduced into the <strong>MELSERVO</strong>-<strong>J3</strong> series.<br />
For the HF-SP series, a rated speed of 1000r/min or 2000r/min is<br />
now available, for you to use according to your purpose.<br />
By adapting to smaller connector use, the HF-SP 1000r/min<br />
series enables more compact system to be designed.<br />
Typically suitable for the following applications: conveyor<br />
machines, robots or X-Y tables.<br />
The HF-SP 1000r/min series also conforms to global standards<br />
(EN, UL, cUL standards).<br />
Servo motor specifications<br />
Servo motor model HF-SP51(B) HF-SP81(B) HF-SP121(B) HF-SP201(B)<br />
Compatible servo amplifier model MR-<strong>J3</strong>-60A MR-<strong>J3</strong>-100A MR-<strong>J3</strong>-200A<br />
Power facility capacity (Note 1) (kVA) 1.0 1.5 2.1 3.5<br />
Continuous Rated output (kW) 0.5 0.85 1.2 2.0<br />
running duty Rated torque (N•m [oz•in]) 4.77 (675.4) 8.12 (1149.8) 11.5 (1628.4) 19.1 (2704.6)<br />
Maximum torque (N•m [oz•in]) 14.3 (2024.9) 24.4 (3455) 34.4 (4871) 57.3 (8113.7)<br />
Rated speed (r/min) 1000<br />
Maximum speed (r/min) 1500<br />
Permissible instantaneous speed (r/min) 1725<br />
Power rate<br />
at continuous rated torque<br />
(kW/s) 19.2 37.0 34.3 48.6<br />
Rated current (A) 2.9 4.5 6.5 11<br />
Maximum current (A) 8.7 13.5 19.5 33<br />
With no options 36 90 188 105<br />
Regenerative braking MR-RB032 (30W) 284 190 – –<br />
frequency<br />
MR-RB12 (100W) 946 634 – –<br />
(times/min)<br />
MR-RB30 (300W) – – 800 400<br />
(Note 2)<br />
MR-RB32 (300W) – 1900 – –<br />
MR-RB50 (500W) – – 1300 660<br />
Moment of inertia J Standard 11.9 (65.1) 17.8 (97.3) 38.3 (209) 75.0 (410)<br />
(×10 -4 kg•m 2 )<br />
With electromagnetic<br />
[J (oz•in 2 )]<br />
brake<br />
14.0 (76.5) 20.0 (109) 47.9 (262) 84.7 (463)<br />
Recommended load/motor inertia moment ratio 15 times the servo motor's inertia moment maximum (Note 3)<br />
Speed/position detector<br />
18-bit encoder<br />
(Resolution per encoder/servo motor rotation: 262144p/rev)<br />
Attachments –<br />
Insulation class<br />
Class F<br />
Structure Totally enclosed non ventilated (protection level: IP67) (Note 4)<br />
Ambient temperature<br />
0 to 40°C (32 to 104°F) (non freezing),<br />
storage: –15 to 70°C (5 to 158°F) (non freezing)<br />
Environment<br />
Ambient humidity<br />
80%RH maximum (non condensing), storage: 90%RH maximum (non condensing)<br />
Atmosphere<br />
Indoors (no direct sunlight); no corrosive gas, inflammable gas, oil mist or dust<br />
Elevation<br />
1000m (3280ft) or less above sea level<br />
Vibration (Note 5) X: 24.5m/s 2 Y: 24.5m/s 2 X: 24.5m/s 2 Y: 49m/s 2<br />
Mass<br />
Standard 6.5 (14.3) 8.3 (18.3) 12 (26.4) 19 (41.9)<br />
(kg [lb]) With electromagnetic brake 8.5 (18.7) 10.3 (22.7) 18 (39.7) 25 (55.1)<br />
Notes: 1. The power facility capacity varies depending on the power supply's impedance.<br />
2. The regenerative brake frequency shows the permissible frequency for decelerating the motor without a load from rated speed to a stop.<br />
3. Contact Mitsubishi if the load/motor of inertia moment ratio exceeds the value in the table.<br />
4. The shaft-through portion is excluded.<br />
5. The vibration direction is shown in the right-side diagram. The numeric value indicates the maximum value of the<br />
component (commonly the bracket in the opposite direction of the motor shaft). Fretting of the bearing occurs easily when X<br />
a motor stops, so please maintain vibration to approximately one-half of the allowable value.<br />
Y
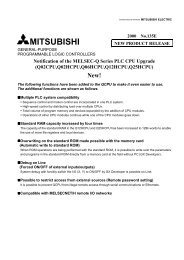
Servo motor torque characteristics<br />
HF-SP51(B) (Note 1,2) HF-SP81(B) (Note 1) HF-SP121(B) (Note 1) HF-SP201(B) (Note 1)<br />
Torque (oz in)<br />
2100<br />
1400<br />
700<br />
0<br />
Torque (N m)<br />
15<br />
10<br />
5<br />
0<br />
Peak<br />
running range<br />
Continuous<br />
running range<br />
500 1000<br />
Speed (r/min)<br />
Torque (oz in)<br />
4200<br />
2800<br />
Torque (N m)<br />
30<br />
20<br />
Peak<br />
running range<br />
Torque (oz in)<br />
5600<br />
4200<br />
2800<br />
Torque (N m)<br />
40<br />
30<br />
20<br />
Peak<br />
running range<br />
1400 10<br />
2800 20<br />
1400 10<br />
Continuous<br />
Continuous<br />
Continuous<br />
running range<br />
running range<br />
running range<br />
0<br />
0<br />
0<br />
1500 0 500 1000 1500 0 500 1000 1500<br />
0 500 1000 1500<br />
Speed (r/min) Speed (r/min) Speed (r/min)<br />
Torque (oz in)<br />
8400<br />
5600<br />
Torque (N m)<br />
60<br />
40<br />
Peak<br />
running range<br />
Notes: 1. : For 3-phase 200VAC.<br />
2. : For 1-phase 230VAC.<br />
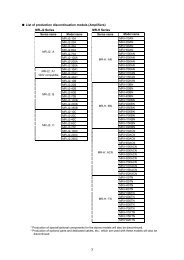
Servo motor dimensions<br />
HF-SP51(B), HF-SP81(B)<br />
(Note 3)<br />
(Note 3)<br />
(Note 3)<br />
79.9(3.15)<br />
(Note 3)<br />
50.9(2.00)<br />
13<br />
(0.51)<br />
Encoder connector<br />
CM10-R10P<br />
Brake connector<br />
CM10-R2P (Note 3)<br />
L<br />
38.2(1.5)<br />
<br />
55(2.17)<br />
50(1.97)<br />
12(0.47) 3(0.12)<br />
(Note 3)<br />
59(2.32)<br />
(Note 3)<br />
(Note 3)<br />
20.9(0.82)<br />
(Note 3)<br />
Brake<br />
(Note 3)<br />
(Note 3)<br />
KL<br />
Power supply connector<br />
MS3102A18-10P<br />
W<br />
V<br />
24h6<br />
0<br />
( 0.9449 0.0005 )<br />
C<br />
B<br />
110h7<br />
D<br />
A<br />
0<br />
( 4.331 0.0014 )<br />
4- 9 (0.354) mounting hole<br />
Use hexagonal cap head bolts.<br />
112.5(4.43)<br />
U<br />
13.5<br />
(0.53)<br />
Earth<br />
130(5.12)<br />
58<br />
(2.28)<br />
45<br />
29(1.14)<br />
(Note 3)<br />
165(6.496)<br />
145(5.709)<br />
Model<br />
HF-SP51(B)<br />
HF-SP81(B)<br />
Variable dimensions<br />
L<br />
140.5(5.53)<br />
<br />
162.5(6.4)<br />
<br />
KL<br />
79.8<br />
(3.14)<br />
101.8<br />
(4.01)<br />
Unit:mm (inch)<br />
Brake static<br />
friction torque<br />
(N⋅m [oz⋅in])<br />
8.5(1203)<br />
8.5(1203)<br />
Brake connector pin assignment<br />
Motor flange direction<br />
Power supply connector pin assignment<br />
Motor flange direction<br />
HF-SP121(B), HF-SP201(B)<br />
4- 13.5(0.531) mounting hole<br />
Use hexagonal cap head bolts.<br />
Unit:mm (inch)<br />
(Note 3)<br />
44(1.73)<br />
(Note 3)<br />
(Note 3)<br />
(Note 3)<br />
50.9(2.00)<br />
96.9(3.81)<br />
(Note 3)<br />
38.5(1.52)<br />
18(0.71)<br />
<br />
(Note 3)<br />
13<br />
(0.51)<br />
66.5<br />
(2.62)<br />
(Note 3)<br />
Encoder connector<br />
CM10-R10P<br />
Brake connector<br />
CM10-R2P (Note 3)<br />
(Note 3)<br />
Brake<br />
(Note 3)<br />
L<br />
24.8(0.98)<br />
KL<br />
79(3.11)<br />
75(2.95)<br />
3(0.12)<br />
35 0.010<br />
0<br />
Power supply connector<br />
MS3102A22-22P<br />
W<br />
V<br />
0.0004<br />
( 1.3780 0 )<br />
C<br />
B<br />
114.3 0 0.025<br />
0<br />
( 4.5<br />
0.0010<br />
)<br />
D<br />
A<br />
U<br />
140.9(5.55)<br />
Earth<br />
176(6.93)<br />
82<br />
(3.23)<br />
45<br />
200(7.874)<br />
230(9.055)<br />
Model<br />
HF-SP121(B) 143.5(5.65)<br />
<br />
HF-SP201(B) 183.5(7.22)<br />
<br />
Variable dimensions<br />
L<br />
KL<br />
79.8<br />
(3.14)<br />
119.8<br />
(4.72)<br />
Brake static<br />
friction torque<br />
(N⋅m [oz⋅in])<br />
44(6230)<br />
44(6230)<br />
Brake connector pin assignment<br />
Motor flange direction<br />
Power supply connector pin assignment<br />
Motor flange direction<br />
Notes: 1. Use a friction coupling to fasten a load.<br />
2. Dimensions inside < > are for the models with electromagnetic brake.<br />
3. Only for the models with electromagnetic brake.<br />
4. For dimensions where there is no tolerance listed, use general tolerance.<br />
MEE(0412)