制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学
制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学
制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
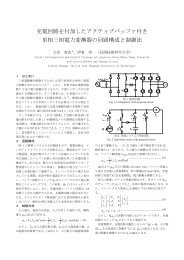
を 検 出 する。ここで,V in は 簡 単 化 のため 定 電 圧 源 を 用 いる。<br />
3. 制 御 方 法<br />
〈3・1〉 出 力 電 圧 制 御<br />
コンデンサ C の 両 端 電 圧 である 出 力 電 圧 制 御 には PI 制 御<br />
を 用 いる。ここで 電 流 制 御 系 ACR は 電 圧 制 御 系 AVR の 応<br />
答 に 対 して 十 分 に 高 速 であると 仮 定 し,ゲイン1のシステ<br />
ムと 仮 定 する。<br />
(a) AVR (Auto Voltage Regulation).<br />
出 力 電 圧 はコンデンサ 電 流 I c により 決 定 する。ここで I c<br />
は(1) 式 となる。<br />
I<br />
c<br />
IL<br />
2<br />
I<br />
out<br />
.............................................................. (1)<br />
これより,チョッパ 出 力 電 流 I L2 により I c を 制 御 すること<br />
ができる。ここで 負 荷 電 流 I out を 外 乱 とする。しかし, 実 際<br />
に 制 御 できる 電 流 は 入 力 電 流 I L1 のみであるため,I L2 から I L1<br />
への 変 換 が 必 要 になる。<br />
図 3 に 入 力 電 流 とチョッパ 出 力 電 流 の 関 係 図 を 示 す。I L1<br />
は S w1 によりスイッチングされ,I L2 となる。これより,チ<br />
ョッパの 変 調 率 をとすると I L1 と I L2 の 関 係 は(2) 式 となる。<br />
I<br />
I<br />
...................................................................(2)<br />
L2 L1<br />
これより, 入 力 電 流 指 令 値 I L1 *は(3) 式 となる。<br />
1<br />
I L<br />
I<br />
<br />
1* L2<br />
*<br />
............................................................. (3)<br />
ここで, 変 調 率 はチョッパの 昇 圧 比 をで 表 すと 定 常 状<br />
態 では 1/と 等 しくなる。また, 電 圧 制 御 系 の 閉 ループ 伝 達<br />
関 数 伝 達 関 数 G V は(4) 式 となる。<br />
G<br />
V<br />
<br />
s<br />
2<br />
KVI<br />
C<br />
K<br />
PV<br />
K<br />
s <br />
C C<br />
IV<br />
........................................... (4)<br />
電 圧 制 御 系 AVR における PI 制 御 器 のゲイン K PV および<br />
K IV は AVR の 閉 ループ 伝 達 関 数 と 2 次 標 準 形 と 比 較 すること<br />
で 設 計 し, 式 (5)となる。<br />
(b) ACR (Auto Current Regulation).<br />
図 2 システムブロック 図<br />
Fig. 2. System block diagram.<br />
K<br />
PV<br />
2<br />
C,<br />
K<br />
nv<br />
IV<br />
<br />
2 nv<br />
C<br />
,<br />
.................................... (5)<br />
〈3・2〉 入 力 電 流 制 御<br />
リアクトル L に 流 入 する 入 力 電 流 制 御 には n サンプル<br />
で 制 御 対 象 を 指 令 値 に 追 従 することが 可 能 であるデッドビ<br />
ート 制 御 を 適 用 する。これは 電 圧 制 御 における 入 力 電 流 制<br />
御 の 影 響 を 小 さくするためである。<br />
ここで 電 流 制 御 系 には P 制 御 器 ,PI 制 御 器 ,IP 制 御 器 を<br />
用 いる。また, 図 2(b)より,それぞれの 制 御 器 を 用 いた 電 流<br />
制 御 系 の 離 散 閉 ループ 伝 達 関 数 G P ,G PI ,G IP を(6) 式 ,(7) 式 ,<br />
(8) 式 に 示 す。<br />
T<br />
K<br />
PP<br />
G<br />
P<br />
<br />
L<br />
..................................................(6)<br />
T<br />
z K<br />
PP<br />
1<br />
L<br />
G<br />
図 3 入 力 電 流 とチョッパ 出 力 電 流 の 関 係<br />
Fig. 3. Relation between the input current and chopper<br />
PI<br />
<br />
z<br />
2<br />
K<br />
(<br />
L<br />
output current.<br />
PIP<br />
T<br />
( z 1)<br />
K<br />
PIP<br />
K<br />
L<br />
K<br />
T 2) z 1<br />
L<br />
<br />
PIP<br />
PII<br />
<br />
K<br />
T <br />
L<br />
PII<br />
T<br />
<br />
<br />
<br />
K<br />
IPI 2<br />
T<br />
L1<br />
GIP <br />
(8)<br />
2 K<br />
IPD K<br />
IPD<br />
K<br />
IPI 2 <br />
z ( T 2) z 1<br />
T T <br />
L L L <br />
2<br />
(7)<br />
2/6