How we build reality - Z+F USA, Inc.
How we build reality - Z+F USA, Inc.
How we build reality - Z+F USA, Inc.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
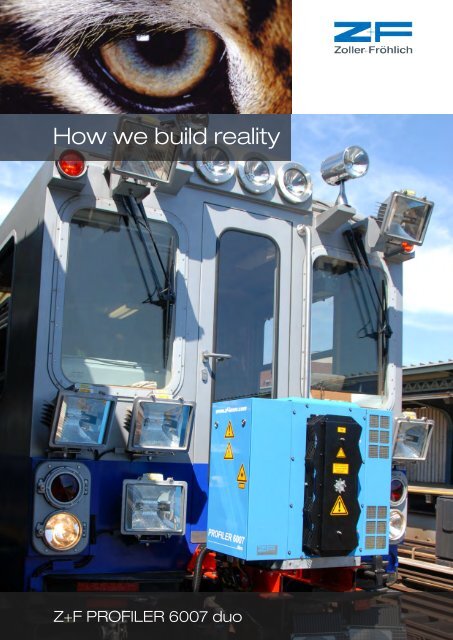
<strong>How</strong> <strong>we</strong> <strong>build</strong> <strong>reality</strong><br />
<strong>Z+F</strong> PROFILER 6007 duo
<strong>Z+F</strong> PROFILER 6007 duo<br />
The high-speed laser scanning<br />
system <strong>Z+F</strong> PROFILER 6007<br />
duo is one of Zoller + Fröhlich’s<br />
most innovative developments<br />
in the field of 2D laser<br />
scanning.<br />
The <strong>Z+F</strong> PROFILER 6007 duo is the<br />
perfect tool for high-precision<br />
surveying, inspection and analysis<br />
of short or long tracks with high<br />
resolutions at high velocities. It is<br />
specially engineered and optimized<br />
for those applications<br />
where gathering data fast and<br />
efficiently is required like for<br />
example in the rail industry.<br />
Due to its high performance level,<br />
measurements can be made without<br />
taking possession of the track,<br />
impairing other rail traffic and jeopardizing<br />
personnel and equipment.<br />
Mounted onto a moving carrier<br />
vehicle, accurate topographic<br />
measurements of whole railway<br />
systems can be captured within a<br />
short space of time.<br />
The captured two-dimensional<br />
data can then be processed into<br />
absolute three-dimensional Cartesian<br />
coordinates, using data of<br />
additional sensors such as GPS or<br />
Inertial Navigation Sensors (INS).<br />
This highly accurate information<br />
can then be used for numerous<br />
further applications, like for<br />
example clearance analysis or<br />
virtual <strong>reality</strong> reviews.<br />
2
Fast, rugged, highly-accurate<br />
Areas of application Key characteristics Laser scanning principle<br />
· Clearance analysis<br />
- Analysing the whole infrastructure<br />
and the surroundings<br />
of the driven track axis<br />
- Analysing tunnels/tunnel<br />
walls<br />
- Analysing platform edges<br />
- Detecting clearance infringements<br />
- Testing railroad clearances<br />
when operating oversized<br />
loads<br />
· Inventory survey (2D/2.5D/3D)<br />
· Documentation and analysis of<br />
the railroad network/system<br />
· Ballast profile documentation<br />
· Creating a planning basis for<br />
reconstruction work or deployment<br />
of new trains/vehicles<br />
· Virtual Reality (2.5D/3D)<br />
· Full 360 ° field of view<br />
(no shadowing effects)<br />
· Doubled laser scan performance<br />
due to the integration of<br />
two laser scanning systems<br />
synchronized in a single casing<br />
("single device design"):<br />
- 500 rot./sec., i.e.<br />
cross-sections (effective)<br />
- Data acquisition rate of<br />
1,016,000 pixel/sec.<br />
(effective)<br />
· User-definable horizontal and<br />
vertical resolutions<br />
· Interfaces for synchronization<br />
with navigation sensors<br />
· Ethernet interface for data<br />
transfer and communication<br />
· Extreme high ruggedness and<br />
stability due to its compact<br />
architecture<br />
· High security level (et al. safety<br />
cover for the rotating laser<br />
heads, emergency-stop mechanism,<br />
laser safety class 3R)<br />
In order to take measurements<br />
along a specified track, the<br />
<strong>Z+F</strong> PROFILER 6007 duo must be<br />
mounted onto a carrier platform<br />
of a moving vehicle. The two<br />
integrated laser scanning systems<br />
measure helix-shaped scan<br />
lines of the surrounding surface.<br />
A measurement consists of an<br />
angle and a distance which is<br />
determined recording the phase<br />
difference bet<strong>we</strong>en emitted and<br />
reflected laser beam.<br />
The rotation speed of the two<br />
laser scanning systems and the<br />
velocity of the carrier vehicle<br />
define the density of measurements<br />
(vertical and horizontal<br />
spacing bet<strong>we</strong>en scanned<br />
points).<br />
· System adaptable to customer<br />
requirements<br />
Source: Amberg Technologies<br />
3
<strong>Z+F</strong> PROFILER 6007 duo<br />
Data acquisition<br />
Due to the two laser scanning<br />
systems, the overall system<br />
performance is doubled, allowing<br />
the carrier vehicle to travel with<br />
high velocities on the railway net,<br />
still maintaining high scan<br />
resolutions and point densities.<br />
Both laser scanning systems are<br />
synchronized to be able to<br />
achieve a data acquisition rate<br />
of 2 x 508,000 pixels per second<br />
with 2,048 points per captured<br />
profile.<br />
The horizontal and vertical resolutions bet<strong>we</strong>en two consecutive crosssections<br />
depend on the driven speed:<br />
Speed v<br />
[km/h]/[mp/h]<br />
Rotations per<br />
second<br />
[rps]<br />
Max. no. of<br />
points per<br />
cross-section<br />
Horizontal<br />
resolution 1)<br />
[mm]<br />
50/31 500 2048 27,8 10,7<br />
20/12 500 2048 11,2 10,7<br />
10/6 500 2048 5,6 10,7<br />
5/3 500 2048 2,8 10,7<br />
1) distance bet<strong>we</strong>en two consecutive measured cross-sections<br />
Vertical resolution at a<br />
distance of 3.5 m to<br />
the scanner-center 2)<br />
[mm]<br />
2) distance bet<strong>we</strong>en two consecutive measured points within one cross-section<br />
on a surface which is perpendicular to the measuring direction of the laser beam<br />
Synchronization and absolute<br />
positioning<br />
For kinematic laser scanning the<br />
carrier-vehicle's driven trajectory<br />
needs to be determined, using<br />
external navigation sensors. With<br />
this information the captured<br />
two-dimensional measurements<br />
can be processed into georeferenced,<br />
absolute three-dimensional<br />
Cartesian coordinates.<br />
Since those external navigation<br />
sensors are not defined in a<br />
common standard, they are not<br />
integrated in the <strong>Z+F</strong> PROFILER<br />
6007 duo.<br />
Therefore suitable interfaces for<br />
external synchronisation signals<br />
are provided.<br />
Sensor data as <strong>we</strong>ll as scan data<br />
are recorded with unique identifiers<br />
(time stamps or distance<br />
stamps) to be able to synchronize<br />
both data streams.<br />
4
Mechanical system overview<br />
The <strong>Z+F</strong> PROFILER 6007 duo’s<br />
integrated laser scanning systems<br />
are each controlled by a<br />
seperate laser-PC. The bi-directional<br />
communication, as <strong>we</strong>ll as<br />
data storage onto removable<br />
HDD is realized via LAN-<br />
/Ethernet-connection.<br />
External navigation sensors for<br />
later data synchronisation can<br />
either be connected to the laser<br />
scanner directly via a RS422<br />
interface or via Ethernet.<br />
In addition to the <strong>Z+F</strong> PROFILER<br />
6007 duo a suitable industrial PC<br />
for Profiler-control is required.<br />
While the <strong>Z+F</strong> PROFILER 6007<br />
duo has to be mounted on a fix<br />
platform outside the carrier<br />
vehicle, the industrial PC is<br />
installed inside.<br />
High speed laser scanner and<br />
industrial PC are both provided by<br />
Zoller + Fröhlich.<br />
For po<strong>we</strong>r supply the high-speed<br />
laser scanner is connected to the<br />
train’s po<strong>we</strong>r system.<br />
<strong>Z+F</strong> PROFILER 6007 duo<br />
Laser scanner 1<br />
Laser-PC 1<br />
Higher level<br />
custom control<br />
unit<br />
Ethernet<br />
Laser scanner 2<br />
Laser-PC 2<br />
AC-Po<strong>we</strong>r<br />
Ethernet<br />
RS422<br />
interface<br />
(footpulse,<br />
odometer...)<br />
Industrial PC<br />
(runs capturing<br />
software)<br />
Navigation Sensors<br />
Removable HDD<br />
Schematic system overview<br />
5
Software<br />
Zoller + Fröhlich offers already tailor-made capturing and<br />
processing software solutions. This software was developed<br />
in partnership with railway experts from Amberg Technologies<br />
(AT). They have intensive business know-how in the railway<br />
industry and offer various software-packages to process and<br />
evaluate laser scan data in this domain.<br />
Already during the scanning<br />
process, the captured local data<br />
is referenced to the centerline<br />
of the running track using<br />
automatic railhead detection<br />
and can be displayed on screen<br />
in realtime.<br />
Capturing<br />
The <strong>Z+F</strong> PROFILER 6007 duo is<br />
operated by a central capturingsoftware,<br />
which is required to<br />
forward commands and data to<br />
the two laser scanning systems<br />
and vice versa.<br />
In addition to the communication<br />
with the <strong>Z+F</strong> PROFILER 6007 duo<br />
the following tasks are performed:<br />
· Controlling the two laser<br />
scanning systems (parameters,<br />
etc.)<br />
· Continuous data transfer and<br />
storage (e.g. onto USB-hard<br />
drives)<br />
· Real-time creation/calculation<br />
of composite cross-sections as<br />
<strong>we</strong>ll as referencing them to the<br />
centerline of the running track<br />
· Automatic railhead detection<br />
· Regularly checking and logging<br />
the status of the scanner<br />
system<br />
Processing<br />
The entire data processing is<br />
performed in the office. Before<br />
viewing, analyzing and exporting<br />
the captured laser scan data,<br />
suitable software is used for<br />
preprocessing:<br />
· Combining the scanner raw<br />
data of both laser scanners and<br />
converting it to the track centerline<br />
aligned point clouds<br />
· Storing the scanned data in a<br />
standardized data format.<br />
For the actual processing,<br />
Amberg’s software products can<br />
be used for:<br />
· Filing of processed scan data in<br />
project-format<br />
· Extensive functions and possibilities<br />
to process, view, evaluate<br />
and analyse the data<br />
· Interfaces for data import and<br />
export<br />
Both capturing as <strong>we</strong>ll as processing software can be customized<br />
individually. Relevant interfaces for synchronization and customerspecific<br />
workflows can be respected.<br />
6
Results<br />
Results<br />
· Extraction of local and/or global<br />
coordinates:<br />
- Raw scan data<br />
- Scan data, synchronized<br />
and referenced to the<br />
centerline of the running<br />
track<br />
- Absolute 3D scan data<br />
· Profile-extraction<br />
- Extraction and storage of<br />
profiles and cross-sections<br />
(minimum profiles in predefined<br />
intervals)<br />
· Clearance-analysis<br />
- Calculation of single profiles<br />
(numeric information)<br />
- Clearance-analysis on the<br />
basis of the absolute<br />
rail geometry/driven 3D-trajectory<br />
Amberg Rail: Visual Tunnel Map, Offboard<br />
Amberg Rail: Combined View (Clearence Map and Cross-Cut), Offboard<br />
7
Results<br />
Results<br />
· Various display-possibilities<br />
(depending on the available<br />
information):<br />
- 2D view of processed<br />
composite cross-cuts,<br />
including clearance profile<br />
- 3D view of scan data<br />
including clearance<br />
information<br />
- Unwrapped view of data<br />
including clearance<br />
information<br />
· Virtual <strong>reality</strong> reviews, showing<br />
the results of the measuring run<br />
in a pseudo '3D view', based on<br />
the available information:<br />
- Reflectivity information<br />
- 2.5D or 3D information<br />
- Clearance information<br />
· Data export in various standardized<br />
formats (pts, ptx, dwg,<br />
dxf, bmp, tif,…)<br />
Amberg Rail: 3D-View, Offboard<br />
8
Reference<br />
Reference<br />
Metropolitan Transportation<br />
Authority (MTA), NY, <strong>USA</strong><br />
As the operator of the biggest<br />
transportation network in North<br />
America, MTA is responsible for<br />
the whole public railway traffic in<br />
New York City.<br />
The total length of the NY subway<br />
system covers approximately<br />
more than 2,057 miles and it<br />
serves more than 734 stations.<br />
In 2009 the first tailor-made<br />
<strong>Z+F</strong> PROFILER 6007 duo was<br />
installed successfully at MTA.<br />
Since then <strong>Z+F</strong>'s high-speed<br />
laser scanner has been used<br />
regularly.<br />
Main applications at MTA are<br />
clearance analysis and 3D<br />
inventory survey.<br />
MTA symbol ® and Subway Map © Metropolitan Transportation Authority. Used with permission.<br />
(In the picture the laser scanner system is the blue box.)<br />
9
Technical datasheet<br />
Laser measurement system<br />
Methode<br />
Ambiguity interval<br />
Min. range<br />
Resolution range<br />
Data acquisition rate<br />
Linearity error up to 50 m 1<br />
<strong>Z+F</strong> PROFILER 6007 duo<br />
Phase-shift<br />
79 m<br />
1.3 m<br />
0.1 mm<br />
2 x ≤ 508,000 pixel/sec.<br />
≤ 2 mm<br />
Range noise black 10 % grey 20 % white 100 %<br />
Range noise at 5 m 1,2,3 4.0 mm rms 2.5 mm rms 1.0 mm rms<br />
Range noise at 10 m 1,2,3 6.0 mm rms 3.0 mm rms 1.5 mm rms<br />
Range noise at 25 m 1,2,3 16.0 mm rms 9.0 mm rms 3.0 mm rms<br />
Range drift over temperature<br />
Negligible due to internal reference<br />
Optical transceiver<br />
Laser visible<br />
Beam divergence<br />
0.22 mrad<br />
Beam diameter at 1 m distance 3 mm<br />
Laser safety class 3R (ISO EN 60825-1)<br />
Deflection unit<br />
Laser deflection system<br />
Rotating mirror<br />
Field of view vertical 360°<br />
Resolution vertical 0.18° (at 250 rps scanning speed)<br />
Accuracy<br />
± 0.07° rms<br />
Max. scanning speed 2 x ≤ 250 rps<br />
Miscellaneous<br />
Data storage<br />
Data interface<br />
Communication interface<br />
External HDD<br />
Ethernet<br />
Ethernet<br />
10
Po<strong>we</strong>r supply<br />
Input voltage<br />
Po<strong>we</strong>r consumption<br />
2 x 3 x 400 V AC, 15 A (per scanner)<br />
2 x 24 V, 10 A DC (per measurement and control unit)<br />
24 V, 20 A DC (cooling system)<br />
5 kVA<br />
Ambient conditions<br />
Operating temperature -10 °C ... +45 °C<br />
Storage temperature -20 °C ... +50 °C<br />
Humidity/air<br />
Illumination<br />
Non-condensing, no rain/snow/hail/visible dust in the air<br />
Scanning possible during day and night<br />
Dimensions and <strong>we</strong>ight<br />
Scanner (w/d/h)<br />
Weight<br />
775 mm x 470 mm x 750 mm<br />
140 kg<br />
1) Detailed explanation on request - please contact info@zf-laser.com<br />
2) Max. data aquisition rate: 508,000 pixel/sec., 2 sigma range noise<br />
3) Lambertian retro reflector<br />
11
Head office – Germany<br />
Zoller + Fröhlich GmbH<br />
Simoniusstraße 22<br />
88239 Wangen im Allgäu<br />
Germany<br />
Phone: +49 7522 9308-0<br />
Fax: +49 7522 9308-252<br />
www.zf-laser.com<br />
info@zf-laser.com<br />
Subsidiary – UK<br />
<strong>Z+F</strong> UK Ltd.<br />
5 Avocado Court<br />
Commerce Way<br />
Trafford Park<br />
Manchester M17 1HW<br />
UK<br />
Phone: +44 161 8690 450<br />
Fax: +44 161 8690 451<br />
www.zf-uk.com<br />
info@zf-uk.com<br />
Subsidiary – <strong>USA</strong><br />
<strong>Z+F</strong> <strong>USA</strong>, <strong>Inc</strong>.<br />
700 Old Pond Road<br />
Suite 606<br />
Bridgeville, PA 15017<br />
<strong>USA</strong><br />
Phone: +1 412 2578 575<br />
Fax: +1 412 2578 576<br />
www.zf-usa.com<br />
info@zf-usa.com<br />
02/2011 | www.zf-laser.com<br />
© 2011 Copyright Zoller + Fröhlich GmbH. All rights reserved. The information contained herein may not be reproduced – in whole or in part – without prior written permission<br />
from Zoller + Fröhlich GmbH. Subject to errors and technical amendments.