電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学
電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学
電気学会論文誌D Vol.130 No.11,pp.1205-1211 ... - 長岡技術科学大学

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
消 さないでください<br />
論 文 誌 テンプレート<br />
Ver.2009.04.06<br />
論 文<br />
発 電 機 を 電 源 として 接 続 したマトリックスコンバータの<br />
入 力 電 流 ベクトル 制 御 の 特 性 検 証<br />
学 生 員 春 名 順 之 介<br />
*<br />
正 員 伊 東 淳 一<br />
*<br />
Evaluation of Input Current Vector Control of a Matrix Converter with Generator as Input<br />
Junnosuke Haruna * , Student Member, Jun-ichi Itoh * , Member<br />
In this paper, we discuss the characteristics of input current vector control of a matrix converter with a generator as the input.<br />
The line impedance is higher than the impedance of the power grid, and the resonance between the synchronous reactance of the<br />
generator and the input capacitance results in instability behavior operation of the matrix converter. Input current stability control<br />
was proposed by the authors as a solution to this problem. However, the efficiency of the generator decreased when conventional<br />
control was employed at a light load. By using the proposed method, we can achieve a stable input current by employing<br />
proportional–integral–derivative (PID) control and optimize the input power factor according to the pole position of the<br />
generator. The validity of the proposed control strategy was confirmed by performing experiments. The proposed control<br />
achieves stable operations at an RL load, and a THD of 2.8% is obtained for the input current.<br />
キーワード:マトリックスコンバータ, 発 電 機 電 源 , 同 期 リアクタンス, 入 力 電 流 ベクトル 制 御 , 入 力 電 流 安 定 化 制 御<br />
Keywords:Matrix converter, Generator power supply, Synchronous reactance, Input current vector control, Input current stability control<br />
1. はじめに<br />
近 年 ,PWM 整 流 器 とインバータからなる Back-to-Back<br />
(BTB)システムの 小 形 化 , 高 効 率 化 の 課 題 解 決 の 一 つの 方 法<br />
としてマトリックスコンバータが 注 目 され, 盛 んに 研 究 さ<br />
れている (1)-(14) 。マトリックスコンバータは 直 流 リンクを 介<br />
さずに 商 用 電 源 から 任 意 の 交 流 へ 直 接 変 換 するため, 従 来<br />
の BTB システムにおける 直 流 リンク 部 と,エネルギーバッ<br />
ファである 大 容 量 の 電 解 コンデンサを 必 要 としない。 加 え<br />
て,BTB システムと 同 様 の 機 能 である 出 力 の VVVF 動 作 と<br />
電 力 回 生 , 電 源 の 高 調 波 対 策 を 1 台 の 電 力 変 換 器 で 実 現 で<br />
きる。 以 上 の 特 徴 から, 従 来 の BTB システムと 比 較 して 小<br />
形 化 , 軽 量 化 , 長 寿 命 化 , 高 効 率 化 が 期 待 できる。また,<br />
双 方 向 スイッチを 実 現 するために 逆 耐 圧 を 持 つ IGBT が 開<br />
発 され, 様 々な 用 途 へのマトリックスコンバータの 適 用 が<br />
考 えられている。<br />
マトリックスコンバータは, 主 にエレベータやポンプ,<br />
空 調 設 備 等 への 応 用 が 主 に 検 討 されているが,その 他 にも<br />
多 数 の 応 用 が 考 えられている。 一 例 として 風 力 発 電 やハイ<br />
ブリッド EV への 適 用 が 考 えられ,こうした 用 途 では,マト<br />
*<br />
長 岡 技 術 科 学 大 学<br />
〒940-2188 新 潟 県 長 岡 市 上 富 岡 町 1603-1<br />
Nagaoka University of Technology<br />
1603-1 Kamitomioka-cho Nagaoka, Niigata 940-2188<br />
リックスコンバータの 入 力 側 には 発 電 機 が 接 続 される。な<br />
お,マトリックスコンバータは 一 端 にフィルタコンデンサ<br />
が 必 要 であるが, 一 般 にはフィルタコンデンサ 側 に 系 統 が<br />
接 続 されることから, 本 論 文 では,フィルタコンデンサを<br />
接 続 する 側 を 入 力 側 と 定 義 する。<br />
発 電 機 は 商 用 電 源 と 比 較 すると 出 力 インピーダンスが 大<br />
きく,マトリックスコンバータと 同 期 発 電 機 を 接 続 する 場<br />
合 , 発 電 機 の 同 期 リアクタンスが 数 十 %となり, 入 力 フィル<br />
タコンデンサとの 間 で 共 振 が 発 生 し,システムが 不 安 定 に<br />
なる。 特 に 出 力 電 力 を 一 定 に 制 御 する 場 合 , 等 価 的 に 負 性<br />
抵 抗 が 現 れ 不 安 定 を 助 長 し, 安 定 性 を 悪 化 させる。 系 統 の<br />
インピーダンスや 入 力 フィルタの 安 定 性 についてはこれま<br />
で 議 論 されているが (8)(12) , 発 電 機 のような 大 きいインピーダ<br />
ンスをもつ 電 源 を 接 続 した 場 合 の 特 性 については,これま<br />
であまり 検 討 されていない。<br />
以 上 の 問 題 に 対 して 筆 者 らはこれまでに,マトリックス<br />
コンバータと 発 電 機 を 組 み 合 わせたシステムにおける, 発<br />
電 機 の 同 期 リアクタンスの 影 響 を 考 慮 した 入 力 電 流 安 定 化<br />
制 御 ( 以 下 , 従 来 法 )を 提 案 している (1) 。この 方 式 は, 発 電 機<br />
の 端 子 電 圧 を 回 転 座 標 変 換 し,ダンピング 制 御 (8)(15) を 行 うこ<br />
とで, 入 力 フィルタの 共 振 抑 制 と 発 電 機 の 加 減 速 運 転 を 実<br />
現 する。 発 電 機 を 電 源 とするマトリックスコンバータに 従<br />
来 法 を 適 用 し, 誘 導 電 動 機 を V/f 制 御 で 駆 動 することでその<br />
© 200● The Institute of Electrical Engineers of Japan. 1
有 用 性 を 確 認 している。 一 方 , 従 来 法 は, 発 電 機 の 端 子 電<br />
圧 から 発 電 機 電 流 指 令 を 演 算 するオープンループ 制 御 で 構<br />
成 されている。オープンループ 制 御 は 制 御 が 簡 単 であるが,<br />
フィルタコンデンサの 電 流 が 無 視 できない 軽 負 荷 や, 同 期<br />
リアクタンスによる 電 圧 降 下 が 顕 著 となる 重 負 荷 時 では,<br />
発 電 機 の 逆 起 電 力 に 対 して 力 率 1 で 運 転 することが 難 しい。<br />
本 論 文 では, 軽 負 荷 時 における 従 来 法 の 発 電 機 電 流 とフ<br />
ィルタコンデンサの 電 流 について 考 察 し, 従 来 法 における<br />
発 電 機 内 部 力 率 の 悪 化 について 議 論 する。 次 に, 従 来 法 の<br />
解 決 手 段 として,マトリックスコンバータの 発 電 機 電 流 を<br />
フィードバックし, 発 電 機 側 の 制 御 にベクトル 制 御 を 応 用<br />
した 入 力 電 流 ベクトル 制 御 (16) ( 以 下 , 提 案 法 )を 提 案 する。 提<br />
案 法 では,フィードバックした 発 電 機 電 流 を 発 電 機 の 逆 起<br />
電 力 位 相 情 報 を 元 に PID 制 御 を 適 用 することで, 入 力 フィ<br />
ルタの 共 振 を 抑 制 し,さらに, 負 荷 の 大 きさにかかわらず<br />
発 電 機 電 流 位 相 を 発 電 機 の 逆 起 電 力 と 同 相 に 制 御 する。<br />
本 稿 では,マトリックスコンバータの 入 力 に 同 期 発 電 機<br />
を 接 続 して 提 案 法 を 適 用 し,その 有 用 性 について 検 討 して<br />
いる。 提 案 法 を 用 いることによって, 発 電 機 電 源 時 の 動 作<br />
の 安 定 化 を 確 認 するとともに, 軽 負 荷 時 , 重 負 荷 時 それぞ<br />
れの 入 力 力 率 と 発 電 機 電 流 振 幅 の 関 係 について 検 証 し, 発<br />
電 機 の 銅 損 が 低 減 できることを 示 す。<br />
2. 軽 負 荷 時 の 入 力 力 率<br />
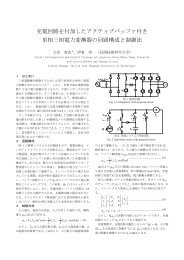
図 1 にマトリックスコンバータと 発 電 機 を 接 続 したシス<br />
テム 図 を 示 す。マトリックスコンバータの 双 方 向 スイッチ<br />
は 逆 阻 止 IGBT を 逆 並 列 に 接 続 した 構 成 を 用 いる。 本 システ<br />
ムは 発 電 機 の 同 期 リアクタンスをフィルタリアクトルとす<br />
ることで, 入 力 フィルタをフィルタコンデンサのみで 構 成<br />
できる。 一 般 的 に,マトリックスコンバータの 入 力 フィル<br />
タには 共 振 を 抑 制 するためのダンピング 抵 抗 を 挿 入 する。<br />
ダンピング 抵 抗 の 挿 入 方 式 は,フィルタリアクトルに 並 列<br />
接 続 する 方 式 と,フィルタコンデンサに 直 列 接 続 する 方 式<br />
がある。フィルタコンデンサに 直 列 接 続 する 場 合 ,コンデ<br />
ンサの 両 端 電 圧 は 振 動 が 大 きく,また,フィルタコンデン<br />
サに 流 入 する 電 流 は 多 くの 高 調 波 成 分 を 含 むため, 損 失 が<br />
大 きくなる。 従 って, 損 失 低 減 の 観 点 から,ダンピング 抵<br />
抗 はフィルタリアクトルに 並 列 接 続 するのが 望 ましい。し<br />
かし, 本 システムではフィルタリアクトルに 発 電 機 の 同 期<br />
リアクタンスを 利 用 するため,ダンピング 抵 抗 を 並 列 接 続<br />
することができない。<br />
図 2(a)に 図 1 の 入 力 一 相 分 を 抜 き 出 したマトリックスコ<br />
ンバータの 一 相 分 フィルタ 回 路 を,(b)に 一 相 分 フィルタ 回<br />
路 をラプラス 演 算 子 を 導 入 して 表 したブロック 図 を 示 す。<br />
図 2 において, 発 電 機 の 同 期 リアクタンスを L x ,フィルタ<br />
.<br />
コンデンサを C f , 発 電 機 の 逆 起 電 力 ( 相 電 圧 )を Vg, 発 電 機<br />
.<br />
.<br />
の 端 子 電 圧 ( 相 電 圧 )を Vc, 発 電 機 電 流 ( 線 電 流 )を Iin,フィル<br />
.<br />
タコンデンサに 流 入 する 電 流 を Ic,マトリックスコンバータ<br />
.<br />
の 入 力 電 流 (PWM 波 形 の 電 流 )を Imc と 定 義 する。また, 入 力<br />
Fig. 1. System configuration diagram of the matrix converter<br />
with the generator as input.<br />
V &<br />
g<br />
L x<br />
V & c<br />
I &<br />
in<br />
I & c<br />
I &<br />
mc<br />
C f<br />
(a) Single phase equivalent circuit.<br />
(b) Block diagram of input filter.<br />
Fig. 2. Configuration of input filter.<br />
Fig. 3. Conventional input current stability control.<br />
力 率 を 端 子 電 圧 と 発 電 機 電 流 の 位 相 差 より 定 義 し, 発 電 機<br />
の 逆 起 電 力 と 発 電 機 電 流 の 位 相 差 より, 発 電 機 内 部 力 率 と<br />
定 義 する。<br />
図 2(b)より,マトリックスコンバータの 入 力 電 流 I mc (s)か<br />
ら 発 電 機 電 流 I in (s)までの 伝 達 関 数 は(1) 式 となる。<br />
I<br />
I<br />
in<br />
mc<br />
() s<br />
() s<br />
1<br />
= LxC<br />
f<br />
1<br />
......................................................(1)<br />
s<br />
2 +<br />
L C<br />
x<br />
f<br />
(1) 式 には 減 衰 項 が 存 在 しないため, 本 システムでは 入 力<br />
フィルタの 共 振 が 持 続 し, 動 作 が 不 安 定 となる。<br />
図 3 に 従 来 の 入 力 電 流 安 定 化 制 御 のブロック 図 を 示 す。<br />
ただし,v cr ,v cs ,v ct は 発 電 機 各 相 の 端 子 電 圧 ,θ vc は 発 電 機<br />
の 端 子 電 圧 位 相 角 ,K d は 従 来 法 のダンピングゲイン,i * r ,i * s ,<br />
i * t はマトリックスコンバータの 各 相 の 入 力 電 流 指 令 ,θ pfc は<br />
入 力 力 率 調 整 角 である。また, 図 2(b)の 各 変 数 は 2 軸 成 分 を<br />
持 ったベクトル 量 であるが, 図 3 の 各 変 数 はスカラー 量 で<br />
2 IEEJ Trans. ●●, Vol.●●, No.●, ●●●
表 題 を 簡 略 化 した 題<br />
ある。 従 来 法 では, 発 電 機 の 三 相 端 子 電 圧 を 検 出 して 回 転<br />
座 標 変 換 し,ローパスフィルタ(LPF)を 用 いて 入 力 フィルタ<br />
の 共 振 成 分 を 抽 出 した 後 ,ダンピングゲイン K d を 乗 じて 元<br />
の 信 号 に 重 畳 し, 再 び 回 転 座 標 変 換 をして 三 相 交 流 量 に 復<br />
元 し,マトリックスコンバータの 三 相 入 力 電 流 指 令 を 得 る。<br />
従 来 法 はオープンループ 制 御 であるため,マトリックスコ<br />
ンバータの 入 力 電 流 の 制 御 は 電 圧 変 動 による 外 乱 やフィル<br />
タ 電 流 など 影 響 を 考 慮 することが 難 しい。 以 下 にフィルタ<br />
コンデンサ 電 流 の 軽 負 荷 時 の 影 響 について 考 察 する。<br />
.<br />
図 2(a)より, 発 電 機 電 流 Iin,マトリックスコンバータの<br />
.<br />
.<br />
入 力 電 流 Imc,フィルタコンデンサ 電 流 Ic, 発 電 機 の 逆 起 電<br />
. .<br />
力 Vg, 端 子 電 圧 Vc の 関 係 は(2) 式 となる。<br />
⎧I&<br />
in<br />
= I&<br />
mc<br />
+ I&<br />
c<br />
⎪<br />
⎨V<br />
&<br />
g<br />
−V&<br />
c<br />
= jω LxI&<br />
in ........................................................(2)<br />
⎪<br />
⎪⎩<br />
I&<br />
c<br />
= jωC<br />
fV<br />
&<br />
c<br />
図 4 に(2) 式 より 求 めた 重 負 荷 時 と 軽 負 荷 時 の 発 電 機 電 流 ,<br />
マトリックスコンバータの 入 力 電 流 ,フィルタコンデンサ<br />
電 流 の 関 係 をフェーザ 図 で 示 す。マトリックスコンバータ<br />
は 入 力 力 率 調 整 角 θ pfc により,マトリックスコンバータの 入<br />
力 電 流 が 基 本 的 に 逆 起 電 力 と 同 位 相 となるように 制 御 され<br />
る。 重 負 荷 時 は 発 電 機 電 流 の 振 幅 がフィルタコンデンサ 電<br />
流 に 比 べ 大 きいため,フィルタコンデンサ 電 流 の 影 響 は 小<br />
さい。その 結 果 ,マトリックスコンバータの 入 力 電 流 と 発<br />
電 機 電 流 の 位 相 差 は 小 さく, 発 電 機 内 部 力 率 をほぼ 1 に 制<br />
御 できる。しかし, 軽 負 荷 時 では 発 電 機 電 流 の 振 幅 が 小 さ<br />
くなるため, 相 対 的 にフィルタコンデンサ 電 流 の 影 響 が 大<br />
きくなり,マトリックスコンバータの 入 力 電 流 と 発 電 機 電<br />
流 の 位 相 差 が 大 きくなる。すると, 発 電 機 の 逆 起 電 力 と 同<br />
相 に 制 御 しても, 発 電 機 内 部 力 率 が 悪 化 する。その 結 果 ,<br />
発 電 機 電 流 が 増 加 し, 発 電 機 の 銅 損 が 増 加 する。<br />
.<br />
一 方 , 出 力 電 圧 V out は 発 電 機 の 逆 起 電 力 Vg, 変 調 率 λ(0≦<br />
λ≦0.866), 発 電 機 内 部 力 率 cosθより(3) 式 となる。<br />
V<br />
λ & ............................................................(3)<br />
= cosθ<br />
out<br />
V g<br />
従 って, 発 電 機 内 部 力 率 が 悪 化 すると, 発 電 機 の 銅 損 の<br />
増 大 に 加 えて, 電 圧 利 用 率 が 低 下 する。たとえば, 電 気 自<br />
動 車 のような 軽 負 荷 での 効 率 が 重 要 な 用 途 を 考 えると, 軽<br />
負 荷 時 の 発 電 機 内 部 力 率 の 改 善 が 求 められる。<br />
3. 入 力 電 流 ベクトル 制 御<br />
前 章 において, 発 電 機 をマトリックスコンバータに 接 続<br />
すると 入 力 側 で 振 動 が 発 生 する 課 題 に 対 し, 従 来 法 では 発<br />
電 機 の 端 子 電 圧 と 同 相 の 振 動 を 三 相 入 力 電 流 指 令 に 重 畳 す<br />
ることで 振 動 を 抑 制 できること,また, 発 電 機 内 部 力 率 を 1<br />
に 制 御 することで 発 電 機 の 銅 損 を 低 減 し,かつ, 電 圧 利 用<br />
率 を 最 大 にできることを 示 した。 一 方 で, 軽 負 荷 時 にはマ<br />
トリックスコンバータの 入 力 電 流 の 位 相 と 発 電 機 の 逆 起 電<br />
力 の 位 相 を 一 致 させても, 発 電 機 内 部 力 率 が 悪 化 する 問 題<br />
I &<br />
in<br />
I &<br />
c<br />
V & g<br />
q<br />
I &<br />
mc<br />
j ω L I &<br />
x in<br />
V &<br />
c<br />
d<br />
I &<br />
c<br />
V & g<br />
I &<br />
in<br />
q<br />
j ω L I &<br />
x in<br />
I &<br />
mc<br />
Fig. 4. Relationship among the input current, the input PWM<br />
current and the input filter current of the matrix converter.<br />
V &<br />
c<br />
Fig. 5. Block diagram of input current vector control.<br />
I &<br />
c<br />
V & g<br />
I &<br />
in<br />
q<br />
j ωL x<br />
I&<br />
in<br />
V &<br />
c<br />
I &<br />
mc<br />
Fig. 6. Relationship among input current, input PWM current<br />
and input filter current of input filter with proposed input<br />
current vector control.<br />
を 指 摘 した。 本 章 では, 発 電 機 電 流 をフィードバックし,<br />
PID 制 御 を 電 流 制 御 に 適 用 することで, 従 来 法 の 振 動 を 抑 制<br />
する 効 果 と 軽 負 荷 時 の 発 電 機 内 部 力 率 の 制 御 に 関 する 課 題<br />
の 両 方 を 解 決 できる 入 力 電 流 ベクトル 制 御 について 説 明 す<br />
る。<br />
図 5 に 入 力 電 流 ベクトル 制 御 のブロック 図 を 示 す。ただ<br />
し, 図 5 の 各 変 数 は 2 軸 成 分 を 持 ったベクトル 量 である。<br />
提 案 法 では, 発 電 機 電 流 指 令 I * in (s)と 発 電 機 電 流 I in (s)の 偏 差<br />
を 計 算 し, 電 流 フィードバックによって 発 電 機 電 流 の 安 定<br />
化 を 行 う。 提 案 法 の 特 徴 は, 発 電 機 電 流 指 令 を 発 電 機 内 部<br />
力 率 が 1 となるように 与 え,かつ 発 電 機 電 流 をフィードバ<br />
ックすることで,フィルタコンデンサ 電 流 の 影 響 を 考 慮 し<br />
た 制 御 が 可 能 な 点 にある。<br />
図 6 に 発 電 機 内 部 力 率 を 1 に 制 御 した 場 合 の 入 力 フィル<br />
.<br />
タのベクトル 図 を 示 す。 提 案 法 では 発 電 機 電 流 Iin を 直 接 制<br />
.<br />
御 可 能 なため,マトリックスコンバータの 入 力 電 流 Imc はフ<br />
.<br />
ィルタコンデンサ 電 流 Ic を 考 慮 した 方 向 に 制 御 される。 従<br />
って, 発 電 機 電 流 振 幅 によらず, 常 に 発 電 機 内 部 力 率 を 1<br />
に 制 御 できる。この 結 果 , 発 電 機 電 流 を 最 小 にできるので,<br />
発 電 機 効 率 が 最 大 となる。なお, 円 筒 形 永 久 磁 石 同 期 発 電<br />
d<br />
d<br />
電 学 論 ●,●● 巻 ● 号 ,●●● 年 3
機 の 場 合 , 発 電 機 内 部 力 率 を 1 とすることで, 最 大 効 率 と<br />
なるが, 一 方 , 非 突 極 形 永 久 磁 石 同 期 電 動 機 の 場 合 , 最 大<br />
効 率 を 得 るには,リラクタンストルクを 考 慮 して 電 流 指 令<br />
を 決 定 する。 電 流 制 御 器 はフィルタコンデンサと 同 期 リア<br />
クタンスの 共 振 による 発 電 機 電 流 の 振 動 を 抑 制 しなければ<br />
ならない。そこで, 以 下 に PID 制 御 における 発 電 機 電 流 の<br />
安 定 化 について 考 察 する。<br />
図 5 より, 発 電 機 電 流 指 令 I * in (s)から 発 電 機 電 流 I in (s)まで<br />
の 伝 達 関 数 を 求 めると,(4) 式 が 得 られる。<br />
K K<br />
d 2 p Ki<br />
s + s +<br />
I L<br />
in<br />
xC<br />
f<br />
LxC<br />
f<br />
LxC<br />
f<br />
=<br />
.........................(4)<br />
*<br />
I<br />
K<br />
in<br />
K 1+<br />
3 d 2<br />
p Ki<br />
s + s + s +<br />
L C L C L C<br />
x<br />
f<br />
x<br />
f<br />
ただし,K i は 積 分 ゲインで,K i =K p /T i ,K d は 微 分 ゲインで<br />
K d =K p T d である。<br />
K i =0,K d =0(P 制 御 )のとき,(4) 式 は, 分 母 に 一 次 の s 項 が<br />
現 れないため, 制 動 係 数 がゼロであることが 明 らかである。<br />
また,これに 積 分 器 を 加 え(K i ≠0)PI 制 御 とした 場 合 も, 二<br />
次 の s 項 が 現 れないため,ラウス・フルビッツの 安 定 条 件 を<br />
満 たせず,PI 制 御 でも 安 定 化 できない。しかし,K i =0 でも<br />
K d を 追 加 することによって(PD 制 御 ), 一 次 の s 項 が 現 れ,<br />
制 動 係 数 を 設 定 できる。よって, 回 転 座 標 上 で 構 成 される<br />
発 電 機 電 流 制 御 系 において,K d は 安 定 性 を 確 保 し,K i は 定<br />
常 偏 差 をなくす 働 きがあることがわかる。<br />
(4) 式 より 提 案 法 の 状 態 方 程 式 を 導 出 し,(5),(6) 式 を 得 る。<br />
ただし,x 1 ,x 2 ,x 3 ,は(4) 式 より 状 態 方 程 式 を 導 出 する 際 に<br />
生 じる, 各 積 分 項 に 対 応 した 状 態 変 数 である。<br />
⎡<br />
⎡x1<br />
⎤ ⎢ 0<br />
⎢ ⎥ ⎢<br />
p<br />
⎢<br />
x2<br />
⎥<br />
= ⎢ 0<br />
⎢x<br />
⎥ ⎢ Ki<br />
⎣ 3 ⎦ ⎢<br />
⎣<br />
LxC<br />
f<br />
1<br />
0<br />
1+<br />
K<br />
L C<br />
x<br />
f<br />
p<br />
0<br />
1<br />
K<br />
d<br />
L C<br />
x<br />
f<br />
x<br />
f<br />
⎤<br />
⎥⎡x1<br />
⎤ ⎡0⎤<br />
⎥⎢<br />
⎥ ⎢ ⎥ *<br />
⎥⎢<br />
x2<br />
⎥<br />
+<br />
⎢<br />
0<br />
⎥<br />
iin<br />
.............(5)<br />
⎥⎢<br />
⎣x<br />
⎥ ⎢<br />
3 ⎦ ⎣1⎥<br />
⎥ ⎦<br />
⎦<br />
⎡x1<br />
⎤<br />
⎡ K K<br />
⎤<br />
i<br />
p K<br />
d ⎢ ⎥<br />
iin = ⎢−<br />
− − ⎥⎢<br />
x2<br />
⎥ .......................(6)<br />
⎢⎣<br />
LxC<br />
f<br />
LxC<br />
f<br />
LxC<br />
f ⎥⎦<br />
⎢<br />
⎣x<br />
⎥<br />
3 ⎦<br />
(5) 式 を 用 いて,PI 制 御 ,PID 制 御 での 根 軌 跡 を 比 較 し,<br />
※ なお, 磁 極 位 置 センサが 何 らかの 理 由 で 使 用 できない 場 合 は,<br />
位 相 情 報 は 発 電 機 の 発 電 機 電 流 と 発 電 機 の 端 子 電 圧 , 発 電 機<br />
の 同 期 リアクタンス L x , 及 び, 発 電 機 の 運 転 周 波 数 より 推 定<br />
が 可 能 である。<br />
微 分 要 素 の 働 きを 定 量 的 に 評 価 する。<br />
図 7 に(5) 式 における, 比 例 ゲイン K p =0.1, 積 分 時 間<br />
T i =1ms, 微 分 時 間 T d =1ms としたときの PI 制 御 ,および PID<br />
制 御 の 根 配 置 を 示 す。PI 制 御 では 根 配 置 の 実 部 が 正 となり,<br />
かつ, 虚 数 部 の 値 が 大 きいため, 振 動 的 で 不 安 定 となる。<br />
これは,PI 制 御 においては, 制 動 係 数 の 項 が 存 在 しないた<br />
めである。 対 して,PID 制 御 の 場 合 ,すべての 根 の 実 部 が 負<br />
となり 安 定 となる。これは, 微 分 要 素 を 追 加 することで 制<br />
動 係 数 の 項 が 出 現 し, 制 動 係 数 を 設 定 できることを 表 す。<br />
以 上 より,PID 制 御 によって 入 力 フィルタの 共 振 現 象 を 抑 制<br />
できることがわかった。また, 図 7 より, 応 答 と 安 定 性 が<br />
所 望 の 値 になるように 各 根 を 配 置 することで 比 例 ゲイン,<br />
積 分 時 間 , 微 分 時 間 を 設 計 できる。 本 稿 では, 図 7 の 虚 軸<br />
の 最 近 傍 の 根 に 対 して 安 定 性 を 検 討 する。 最 近 傍 の 根 配 置<br />
と 二 次 標 準 形 の 式 を 比 較 することで 減 衰 係 数 を 近 似 的 に 計<br />
算 できる。 二 次 系 では, 根 が 原 点 から±45deg に 位 置 すると<br />
き, 減 衰 係 数 が 0.7 となる。そこで, 本 稿 では 根 軌 跡 から,<br />
減 衰 係 数 が 0.7 となるように 微 分 時 間 を 調 整 し,1ms と 設 定<br />
した。<br />
図 8 に 入 力 電 流 ベクトル 制 御 の 構 成 図 を 示 す。ただし,<br />
図 5 の 各 変 数 がベクトル 量 であるのに 対 して, 図 8 では 各<br />
変 数 をスカラー 量 で 表 記 していることに 注 意 すること。 提<br />
案 法 では, 発 電 機 電 流 位 相 を 発 電 機 の 逆 起 電 力 と 同 相 に 制<br />
御 する 必 要 があるため, 磁 極 位 置 センサにより 検 出 する ※ 。<br />
磁 極 位 置 センサの 出 力 は 周 波 数 に 応 じた 矩 形 波 であるた<br />
め,これに PLL を 用 いて, 入 力 周 波 数 f in ,および, 逆 起 電<br />
力 の 位 相 θ in を 検 出 する。 逆 起 電 力 の 位 相 θ in を 求 める 積 分 器<br />
は, 磁 極 位 置 センサの u 相 パルスの 立 ち 上 がりでリセット<br />
する。 発 電 機 電 流 指 令 値 は dq 軸 をそれぞれ i d =0,i q =1 とし,<br />
5000<br />
PI PID<br />
4000<br />
3000<br />
2000<br />
1000<br />
-16000 -14000 -1000 -500 0<br />
-1000<br />
-2000<br />
-3000<br />
-4000<br />
-5000<br />
Fig. 7. Root locus of the input vector control.<br />
Fig. 8. Configuration diagram of input vector control.<br />
4 IEEJ Trans. ●●, Vol.●●, No.●, ●●●
表 題 を 簡 略 化 した 題<br />
θ in を 用 いて 発 電 機 電 流 を 回 転 座 標 変 換 することで, 発 電 機<br />
電 流 位 相 と 逆 起 電 力 位 相 を 常 に 同 相 に 制 御 可 能 になり, 電<br />
圧 利 用 率 を 最 適 化 できる。<br />
マトリックスコンバータの 発 電 機 電 流 の 振 幅 は 有 効 電 力<br />
で 決 まるため, 絶 対 的 な 振 幅 は 制 御 できない。そこで, 有<br />
効 電 力 を 用 いて 発 電 機 電 流 の 規 格 化 を 行 い, 検 出 電 流 を 規<br />
格 化 する。 発 電 機 電 流 の 振 幅 は, 変 換 器 の 損 失 を 無 視 すれ<br />
ば 入 力 電 力 と 出 力 電 力 の 関 係 から 導 出 できる (5) 。このとき,<br />
出 力 電 力 p out と 入 力 電 力 p in は,それぞれ(7),(8) 式 のように<br />
表 すことができる。ただし,v * u ,v * v ,v * w は 三 相 出 力 電 圧 指<br />
令 ,i u ,i v ,i w は 三 相 出 力 電 流 ,v gr ,v gs ,v gt は 発 電 機 の 三 相<br />
Table 1. Parameters of the synchronous generator.<br />
Table 2. Experimental conditions.<br />
逆 起 電 力 ,i r * ,i s * ,i t * は 規 格 化 した 三 相 発 電 機 電 流 指 令 ,I amp<br />
は 発 電 機 電 流 振 幅 である。なお, 発 電 機 の 三 相 逆 起 電 力 v gr ,<br />
v gs ,v gt は PLL より 求 めた 発 電 機 の 周 波 数 に 逆 起 電 力 係 数 を<br />
乗 算 して 計 算 できる。また,I amp がゼロの 場 合 , 演 算 が 発 散<br />
するため,リミットを 設 けて 回 避 する。<br />
p<br />
out<br />
in<br />
= v i + v i + v i ..................................................(7)<br />
*<br />
u u<br />
amp<br />
*<br />
v v<br />
*<br />
w w<br />
* * *<br />
( v i + v i v i )<br />
p = I<br />
+ .........................................(8)<br />
gr r<br />
gs s<br />
gt t<br />
これらより, 入 力 電 流 の 振 幅 は(9) 式 のように 表 すことが<br />
できる。<br />
I<br />
amp<br />
v i + v i + v i<br />
= ..............................................(9)<br />
v + v +<br />
*<br />
u u<br />
*<br />
grir<br />
*<br />
v v<br />
*<br />
gsis<br />
*<br />
w w<br />
*<br />
vgtit<br />
(9) 式 において, 発 電 機 の 端 子 電 圧 にはスイッチング 周 波<br />
数 成 分 のリプルが 含 まれるため, 入 力 電 圧 には 発 電 機 の 端<br />
子 電 圧 を 使 用 せず, 発 電 機 の 逆 起 電 力 を 使 用 する。また,<br />
発 電 機 の 逆 起 電 力 は 直 接 検 出 することができないが, 逆 起<br />
電 力 は 発 電 機 の 運 転 周 波 数 に 比 例 するため, 逆 起 電 力 位 相<br />
より 速 度 を 求 め 推 定 する。なお, 本 システムにおいて 入 力<br />
フィルタの 共 振 周 波 数 を 高 く 設 定 する 場 合 , 同 期 リアクタ<br />
ンスが 大 きいためにフィルタコンデンサの 容 量 が 小 さくな<br />
り, 発 電 機 の 端 子 電 圧 は 振 幅 が 大 きくなる。その 結 果 ,ス<br />
イッチング 素 子 を 破 壊 する 恐 れが 発 生 する。そこで, 本 シ<br />
ステムでは 発 電 機 のコンデンサ 容 量 を 大 きく 設 定 し, 端 子<br />
電 圧 の 振 動 を 小 さく 抑 え,かつ, 共 振 周 波 数 を 低 くする。<br />
以 上 により, 制 御 周 期 を 共 振 周 波 数 に 対 して 十 分 高 く 設 定<br />
でき, 十 分 な 応 答 が 得 られるようになる。<br />
4. 実 験 結 果<br />
本 章 では, 表 1 の 同 期 発 電 機 を 電 源 とするマトリックス<br />
コンバータの 実 験 機 を 製 作 し, 表 2 の 実 験 条 件 にて 実 験 を<br />
行 った。 発 電 機 は 定 格 回 転 数 , 出 力 電 圧 制 御 は V/f 比 一 定 の<br />
オープンループである。また, 出 力 電 圧 振 幅 は 発 電 機 の 逆<br />
起 電 力 に 変 調 率 を 乗 算 して 決 定 し,V/f 比 で 除 算 して 周 波 数<br />
を 決 定 している。 以 上 により, 提 案 法 の 有 効 性 を 確 認 した。<br />
なお, 本 論 文 では 内 部 磁 石 形 (IPM) 発 電 機 を 用 いているが,<br />
逆 起 電 力 に 含 まれる 高 調 波 ひずみは 無 視 している。IPM 発<br />
電 機 の 突 極 比 や 高 調 波 ひずみの 扱 いについては 今 後 の 課 題<br />
(a) Without stability control.<br />
(b) Proposed input current vector control.<br />
Fig. 9. Experimental results obtained using an RL load.<br />
とする。<br />
図 9(a)に 従 来 法 ( 図 3 に 示 す 従 来 の 入 力 電 流 安 定 化 制 御 ),<br />
および, 提 案 法 ( 図 8 の 入 力 電 流 ベクトル 制 御 )を 適 用 せず,<br />
安 定 化 手 法 を 行 わない 場 合 の,(b) 提 案 法 を 用 いた 場 合 の RL<br />
負 荷 実 験 結 果 を 示 す。 安 定 化 手 法 を 全 く 行 わない(a)では,<br />
入 力 フィルタの 共 振 によって 端 子 電 圧 , 発 電 機 電 流 に 大 き<br />
な 振 動 ,ひずみが 発 生 し,それによって 出 力 側 もひずんで<br />
いるのが 確 認 できる。 一 方 , 提 案 法 を 適 用 した(b)では, 発<br />
電 機 電 流 , 端 子 電 圧 に 大 きな 振 動 などが 発 生 せず, 正 弦 波<br />
に 制 御 されているのが 確 認 できる。また, 入 力 側 が 安 定 し<br />
ているため, 出 力 電 圧 , 電 流 も 正 弦 波 に 制 御 されている。<br />
このとき,(a)の 発 電 機 電 流 ひずみ 率 は 10.7%, 出 力 電 流 ひず<br />
電 学 論 ●,●● 巻 ● 号 ,●●● 年 5
み 率 は 4.20%であるのに 対 し, 提 案 法 を 用 いた(b)では, 発<br />
電 機 電 流 ひずみ 率 は 2.80%, 出 力 電 流 ひずみ 率 は 1.65%とな<br />
り, 発 電 機 電 流 ひずみ 率 を 約 1/4, 出 力 電 流 ひずみ 率 を 約 1/2<br />
に 低 減 できる。<br />
図 10 に 従 来 法 ,および, 提 案 法 を 適 用 しない 場 合 (×),<br />
従 来 法 を 用 いた 場 合 (□), 提 案 法 を 用 いた 場 合 (■)の 発 電 機<br />
電 流 ひずみ 率 の 変 化 を 示 す。 従 来 法 , 提 案 法 のいずれも 適<br />
用 しない 場 合 はダンピング 要 素 が 発 電 機 の 巻 き 線 抵 抗 のみ<br />
であり, 負 荷 が 大 きくなるにつれて 入 力 フィルタ 共 振 の 影<br />
響 が 大 きくなるため, 発 電 機 電 流 ひずみ 率 は 増 加 する。 一<br />
方 , 従 来 法 , 及 び, 提 案 法 を 用 いた 場 合 では, 発 電 機 電 流<br />
ひずみ 率 が 全 負 荷 領 域 において 改 善 できることが 確 認 でき<br />
る。しかし, 重 負 荷 時 においては 従 来 法 の 発 電 機 電 流 ひず<br />
み 率 が 増 加 している。これは, 発 電 機 電 流 の 振 幅 は 重 負 荷<br />
になるにつれて 大 きくなるので, 入 力 力 率 を 1 に 制 御 する<br />
場 合 では d 軸 電 流 が 増 加 し, 出 力 可 能 な 電 圧 の 振 幅 が 指 令<br />
値 より 小 さくなり 過 変 調 となるためである。さらに, 提 案<br />
法 では 重 負 荷 であっても 発 電 機 電 流 ひずみ 率 は 抑 えられて<br />
いる。これは, 提 案 法 が 発 電 機 内 部 力 率 を 1 に 制 御 するた<br />
め,d 軸 電 流 は 常 にゼロとなり, 電 圧 利 用 率 が 最 大 となるの<br />
で 波 形 ひずみが 生 じないためである。<br />
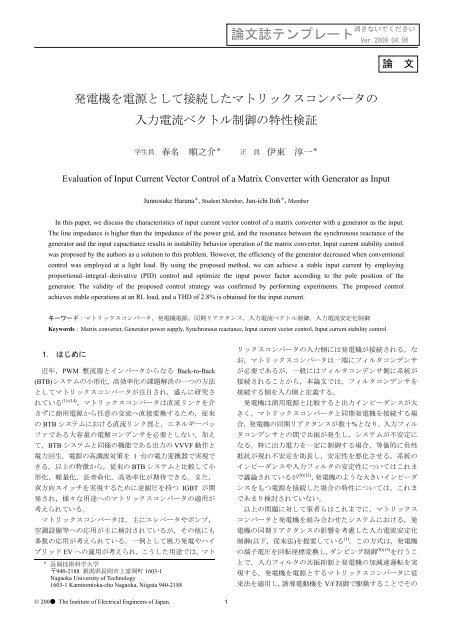
図 11 に 従 来 法 を 適 用 した 場 合 と 提 案 法 を 適 用 した 場 合 に<br />
おける, 負 荷 電 力 の 変 化 による 入 力 力 率 ( 総 合 力 率 )と 発 電 機<br />
電 流 振 幅 の 変 化 を 示 す。(a)は 軽 負 荷 時 の 入 力 力 率 , 発 電 機<br />
電 流 振 幅 の 特 性 を 表 し,(b)は 重 負 荷 時 の 特 性 を 示 す。<br />
まず 図 11(a)より, 軽 負 荷 時 の 動 作 について 考 察 すると,<br />
軽 負 荷 時 では 発 電 機 電 流 の 振 幅 が 小 さいので 端 子 電 圧 と 逆<br />
起 電 力 の 位 相 差 が 小 さくなり, 発 電 機 内 部 力 率 ( 発 電 機 の 逆<br />
起 電 力 と 発 電 機 電 流 による 力 率 )を 1 に 制 御 すると 入 力 力 率<br />
( 発 電 機 の 端 子 電 圧 と 発 電 機 電 流 による 力 率 )も 1 に 近 づくは<br />
ずである。しかし, 従 来 法 では 入 力 力 率 が 大 きく 悪 化 して<br />
いる。これは, 力 率 の 制 御 を 行 わない 場 合 , 軽 負 荷 時 にフ<br />
ィルタコンデンサ 電 流 の 影 響 を 大 きく 受 け, 入 力 力 率 が 制<br />
御 されないことを 示 している。 対 して, 提 案 法 では, 軽 負<br />
荷 時 でも 入 力 力 率 が 従 来 法 より 改 善 されている。 発 電 機 電<br />
流 振 幅 に 着 目 すると, 力 率 制 御 を 行 わない 場 合 では 同 じ 負<br />
荷 電 力 に 対 して 発 電 機 電 流 振 幅 が 大 きいが, 提 案 法 を 適 用<br />
することにより 発 電 機 電 流 振 幅 の 増 加 を 抑 えられる。この<br />
とき, 提 案 法 を 用 いることで 発 電 機 の 銅 損 は 最 大 で 1/3 に 低<br />
減 できる。なお,125W から 提 案 法 でも 入 力 力 率 が 急 に 低 下<br />
しているのは, 出 力 電 力 が 小 さくなり,フィルタ 電 流 の 無<br />
効 電 流 に 対 して 補 正 する 電 流 が 小 さいため, 補 償 しきれな<br />
くなるためである。<br />
次 に 図 11(b)より, 重 負 荷 時 の 特 性 について 検 討 する。 重<br />
負 荷 時 における 従 来 法 は, 入 力 力 率 が 1 に 制 御 され, 負 荷<br />
が 大 きくなるにつれて 発 電 機 電 流 振 幅 が 増 加 する。 一 方 ,<br />
提 案 法 は 負 荷 が 大 きくなるにつれて 発 電 機 電 流 振 幅 は 増 加<br />
するが, 入 力 力 率 は 低 下 する。また, 発 電 機 電 流 振 幅 を 従<br />
来 法 と 比 較 すると 小 さい。これは, 従 来 法 では 発 電 機 の 端<br />
子 電 圧 と 同 相 に 発 電 機 電 流 が 制 御 されるために, 重 負 荷 時<br />
Generator current THD (%)<br />
Input power factor<br />
Fig. 10. Generator current THD characteristic by conventional<br />
method and proposed method.<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
↓Proposed control<br />
↑Conventional control<br />
Conventional control↓<br />
↑Proposed control<br />
200 400 600 800 1000 1200<br />
Load power (W)<br />
↑Proposed control<br />
(a) Light load.<br />
Conventional control↓<br />
Conventional control↓<br />
0<br />
0<br />
1000 1500 2000 2500 3000 3500 4000<br />
Load power (W)<br />
↑Proposed control<br />
(b) Heavy load.<br />
Fig. 11. Relationship between load power and input power<br />
factor when the proposed method is used and when the<br />
conventional method is employed.<br />
には 無 効 電 流 が 増 加 するのに 対 し, 提 案 法 では 発 電 機 内 部<br />
力 率 が 1 に 制 御 されているため, 無 効 電 流 がゼロになるか<br />
らである。このとき, 発 電 機 電 流 振 幅 は 最 大 で 14% 低 減 で<br />
き, 発 電 機 の 銅 損 は 26% 減 少 する。<br />
以 上 の 結 果 より, 提 案 法 では 軽 負 荷 時 , 重 負 荷 時 のいず<br />
れにおいても 発 電 機 電 流 のひずみを 激 減 できることと, 発<br />
電 機 内 部 力 率 を 1 に 制 御 し,ひずみが 生 じることなく 最 大<br />
電 圧 を 出 力 できることを 確 認 できた。<br />
5. 結 論<br />
本 論 文 では, 発 電 機 をマトリックスコンバータに 接 続 し<br />
たシステムにおいて, 従 来 法 における 軽 負 荷 時 の 課 題 を 明<br />
らかにし,その 解 決 策 として, 発 電 機 電 流 をフィードバッ<br />
クする 入 力 電 流 ベクトル 制 御 を 提 案 した。 提 案 法 の 伝 達 関<br />
8<br />
6<br />
4<br />
2<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
18<br />
16<br />
14<br />
12<br />
10<br />
Generator current (A)<br />
6 IEEJ Trans. ●●, Vol.●●, No.●, ●●●
表 題 を 簡 略 化 した 題<br />
数 より 状 態 方 程 式 を 導 出 し, 電 流 制 御 の 微 分 要 素 について<br />
安 定 性 解 析 を 行 い,その 有 用 性 を 検 討 した。<br />
以 上 の 検 討 に 対 し, 発 電 機 を 接 続 したマトリックスコン<br />
バータによる 実 験 を 行 い, 以 下 の 項 目 について 確 認 した。<br />
(1) 提 案 法 を 適 用 することで, 発 電 機 電 流 ひずみを 1/4<br />
以 下 に 改 善 し, 安 定 に 制 御 できること<br />
(2) 従 来 法 と 比 較 して,フィルタコンデンサ 電 流 の 影 響<br />
を 考 慮 した 入 力 電 流 制 御 が 行 えるため, 軽 負 荷 時 の<br />
効 率 を 改 善 できること<br />
(3) 発 電 機 内 部 力 率 を 1 に 制 御 し, 重 負 荷 時 の 発 電 機 電<br />
流 ひずみ 率 の 増 加 を 抑 制 できること<br />
以 上 より, 提 案 法 が 従 来 法 より 有 効 であることを 確 認 し<br />
た。 今 後 の 課 題 として, 負 荷 を 電 動 機 としたときの 制 御 の<br />
高 性 能 化 が 挙 げられる。なお, 本 研 究 は 平 成 17 年 度 産 業 技<br />
術 研 究 助 成 事 業 の 支 援 を 受 けており, 関 係 各 位 に 感 謝 の 意<br />
を 表 します。<br />
( 平 成 ●● 年 ● 月 ● 日 受 付 , 平 成 ●● 年 ● 月 ● 日 再 受 付 )<br />
文<br />
(1) J. Haruna and J. Itoh: “Control Strategy of a Matrix Converter with a<br />
Generator as Input”, IEEJ Trans., Vol.129-D, No.5, pp.482-489 (2009)<br />
春 名 順 之 介 ・ 伊 東 淳 一 :「 発 電 機 を 電 源 とするマトリックスコンバー<br />
タの 制 御 法 」, 電 学 論 D,Vol.129,No.5,pp.482-489 (2009)<br />
(2) J. Itoh, H. Kodachi, A. Odaka, I. Sato, H. Ohguchi and H. Umida: “A High<br />
Performance Control Method for the Matrix Converter Based on PWM<br />
generation of Virtual AC/DC/AC Conversion”, JIASC IEEJ,<br />
pp.I-303-I-308 (2004)<br />
伊 東 淳 一 ・ 小 太 刀 博 和 ・ 小 高 章 弘 ・ 佐 藤 以 久 也 ・ 大 口 英 樹 ・ 海 田 英<br />
俊 :「パルスパターンに 着 目 した 仮 想 AC/DC/AC 変 換 方 式 によるマ<br />
トリックスコンバータの 高 性 能 化 」, 平 成 16 年 電 気 学 会 産 業 応 用 部<br />
門 大 会 ,pp.I-303-I-308 (2004)<br />
(3) A. Odaka, I. Sato, H. Ohguchi, Y. Tamai, H. Mine and J. Itoh: “A PAM<br />
Control Method for the Matrix Converter Based on Virtual AC/DC/AC<br />
Conversion Method”, IEEJ Trans., Vol.126-D, No.9, pp.1185-1192 (2006)<br />
小 高 章 弘 ・ 佐 藤 以 久 也 ・ 大 口 英 樹 ・ 玉 井 康 寛 ・ 美 根 宏 則 ・ 伊 東 淳 一 :<br />
「 仮 想 AC/DC/AC 変 換 方 式 に 基 づいたマトリックスコンバータの<br />
PAM 制 御 法 」, 電 学 論 D,Vol.126,No.9,pp.1185-1192 (2006)<br />
(4) J. Oyama, X. Xia, T. Higuchi, K. Kuroki, E. Yamada and T. Koga: “VVVF<br />
On-line Control of Matrix Converter”, IEEJ Trans., Vol.116-D, No.6,<br />
pp.644-651 (1996)<br />
小 山 純 ・ 夏 暁 戒 ・ 樋 口 剛 ・ 黒 木 恒 二 ・ 山 田 英 二 ・ 古 賀 高 志 :「PWM<br />
サイクロコンバータの VVVF オンライン 制 御 」, 電 学 論 D,Vol.116,<br />
No.6,pp.644-651 (1996)<br />
(5) T. Takeshita and H. Shimada: “Matrix Converter Control Using Direct<br />
AC/AC Conversion Approach to Reduce Output Voltage Harmonics”,<br />
IEEJ Trans., Vol.126-D, No.6, pp.778-787 (2006)<br />
竹 下 隆 晴 ・ 島 田 大 志 :「 出 力 電 圧 高 調 波 を 低 減 する AC/AC 直 接 変 換<br />
方 式 マトリックスコンバータ 制 御 」, 電 学 論 D,Vol.126,No.6,<br />
pp.778-787 (2006)<br />
(6) Y. Tadano, S. Hamada, S. Urushibata, M. Nomura, Y. Sato and M. Ishida:<br />
“A Space Vector Modulation Scheme for Matrix Converter that Gives Top<br />
Priority to the Improvement of the Output Control Performance”, IEEJ<br />
Trans., Vol.128-D, No.5, pp.631-641 (2008)<br />
只 野 裕 吾 ・ 濱 田 鎮 教 ・ 漆 畑 正 太 ・ 野 村 昌 克 ・ 佐 藤 之 彦 ・ 石 田 宗 秋 :「 出<br />
力 制 御 性 能 の 向 上 に 着 目 したマトリックスコンバータの 空 間 ベクト<br />
ル 変 調 法 」, 電 学 論 D,Vol.128,No.5,pp.631-641 (2008)<br />
(7) T. Nunokawa and T. Takeshita: “Resonance Suppression Control on<br />
Complex Plane for Three-Phase to Three-Phase Matrix Converters”,<br />
SPC-07-80, pp.33-38 (2007)<br />
布 川 智 康 ・ 竹 下 隆 晴 :「 複 素 座 標 変 換 を 用 いた 三 相 / 三 相 マトリック<br />
スコンバータの 共 振 抑 制 制 御 」, 半 導 体 電 力 変 換 研 究 会 ,pp.33-38<br />
献<br />
(2007)<br />
(8) I. Sato, J. Itoh, H. Ohguchi, A. Odaka and H. Mine: “An Improvement<br />
Method of Matrix Converter Drives Under Input Voltage Disturbances”,<br />
IPEC-Niigata, pp.546-551 (2005)<br />
(9) H. Nikkhajoei and M. Reza Iravani: “A Matrix Converter Based<br />
Mivro-Turbine Distributed Generation System”, IEEE Trans., Vol.20,<br />
No.3, pp.2182-2192 (2005)<br />
(10) E. Wiechmann, P. Burgos and J. Rodriguez: “Continuously<br />
Motor-Synchronized Ride-Through Capability for Matrix-Converter<br />
Adjustable-Speed Drives”, IEEE Trans., Vol.49, No.2, p.390 (2002)<br />
(11) J. Lettl: “Matrix Converter Induction Motor Drive”, EPE-PEMC,<br />
pp.787-792 (2006)<br />
(12) F. Blaabjerg, D. Casadei, Christian Klumpner and M. Matteini:<br />
“Comparison of Two Current Modulation Strategies for Matrix Converters<br />
Under Unbalanced Input Voltage Conditions”, IEEE Trans., Vol.49, No.2,<br />
pp.289-296 (2002)<br />
(13) P. W. Wheeler, J. Rodriguez, J. C. Clare and L. Empringham: “Matrix<br />
Converters: A Technology Review” IEEE Trans. on Industry Electronics<br />
Vol.49, No.2, pp.274-288, (2002)<br />
(14) P. W. Wheeler, J. C. Clare and P. Zanchetta: “A Three-Phase Utility Power<br />
Supply Based on the Matrix Converter”, IAS, pp.1447-1451 (2004)<br />
(15) J. Itoh, J. Toyosaki, and H. Ohsawa: “High performance V/f control<br />
method for PM Motor”, IEEJ Trans., Vol.122-D, No.3, pp.253-259 (2002)<br />
伊 東 淳 一 ・ 豊 崎 次 郎 ・ 大 沢 博 :「 永 久 磁 石 同 期 電 動 機 の V/f 制 御 の 高<br />
性 能 化 」, 電 学 論 D,Vol.122,No.2,pp.253-259 (2002)<br />
(16) 杉 本 英 彦 ・ 小 山 正 人 ・ 玉 井 伸 三 :「AC サーボシステムの 理 論 と 設 計<br />
の 実 際 - 基 礎 からソフトウェアサーボまで-」,(1990)<br />
春 名 順 之 介 ( 学 生 員 ) 1983 年 7 月 6 日 生 。2006 年 3 月<br />
長 岡 技 術 科 学 大 学 電 気 電 子 情 報 工 学 課 程 卒 業 。<br />
2008 年 3 月 同 大 学 大 学 院 工 学 研 究 科 修 士 課 程 電<br />
気 電 子 情 報 工 学 専 攻 修 了 。 同 年 4 月 博 士 後 期 課<br />
程 エネルギー・ 環 境 工 学 専 攻 に 進 学 。 主 に 電 力<br />
変 換 回 路 に 関 する 研 究 に 従 事 。<br />
伊 東 淳 一<br />
( 正 員 ) 1972 年 生 。1996 年 3 月 長 岡 技 術 科 学<br />
大 学 大 学 院 工 学 研 究 科 修 士 課 程 修 了 。 同 年 4 月 ,<br />
富 士 電 機 ( 株 ) 入 社 。2004 年 4 月 長 岡 技 術 科 学 大<br />
学 電 気 系 准 教 授 。 現 在 に 至 る。 主 に 電 力 変 換 回<br />
路 , 電 動 機 制 御 の 研 究 に 従 事 。 博 士 ( 工 学 )( 長 岡<br />
技 術 科 学 大 学 )。2007 年 第 63 回 電 気 学 術 振 興 賞<br />
進 歩 賞 受 賞 。IEEE 会 員 。<br />
電 学 論 ●,●● 巻 ● 号 ,●●● 年 7