電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学
電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学
電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
機 の 場 合 , 発 電 機 内 部 力 率 を 1 とすることで, 最 大 効 率 と<br />
なるが, 一 方 , 非 突 極 形 永 久 磁 石 同 期 電 動 機 の 場 合 , 最 大<br />
効 率 を 得 るには,リラクタンストルクを 考 慮 して 電 流 指 令<br />
を 決 定 する。 電 流 制 御 器 はフィルタコンデンサと 同 期 リア<br />
クタンスの 共 振 による 発 電 機 電 流 の 振 動 を 抑 制 しなければ<br />
ならない。そこで, 以 下 に PID 制 御 における 発 電 機 電 流 の<br />
安 定 化 について 考 察 する。<br />
図 5 より, 発 電 機 電 流 指 令 I * in (s)から 発 電 機 電 流 I in (s)まで<br />
の 伝 達 関 数 を 求 めると,(4) 式 が 得 られる。<br />
K K<br />
d 2 p Ki<br />
s + s +<br />
I L<br />
in<br />
xC<br />
f<br />
LxC<br />
f<br />
LxC<br />
f<br />
=<br />
.........................(4)<br />
*<br />
I<br />
K<br />
in<br />
K 1+<br />
3 d 2<br />
p Ki<br />
s + s + s +<br />
L C L C L C<br />
x<br />
f<br />
x<br />
f<br />
ただし,K i は 積 分 ゲインで,K i =K p /T i ,K d は 微 分 ゲインで<br />
K d =K p T d である。<br />
K i =0,K d =0(P 制 御 )のとき,(4) 式 は, 分 母 に 一 次 の s 項 が<br />
現 れないため, 制 動 係 数 がゼロであることが 明 らかである。<br />
また,これに 積 分 器 を 加 え(K i ≠0)PI 制 御 とした 場 合 も, 二<br />
次 の s 項 が 現 れないため,ラウス・フルビッツの 安 定 条 件 を<br />
満 たせず,PI 制 御 でも 安 定 化 できない。しかし,K i =0 でも<br />
K d を 追 加 することによって(PD 制 御 ), 一 次 の s 項 が 現 れ,<br />
制 動 係 数 を 設 定 できる。よって, 回 転 座 標 上 で 構 成 される<br />
発 電 機 電 流 制 御 系 において,K d は 安 定 性 を 確 保 し,K i は 定<br />
常 偏 差 をなくす 働 きがあることがわかる。<br />
(4) 式 より 提 案 法 の 状 態 方 程 式 を 導 出 し,(5),(6) 式 を 得 る。<br />
ただし,x 1 ,x 2 ,x 3 ,は(4) 式 より 状 態 方 程 式 を 導 出 する 際 に<br />
生 じる, 各 積 分 項 に 対 応 した 状 態 変 数 である。<br />
⎡<br />
⎡x1<br />
⎤ ⎢ 0<br />
⎢ ⎥ ⎢<br />
p<br />
⎢<br />
x2<br />
⎥<br />
= ⎢ 0<br />
⎢x<br />
⎥ ⎢ Ki<br />
⎣ 3 ⎦ ⎢<br />
⎣<br />
LxC<br />
f<br />
1<br />
0<br />
1+<br />
K<br />
L C<br />
x<br />
f<br />
p<br />
0<br />
1<br />
K<br />
d<br />
L C<br />
x<br />
f<br />
x<br />
f<br />
⎤<br />
⎥⎡x1<br />
⎤ ⎡0⎤<br />
⎥⎢<br />
⎥ ⎢ ⎥ *<br />
⎥⎢<br />
x2<br />
⎥<br />
+<br />
⎢<br />
0<br />
⎥<br />
iin<br />
.............(5)<br />
⎥⎢<br />
⎣x<br />
⎥ ⎢<br />
3 ⎦ ⎣1⎥<br />
⎥ ⎦<br />
⎦<br />
⎡x1<br />
⎤<br />
⎡ K K<br />
⎤<br />
i<br />
p K<br />
d ⎢ ⎥<br />
iin = ⎢−<br />
− − ⎥⎢<br />
x2<br />
⎥ .......................(6)<br />
⎢⎣<br />
LxC<br />
f<br />
LxC<br />
f<br />
LxC<br />
f ⎥⎦<br />
⎢<br />
⎣x<br />
⎥<br />
3 ⎦<br />
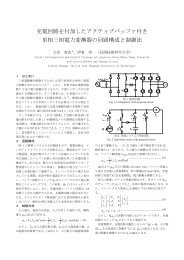
(5) 式 を 用 いて,PI 制 御 ,PID 制 御 での 根 軌 跡 を 比 較 し,<br />
※ なお, 磁 極 位 置 センサが 何 らかの 理 由 で 使 用 できない 場 合 は,<br />
位 相 情 報 は 発 電 機 の 発 電 機 電 流 と 発 電 機 の 端 子 電 圧 , 発 電 機<br />
の 同 期 リアクタンス L x , 及 び, 発 電 機 の 運 転 周 波 数 より 推 定<br />
が 可 能 である。<br />
微 分 要 素 の 働 きを 定 量 的 に 評 価 する。<br />
図 7 に(5) 式 における, 比 例 ゲイン K p =0.1, 積 分 時 間<br />
T i =1ms, 微 分 時 間 T d =1ms としたときの PI 制 御 ,および PID<br />
制 御 の 根 配 置 を 示 す。PI 制 御 では 根 配 置 の 実 部 が 正 となり,<br />
かつ, 虚 数 部 の 値 が 大 きいため, 振 動 的 で 不 安 定 となる。<br />
これは,PI 制 御 においては, 制 動 係 数 の 項 が 存 在 しないた<br />
めである。 対 して,PID 制 御 の 場 合 ,すべての 根 の 実 部 が 負<br />
となり 安 定 となる。これは, 微 分 要 素 を 追 加 することで 制<br />
動 係 数 の 項 が 出 現 し, 制 動 係 数 を 設 定 できることを 表 す。<br />
以 上 より,PID 制 御 によって 入 力 フィルタの 共 振 現 象 を 抑 制<br />
できることがわかった。また, 図 7 より, 応 答 と 安 定 性 が<br />
所 望 の 値 になるように 各 根 を 配 置 することで 比 例 ゲイン,<br />
積 分 時 間 , 微 分 時 間 を 設 計 できる。 本 稿 では, 図 7 の 虚 軸<br />
の 最 近 傍 の 根 に 対 して 安 定 性 を 検 討 する。 最 近 傍 の 根 配 置<br />
と 二 次 標 準 形 の 式 を 比 較 することで 減 衰 係 数 を 近 似 的 に 計<br />
算 できる。 二 次 系 では, 根 が 原 点 から±45deg に 位 置 すると<br />
き, 減 衰 係 数 が 0.7 となる。そこで, 本 稿 では 根 軌 跡 から,<br />
減 衰 係 数 が 0.7 となるように 微 分 時 間 を 調 整 し,1ms と 設 定<br />
した。<br />
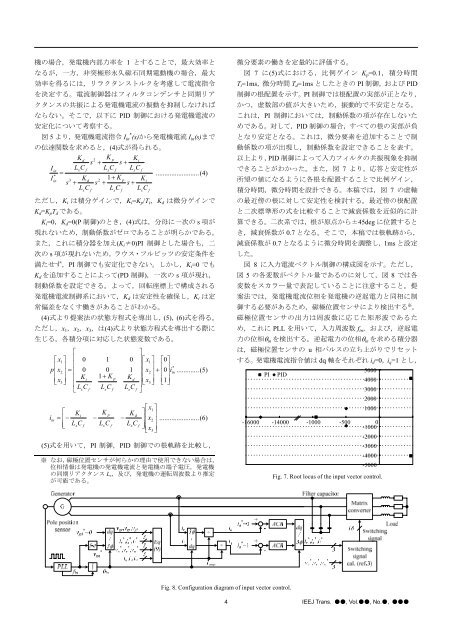
図 8 に 入 力 電 流 ベクトル 制 御 の 構 成 図 を 示 す。ただし,<br />
図 5 の 各 変 数 がベクトル 量 であるのに 対 して, 図 8 では 各<br />
変 数 をスカラー 量 で 表 記 していることに 注 意 すること。 提<br />
案 法 では, 発 電 機 電 流 位 相 を 発 電 機 の 逆 起 電 力 と 同 相 に 制<br />
御 する 必 要 があるため, 磁 極 位 置 センサにより 検 出 する ※ 。<br />
磁 極 位 置 センサの 出 力 は 周 波 数 に 応 じた 矩 形 波 であるた<br />
め,これに PLL を 用 いて, 入 力 周 波 数 f in ,および, 逆 起 電<br />
力 の 位 相 θ in を 検 出 する。 逆 起 電 力 の 位 相 θ in を 求 める 積 分 器<br />
は, 磁 極 位 置 センサの u 相 パルスの 立 ち 上 がりでリセット<br />
する。 発 電 機 電 流 指 令 値 は dq 軸 をそれぞれ i d =0,i q =1 とし,<br />
5000<br />
PI PID<br />
4000<br />
3000<br />
2000<br />
1000<br />
-16000 -14000 -1000 -500 0<br />
-1000<br />
-2000<br />
-3000<br />
-4000<br />
-5000<br />
Fig. 7. Root locus of the input vector control.<br />
Fig. 8. Configuration diagram of input vector control.<br />
4 IEEJ Trans. ●●, Vol.●●, No.●, ●●●