制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学
制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学
制御応答の高速化による直流コンデンサ容量の最小 ... - 長岡技術科学大学

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
SPC-12-026<br />
制 御 応 答 の 高 速 化 による 直 流 コンデンサ 容 量 の 最 小 化 の 検 討<br />
渋 谷 貴 之 * 伊 東 淳 一 ( 長 岡 技 術 科 学 大 学 )<br />
An Evaluation of Optimal Design of Capacitance<br />
by High Speed of a Control Response.<br />
Takayuki Shibuya, Jun-ichi Itoh (Nagaoka University of Technology)<br />
This paper describes an optimal design method for a current regulator and an output voltage regulator with a DC link capacitor in a<br />
boost-up chopper. In order to reduce the DC link capacitor and boost-up reactor, high speed response of the current regulator and the output<br />
voltage regulator are required. In this paper, the current controller is designed based on dead-beat control with P, PI or IP structure. Then, it<br />
is confirmed that the control response of dead –beat controller becomes 1/3.15 of the sampling frequency, which is the switching frequency.<br />
The minimum output capacitor is calculated by the control response of the output voltage regulator and the allowance of the voltage<br />
fluctuation. Moreover, the validities of the design method are confirmed by experimental results that the design values agree well with the<br />
analysis result with 8.53% error.<br />
キーワード: 昇 圧 チョッパ, 自 動 電 流 制 御 , 自 動 電 圧 制 御 ,デッドビート 制 御<br />
(Boost chopper, ACR, AVR, Deadbeat control)<br />
1. はじめに<br />
近 年 , 電 気 自 動 車 ( 以 下 EV),スマートグリッドをはじめ<br />
として 大 容 量 の DC-DC コンバータが 注 目 されている。また,<br />
DC-DC コンバータの 高 効 率 化 , 小 型 化 に 対 する 要 求 が 高 ま<br />
っており, 昇 圧 リアクトルや 平 滑 コンデンサなどの 受 動 素<br />
子 を 小 型 化 する 技 術 について 盛 んに 研 究 されている (1)-(5) 。<br />
EV や 太 陽 光 インバータで 使 用 される 昇 圧 チョッパでは,<br />
平 滑 コンデンサや 昇 圧 リアクトルを 小 型 化 すると 負 荷 ステ<br />
ップ 応 答 に 対 する 出 力 電 圧 変 動 や 入 力 電 圧 変 化 に 対 する 入<br />
力 電 流 の 変 動 は 大 きくなる。これを 抑 制 するためには, 電<br />
圧 制 御 , 電 流 制 御 の 高 速 化 が 有 効 である。<br />
DC-DC コンバータの 制 御 方 法 として, 制 御 器 に DSP や<br />
FPGA を 用 いたデジタル 制 御 を 適 用 する 研 究 が 盛 んに 行 わ<br />
れている (6)-(9) 。 近 年 , 特 に FPGA の 発 展 により 非 常 に 高 速 で<br />
制 御 することが 可 能 になっている。 従 来 , 電 流 制 御 として<br />
比 例 ゲインと 積 分 器 から 構 成 される PI 制 御 がよく 使 用 され<br />
ている。 一 方 ,デジタル 制 御 系 では,n サンプルで 目 標 値 に<br />
追 従 できるデッドビート 制 御 やマルチレートサンプリング<br />
などが 研 究 されており, 高 速 サンプリングより 高 性 能 化 を<br />
実 現 している。 確 かに FPGA による 高 速 サンプリングを 行<br />
うことで, 制 御 性 能 を 飛 躍 的 に 向 上 させることができるが,<br />
平 滑 コンデンサ 容 量 と 電 圧 制 御 応 答 の 関 係 は 明 確 化 されて<br />
いない。また, 実 際 には, 電 圧 制 御 応 答 には 限 界 があり,<br />
その 制 約 条 件 を 定 量 的 に 考 察 した 文 献 は 著 者 らの 知 る 限 り<br />
ない。<br />
本 論 文 では, 昇 圧 チョッパを 例 に 取 り, 電 流 制 御 と 電 圧<br />
制 御 の 設 計 法 とそれぞれの 応 答 限 界 について 考 察 する。 出<br />
力 電 圧 制 御 に PI 制 御 を 用 い, 入 力 電 流 の 制 御 には,P 制 御 ,<br />
図 1 2 象 限 昇 圧 チョッパ 回 路<br />
Fig. 1. Boost chopper circuit.<br />
PI 制 御 および IP 制 御 を 基 に 設 計 したデッドビート 制 御 器 を<br />
用 いた 場 合 について 見 当 する。 本 論 文 の 構 成 は, 以 下 のよ<br />
うになっている。まず, 各 制 御 系 の 設 計 指 針 について 述 べ<br />
る。 次 に, 入 力 電 流 のゲイン 特 性 から 最 適 なサンプリング<br />
周 波 数 を 選 定 する 方 法 について 述 べる。さらに,コンデン<br />
サ 容 量 を 出 力 電 圧 の 変 動 量 , 電 圧 制 御 系 の 固 有 角 周 波 数 か<br />
ら 設 計 する 方 法 について 述 べる。 最 後 に,シミュレーショ<br />
ンおよび 実 験 を 行 い,サンプリング 周 波 数 の 選 定 方 法 およ<br />
びコンデンサ 容 量 の 設 計 方 法 の 妥 当 性 を 検 証 する。<br />
2. 回 路 構 成<br />
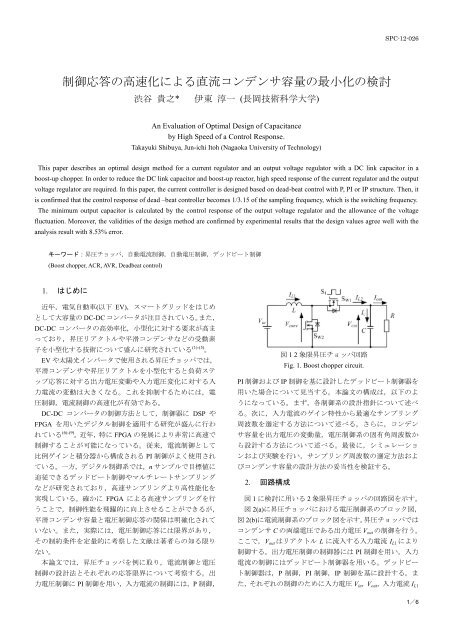
図 1 に 検 討 に 用 いる 2 象 限 昇 圧 チョッパの 回 路 図 を 示 す。<br />
図 2(a)に 昇 圧 チョッパにおける 電 圧 制 御 系 のブロック 図 ,<br />
図 2(b)に 電 流 制 御 系 のブロック 図 を 示 す。 昇 圧 チョッパでは<br />
コンデンサ C の 両 端 電 圧 である 出 力 電 圧 V out の 制 御 を 行 う。<br />
ここで,V out はリアクトル L に 流 入 する 入 力 電 流 I L1 により<br />
制 御 する。 出 力 電 圧 制 御 の 制 御 器 には PI 制 御 を 用 い, 入 力<br />
電 流 の 制 御 にはデッドビート 制 御 器 を 用 いる。デッドビー<br />
ト 制 御 器 は,P 制 御 ,PI 制 御 ,IP 制 御 を 基 に 設 計 する。ま<br />
た,それぞれの 制 御 のために 入 力 電 圧 V in ,V out , 入 力 電 流 I L1<br />
1/6
を 検 出 する。ここで,V in は 簡 単 化 のため 定 電 圧 源 を 用 いる。<br />
3. 制 御 方 法<br />
〈3・1〉 出 力 電 圧 制 御<br />
コンデンサ C の 両 端 電 圧 である 出 力 電 圧 制 御 には PI 制 御<br />
を 用 いる。ここで 電 流 制 御 系 ACR は 電 圧 制 御 系 AVR の 応<br />
答 に 対 して 十 分 に 高 速 であると 仮 定 し,ゲイン1のシステ<br />
ムと 仮 定 する。<br />
(a) AVR (Auto Voltage Regulation).<br />
出 力 電 圧 はコンデンサ 電 流 I c により 決 定 する。ここで I c<br />
は(1) 式 となる。<br />
I<br />
c<br />
IL<br />
2<br />
I<br />
out<br />
.............................................................. (1)<br />
これより,チョッパ 出 力 電 流 I L2 により I c を 制 御 すること<br />
ができる。ここで 負 荷 電 流 I out を 外 乱 とする。しかし, 実 際<br />
に 制 御 できる 電 流 は 入 力 電 流 I L1 のみであるため,I L2 から I L1<br />
への 変 換 が 必 要 になる。<br />
図 3 に 入 力 電 流 とチョッパ 出 力 電 流 の 関 係 図 を 示 す。I L1<br />
は S w1 によりスイッチングされ,I L2 となる。これより,チ<br />
ョッパの 変 調 率 をとすると I L1 と I L2 の 関 係 は(2) 式 となる。<br />
I<br />
I<br />
...................................................................(2)<br />
L2 L1<br />
これより, 入 力 電 流 指 令 値 I L1 *は(3) 式 となる。<br />
1<br />
I L<br />
I<br />
<br />
1* L2<br />
*<br />
............................................................. (3)<br />
ここで, 変 調 率 はチョッパの 昇 圧 比 をで 表 すと 定 常 状<br />
態 では 1/と 等 しくなる。また, 電 圧 制 御 系 の 閉 ループ 伝 達<br />
関 数 伝 達 関 数 G V は(4) 式 となる。<br />
G<br />
V<br />
<br />
s<br />
2<br />
KVI<br />
C<br />
K<br />
PV<br />
K<br />
s <br />
C C<br />
IV<br />
........................................... (4)<br />
電 圧 制 御 系 AVR における PI 制 御 器 のゲイン K PV および<br />
K IV は AVR の 閉 ループ 伝 達 関 数 と 2 次 標 準 形 と 比 較 すること<br />
で 設 計 し, 式 (5)となる。<br />
(b) ACR (Auto Current Regulation).<br />
図 2 システムブロック 図<br />
Fig. 2. System block diagram.<br />
K<br />
PV<br />
2<br />
C,<br />
K<br />
nv<br />
IV<br />
<br />
2 nv<br />
C<br />
,<br />
.................................... (5)<br />
〈3・2〉 入 力 電 流 制 御<br />
リアクトル L に 流 入 する 入 力 電 流 制 御 には n サンプル<br />
で 制 御 対 象 を 指 令 値 に 追 従 することが 可 能 であるデッドビ<br />
ート 制 御 を 適 用 する。これは 電 圧 制 御 における 入 力 電 流 制<br />
御 の 影 響 を 小 さくするためである。<br />
ここで 電 流 制 御 系 には P 制 御 器 ,PI 制 御 器 ,IP 制 御 器 を<br />
用 いる。また, 図 2(b)より,それぞれの 制 御 器 を 用 いた 電 流<br />
制 御 系 の 離 散 閉 ループ 伝 達 関 数 G P ,G PI ,G IP を(6) 式 ,(7) 式 ,<br />
(8) 式 に 示 す。<br />
T<br />
K<br />
PP<br />
G<br />
P<br />
<br />
L<br />
..................................................(6)<br />
T<br />
z K<br />
PP<br />
1<br />
L<br />
G<br />
図 3 入 力 電 流 とチョッパ 出 力 電 流 の 関 係<br />
Fig. 3. Relation between the input current and chopper<br />
PI<br />
<br />
z<br />
2<br />
K<br />
(<br />
L<br />
output current.<br />
PIP<br />
T<br />
( z 1)<br />
K<br />
PIP<br />
K<br />
L<br />
K<br />
T 2) z 1<br />
L<br />
<br />
PIP<br />
PII<br />
<br />
K<br />
T <br />
L<br />
PII<br />
T<br />
<br />
<br />
<br />
K<br />
IPI 2<br />
T<br />
L1<br />
GIP <br />
(8)<br />
2 K<br />
IPD K<br />
IPD<br />
K<br />
IPI 2 <br />
z ( T 2) z 1<br />
T T <br />
L L L <br />
2<br />
(7)<br />
2/6
ここで, 図 2(b-2)の PI 制 御 系 における 目 標 値 フィルタは<br />
制 御 系 のゼロ 点 を 打 ち 消 すフィルタである。また,T はサン<br />
プリング 時 間 とする。これより,それぞれの 閉 ループ 伝 達<br />
関 数 における 極 がすべてゼロになるようにそれぞれの 制 御<br />
器 のゲインを 設 計 し,デッドビート 制 御 を 実 現 する。その<br />
結 果 G P =1/z,G PI =G IP =1/z 2 となり,P 制 御 系 は 1 サンプル<br />
後 に 指 令 値 に 追 従 ,PI 制 御 系 ,IP 制 御 系 は 2 サンプル 後 に<br />
指 令 値 に 追 従 するシステムとなる。<br />
〈3・3〉 電 流 制 御 におけるサンプリング 周 波 数 選 定<br />
本 章 では 電 流 制 御 にデッドビート 制 御 を 適 用 した 際 のサ<br />
ンプリング 周 波 数 の 選 定 法 について 検 討 を 行 う。<br />
図 4 にデッドビート 応 答 の 近 似 モデルのタイミングチャ<br />
ートを 示 す。ここで 電 流 指 令 値 を 振 幅 I m の 正 弦 波 とする。P<br />
制 御 系 は 1 サンプル 後 に 指 令 値 に 追 従 ,PI 制 御 系 ,IP 制 御<br />
系 は 2 サンプル 後 に 指 令 値 に 追 従 するシステムである。こ<br />
のため PI 制 御 ,IP 制 御 系 の 波 形 は P 制 御 の 1 サンプル 遅 れ<br />
の 結 果 であり,ゲイン 特 性 は 同 じ 結 果 になる。<br />
図 5 にサンプリング 周 波 数 f s に 対 して 電 流 指 令 値 周 波 数<br />
f ref を 変 動 させたときの I L1 のゲイン 特 性 を 示 す。これより,<br />
サンプリング 周 波 数 が 指 令 値 周 波 数 に 対 して 高 いときゲイ<br />
ン 低 下 は 抑 制 されていることが 確 認 できる。ここで,ゲイ<br />
ン 低 下 許 容 を 3dB と 仮 定 すると,f ref / f s = 1/3.15 となる。し<br />
たがって,このときの 指 令 値 周 波 数 f ref を 所 望 の 電 流 制 御 応<br />
答 周 波 数 f d とすると,f s は f d の 3.15 倍 程 度 に 設 計 する 必 要<br />
がある。<br />
〈3・4〉 出 力 電 圧 変 動 とコンデンサ 容 量 の 関 係<br />
コンデンサ 両 端 の 出 力 電 圧 は 負 荷 変 動 により 変 動 する。<br />
本 節 では 負 荷 電 流 I out がステップ 変 動 したときの 電 圧 変 動 と<br />
コンデンサ, 電 圧 制 御 応 答 の 関 係 の 定 式 化 を 行 う。ここで,<br />
電 流 制 御 系 ACR の 応 答 は 電 圧 制 御 系 AVR の 応 答 よりも 十<br />
分 に 高 速 であると 仮 定 し,ACR のゲインは1,つまり I L2 *<br />
=I L2 と 仮 定 する。 負 荷 電 流 を 入 力 とした 場 合 の 外 乱 閉 ルー<br />
プ 伝 達 関 数 G load (s)は(9) 式 となる。<br />
G<br />
load<br />
1<br />
s<br />
( s)<br />
<br />
C ......................................(9)<br />
2<br />
s 2 s <br />
nv<br />
2<br />
nv<br />
ここで, 減 衰 係 数 z は 0.707 とし, 固 有 角 周 波 数 nv は 設<br />
計 値 とする。したがって,G load (s)の 単 位 ステップ 応 答 C load (t)<br />
は(10) 式 となる。<br />
C<br />
load<br />
( t)<br />
L<br />
-1<br />
<br />
G<br />
<br />
<br />
C<br />
load<br />
nv<br />
1<br />
( s)<br />
<br />
s<br />
<br />
1<br />
e<br />
2<br />
1<br />
<br />
sin<br />
<br />
<br />
1<br />
t <br />
<br />
<br />
nt<br />
2<br />
nv<br />
..... (10)<br />
出 力 電 圧 変 動 の 最 大 値 は 単 位 ステップ 応 答 におけるオー<br />
バーシュートと 同 等 になる。したがって 最 大 電 圧 変 動 量<br />
V out は(10) 式 を 微 分 し 傾 きがゼロとなる 時 間 で 求 まり,この<br />
ときの 時 間 T p は(11) 式 となる。<br />
T p<br />
<br />
<br />
nv<br />
1<br />
1<br />
<br />
tan<br />
1<br />
( <br />
2 <br />
2<br />
1<br />
<br />
)<br />
............................ (11)<br />
これより 負 荷 電 流 ステップI out によるV out は(10) 式 に(11)<br />
式 を 代 入 することで 求 まり,(12) 式 となる。<br />
V<br />
out<br />
I<br />
out<br />
<br />
e<br />
2<br />
C<br />
1 <br />
nv<br />
K<br />
a<br />
<br />
C<br />
nv<br />
I<br />
out<br />
2 <br />
1<br />
1<br />
<br />
tan <br />
2<br />
1<br />
<br />
<br />
<br />
1<br />
sin tan<br />
<br />
<br />
2<br />
1 <br />
<br />
<br />
<br />
<br />
<br />
..................................................................................... (12)<br />
ここで,I out は 負 荷 電 流 のステップ 変 化 量 である。また,<br />
K a に 含 まれるは 定 数 であるため 一 定 となる。よって 電 圧 変<br />
動 量 V out はコンデンサ C と 固 有 角 周 波 数 nv に 反 比 例 の 関<br />
係 となる。これより C は 許 容 電 圧 変 動 と nv から 求 まり,(13)<br />
式 となる。<br />
C<br />
図 4 入 力 電 流 タイミングチャート<br />
Fig. 4. Timing chart of input current.<br />
図 5 電 流 近 似 モデルゲイン 特 性<br />
Fig. 5. Gain characteristic by sampling frequency.<br />
I<br />
out a<br />
............................................................(13)<br />
out<br />
K<br />
V<br />
<br />
nv<br />
(13) 式 より,コンデンサ 容 量 の 設 計 が 可 能 である。<br />
4. シミュレーション 結 果<br />
〈4・1〉 電 流 制 御 系 におけるゲイン 特 性<br />
3/6
本 節 では 3 章 において 導 出 したサンプリング 周 波 数 の 妥<br />
当 性 を 示 す。ここでシミュレーション 条 件 は, 入 力 電 圧 V in =<br />
1p.u., 出 力 電 圧 V out = 2p.u., 入 力 電 流 振 幅 I m = 1p.u.,リアク<br />
トル L = 0.16msec である。また,それぞれの 制 御 系 のサンプ<br />
リング 周 波 数 を 目 標 の 応 答 周 波 数 f s = 3.15f ref とする。なお,<br />
それぞれのパラメータは 入 力 電 圧 V in =25V,および 定 格 電 流<br />
I n =4A で 基 準 化 した 値 である。<br />
図 6 にシミュレーションにおける 入 力 電 流 I L1 の 周 波 数 応<br />
答 を 示 す。 結 果 より, 指 令 値 周 波 数 f ref が 所 望 応 答 周 波 数 f d<br />
に 近 づくことでゲイン 特 性 が 低 下 していることがわかる。<br />
また,P 制 御 ,PI 制 御 ,IP 制 御 のすべての 制 御 系 において,<br />
f ref = f d で 設 定 したゲイン 低 下 許 容 3dB とほぼ 一 致 している<br />
ことが 確 認 できる。 以 上 より, 制 御 系 の 形 によらず,ゼロ<br />
点 を 含 まないデッドビート 制 御 系 では f s を f d の 3.15 倍 程 度<br />
に 設 定 すればよいことがわかる。<br />
〈4・2〉 出 力 電 圧 応 答 特 性<br />
本 節 では 3 章 において 検 討 した 出 力 電 圧 変 動 量 V out とコ<br />
ンデンサ 容 量 および 固 有 角 周 波 数 との 関 係 性 について 検 討<br />
する。ここでシミュレーション 条 件 は, 入 力 電 圧 V in = 1p.u.,<br />
リアクトル L = 0.32msec,コンデンサ 容 量 C = 11.3msec, 電<br />
圧 制 御 固 有 角 周 波 数 nv = 100rad/sec, 電 流 制 御 固 有 角 周 波 数<br />
d = 2πf d = 20000rad/sec,サンプリング 周 波 数 f s = 3.15f d =<br />
10kHz とした。<br />
図 7 に 出 力 電 圧 指 令 値 V out *を 2p.u.から 2.4p.u.へ 変 動 させ<br />
たときの 出 力 電 圧 応 答 および 電 流 応 答 の 結 果 を 示 す。ここ<br />
で,V out_ideal は 理 想 モデルの 制 御 ブロック 図 より 取 得 した 出<br />
力 電 圧 である。その 結 果 ,V out は V out_ideal とほぼ 一 致 するこ<br />
とから 制 御 系 は 設 計 通 りの 応 答 を 得 られていることを 確 認<br />
した。<br />
図 8 に 負 荷 電 流 I out を 0p.u.から 0.5 p.u.へステップ 変 化 さ<br />
せたときの 電 圧 応 答 および 電 流 応 答 の 結 果 を 示 す。これよ<br />
り, 負 荷 電 流 ステップによる 電 圧 変 動 量 V out は 0.199p.u.,<br />
V out_ideal = 0.203p.u.であり, 電 圧 変 動 誤 差 は 1.97%であるこ<br />
とを 確 認 した。<br />
図 9 に 負 荷 ステップ 応 答 において 電 圧 制 御 固 有 角 周 波 数<br />
nv を 変 化 させたときの 電 圧 変 動 を 示 す。これより,(11) 式<br />
より 算 出 したV out_cal は 理 想 モデル 電 圧 変 動 とほぼ 一 致 する<br />
ことが 確 認 できる。また, 計 算 式 同 様 にV out_cal は nv に 反 比<br />
例 することを 確 認 した。したがって 算 出 した 出 力 電 圧 変 動<br />
式 の 妥 当 性 を 確 認 した。ここで,シミュレーションモデル<br />
が 理 想 モデルや 計 算 結 果 と 誤 差 が 発 生 している 原 因 は 本 来<br />
入 力 電 流 指 令 I L1 *は I L2 *に 対 し 変 調 率 で 補 償 するところを<br />
本 制 御 では 定 常 状 態 における 変 調 率 = 1/で 補 償 している<br />
ためである。<br />
図 10 に 電 圧 変 動 V out を 0.2p.u.と 設 定 したとき 負 荷 電 流 ス<br />
テップによる 電 圧 変 動 をグラフ 化 した 結 果 を 示 す。ここで<br />
コンデンサ 容 量 は(12) 式 から 設 計 を 行 った。また,このとき<br />
の 電 圧 制 御 固 有 角 周 波 数 nv は 50rad/sec , 100rad/sec ,<br />
200rad/sec とする。シミュレーションと 計 算 結 果 に 若 干 誤 差<br />
が 発 生 しているのは 上 記 の 補 償 法 が 影 響 しているためであ<br />
図 6 入 力 電 流 ゲイン 特 性<br />
Fig. 6. Gain characteristic of the input current.<br />
る。これより,(12) 式 を 用 いることで 電 圧 変 動 と 電 圧 固 有 角<br />
周 波 数 からコンデンサ 容 量 を 設 計 することが 可 能 であるこ<br />
とを 確 認 した。<br />
図 7 電 圧 ステップ 応 答<br />
Fig. 7. Voltage step response.<br />
図 8 負 荷 電 流 ステップ 応 答<br />
Fig. 8. Load current step response.<br />
図 9 負 荷 電 流 ステップ 変 化 による 電 圧 変 動 量<br />
Fig. 9. The output voltage fluctuation by load current step<br />
(C =1800F).<br />
4/6
〈4・3〉 電 圧 制 御 系 の 最 大 固 有 角 周 波 数 の 検 討<br />
前 節 までの 考 察 により, 電 圧 制 御 の 固 有 角 周 波 数 nv によ<br />
り, 平 滑 コンデンサの 値 は 定 まることがわかった。しかし,<br />
制 御 遅 れや 操 作 量 の 飽 和 により, 電 圧 制 御 固 有 角 周 波 数 を<br />
高 くすることには 限 界 がある。ここでは 電 流 制 御 系 はデッ<br />
ドビート 制 御 を 仮 定 し,1/z と 置 いて, 制 御 遅 れを 模 擬 して<br />
いる。デッドビート 制 御 は 1 サンプル 以 内 に 電 流 が 指 令 値<br />
に 追 従 させなくてはならない。しかし, 電 流 の 変 化 率 は 昇<br />
圧 リアクトルと 電 源 電 圧 により 制 限 される。すなわち,1 サ<br />
ンプル 以 内 で 追 従 させるには, 電 流 のステップ 幅 は V in T/L<br />
以 下 でなくてはならない。ここでは 制 御 余 裕 をみて, 負 荷<br />
電 流 のステップ 変 化 幅 をI out = 0.8V in T/L とした。<br />
図 11 に 電 圧 制 御 固 有 角 周 波 数 nv を 変 化 させたときのシ<br />
ミュレーションによって 求 めた 出 力 電 圧 変 動 量 V out を 示<br />
す。 結 果 より,V outは nv が 1000rad/sec 付 近 から 計 算 によ<br />
り 算 出 した 結 果 に 対 し 誤 差 が 大 きくなり,3000rad/sec 付 近<br />
でそれ 以 上 電 圧 変 動 を 抑 えることができなくなる。サンプ<br />
リング 周 波 数 は 10kHz であるので,サンプリング 周 波 数 の<br />
約 1/20 付 近 で 飽 和 する。これは nv が 高 くなることにより 電<br />
流 制 御 系 の 制 御 遅 れによって 電 圧 制 御 系 の 応 答 が 遅 くなる<br />
ためである。したがって, 電 圧 制 御 系 の 応 答 周 波 数 はスイ<br />
ッチング 周 波 数 の 1/20 程 度 が 限 界 である。<br />
5. 実 験 結 果<br />
本 章 では 実 験 による 基 本 動 作 検 証 および 3 章 で 検 討 した<br />
コンデンサ 容 量 の 設 計 による 電 圧 変 動 について 検 討 を 行<br />
う。ここで,シミュレーションおよび 実 験 における 負 荷 電<br />
流 のステップは 負 荷 抵 抗 のステップ 変 化 で 模 擬 した。また,<br />
実 験 条 件 は, 入 力 電 圧 V in = 1p.u., 出 力 電 圧 V out = 2p.u.,リ<br />
アクトル L = 0.8msec,サンプリング 周 波 数 fs = 3.15f d =<br />
10kHz, 負 荷 抵 抗 R=4p.u.である。なお,それぞれのパラメ<br />
ータは 入 力 電 圧 V in =25V,および 定 格 電 流 I n =4A で 基 準 化 し<br />
た 値 である。<br />
図 12 に 出 力 電 圧 指 令 値 V out *を 2p.u から 2.4p.u.へステッ<br />
プ 変 化 させたときの 応 答 特 性 を 示 す。その 結 果 , 出 力 電 圧<br />
応 答 における 行 き 過 ぎ 時 間 T ps は 42.4msec であることを 確<br />
認 した。2 次 標 準 形 のステップ 応 答 における 行 き 過 ぎ 時 間<br />
T ps_ideal は 44.4msec であることから, 実 機 の 制 御 系 の 応 答 は<br />
誤 差 4.5%であり, 大 概 設 計 通 りの 応 答 を 得 られていること<br />
が 確 認 できる。<br />
図 13 に 負 荷 抵 抗 R を 0p.u.から 4p.u.へステップ 変 化 させ<br />
たときの 応 答 波 形 を 示 す。これより, 負 荷 電 流 ステップに<br />
よる 電 圧 変 動 量 V out は 1.86p.u.であることを 確 認 した。(12)<br />
式 より 算 出 したV out_cal =0.203p.u.である。したがって, 計 算<br />
式 との 誤 差 は 8.53%である。<br />
図 14 に 負 荷 抵 抗 R を 0p.u.から 4p.u.へステップ 変 化 させ<br />
たときの 電 圧 変 動 量 の 電 圧 変 動 量 をグラフ 化 したものを 示<br />
す。 結 果 より,シミュレーション 値 および 実 験 値 のV out は<br />
低 電 圧 制 御 固 有 角 周 波 数 において 計 算 値 より 変 動 量 が 小 さ<br />
いことを 確 認 した。これは 検 討 では 純 粋 な 負 荷 電 流 ステッ<br />
図 10 負 荷 電 流 ステップ 変 化 による 電 圧 変 動 量<br />
Fig. 10. Output voltage fluctuation by load current step<br />
(V out =0.2p.u.).<br />
図 11 固 有 角 周 波 数 に 対 する 電 圧 変 動 量<br />
Fig. 11. Output voltage fluctuation for nv .<br />
図 12 電 圧 ステップ 応 答<br />
Fig. 12.Voltage step response.<br />
図 13 負 荷 抵 抗 ステップによる 電 圧 応 答 波 形<br />
Fig. 13. Voltage response by load resistance step response.<br />
5/6
プではなく, 負 荷 抵 抗 ステップによる 模 擬 を 行 っているこ<br />
とによる 影 響 である。また,コンデンサの 等 価 直 列 抵 抗<br />
(ESR)の 影 響 , 変 換 器 の 損 失 によるダンピング 効 果 , 使 用<br />
したコンデンサ 容 量 の 誤 差 などがある。<br />
図 15 に 電 圧 変 動 V ou を 0.2p.u.と 設 定 したとき 負 荷 抵 抗 ス<br />
テップによる 電 圧 変 動 をグラフ 化 した 結 果 を 示 す。これよ<br />
り, 算 出 したV out は 計 算 式 に 対 し 低 い 値 となっていること<br />
がわかる。 誤 差 の 原 因 は 先 述 の 影 響 が 現 れているためであ<br />
る。<br />
6. まとめ<br />
本 論 文 では, 昇 圧 チョッパの 電 流 制 御 系 と 出 力 電 圧 制<br />
御 系 の 限 界 応 答 設 計 について 述 べた。 入 力 電 流 制 御 にデ<br />
ッドビート 制 御 器 を 用 いたとき, 目 標 とする 応 答 周 波 数<br />
f d の 3.15 倍 程 度 以 上 にサンプリング 周 波 数 (キャリア 周<br />
波 数 )を 設 定 すればよいことを 明 らかにした。<br />
また, 電 圧 制 御 系 において 負 荷 電 流 ステップ 入 力 時 に<br />
おける 出 力 電 圧 変 動 量 と 電 圧 制 御 固 有 角 周 波 数 ,コンデ<br />
ンサ C の 関 係 性 を 定 式 化 し,これらの 関 係 を 明 らかにし<br />
た。また,シミュレーションにより, 電 圧 制 御 固 有 角 周<br />
波 数 は 1000rad/sec 以 下 である 必 要 があることを 明 らかに<br />
した。さらに 検 証 実 験 を 行 い, 電 圧 変 動 値 を 0.2p.u., 固<br />
有 角 周 波 数 を 100rad/sec としたとき, 電 圧 変 動 誤 差 は 設 計<br />
値 に 対 して 8.53%であり,おおむね 理 論 と 一 致 している。<br />
以 上 より,これらの 設 計 指 針 の 有 効 性 を 確 認 した。<br />
文<br />
(1) K. Kouno, Y. Ishiyama, M. Yamamoto:“Optimum Design of Trans-linked<br />
method single phase interleaved PFC converter”, JIASC IEEJ,H23,1-74<br />
河 野 研 太 , 石 倉 祐 樹 , 山 本 真 義 :「トランスリンク 方 式 単 層 インター<br />
リーブ PFC コンバータの 最 適 設 計 方 法 」 平 成 23 年 産 業 応 用 部 門 大<br />
会 1-74<br />
(2) T. Fushimi, H. Haga, S. Kondo:“Control Method of Electrolytic Capacitor<br />
Less Buck-boost Converter for Single-phase UPS”, JIASC IEEJ,H23,<br />
1-82<br />
伏 見 高 明 , 芳 賀 仁 , 近 藤 正 示 :「 電 解 コンデンサレス 昇 降 圧 チョッパ<br />
を 用 いた 常 時 商 用 単 層 UPS の 小 型 化 への 検 討 」<br />
平 成 23 年 産 業 応 用 部 門 大 会 1-82<br />
(3) Y. Nakamura, M. Nakahama, M. Yamamoto:“Frequency Property Analysis<br />
of Multi-phase Boost Chopper Circuit”, IEEJ annual meeting,H22,<br />
4-009<br />
中 村 祐 太 , 中 浜 真 之 , 山 本 真 義 :「マルチフェーズ 昇 圧 チョッパ 回 路<br />
の 周 波 数 特 性 解 析 」 平 成 22 年 電 気 学 会 全 国 大 会 大 会 4-009<br />
(4) T. Mishima, M. Hattori, D. Tukiyama, Shuuji Miyake, M. Nakaoka:<br />
“Optimum Design of Trans-linked method single phase interleaved PFC<br />
converter”, IEEJ annual meeting,H22,4-014<br />
三 島 智 和 , 服 部 将 之 , 築 山 大 輔 , 三 宅 修 二 , 中 岡 睦 雄 :「トランスリン<br />
ク 方 式 単 層 インターリーブ PFC コンバータの 最 適 設 計 方 法 」 平 成 22<br />
年 電 気 学 会 全 国 大 会 大 会 4-014<br />
(5) K. Mathuura, J. Itoh:“A Loss Analysis of a 3-Level switched capacitor<br />
DC-DC Converter”, SPC-11-098<br />
松 浦 浩 一 , 伊 東 淳 一 :「 低 インダクタによる 高 昇 圧 比 向 け DC-DC コ<br />
ンバータの 基 礎 検 討 」, 半 導 体 電 力 変 換 研 究 会 ,SPC-10-104(2010)<br />
(6) T. Yokoyama, T. Komiyama, E. Shimada:Current Control for Utility<br />
Interactive Inverter Using Multisampling Method Based on FPGA” IEEJ<br />
Trans.1A, Vol.130, No.1, 2010, pp.51-59<br />
献<br />
図 14 負 荷 抵 抗 ステップ 変 化 による 電 圧 変 動 量<br />
Fig. 14. Output voltage fluctuation by load resistance<br />
step (C =1800F).<br />
図 15 負 荷 抵 抗 ステップ 変 化 による 電 圧 変 動 量<br />
Fig. 15. Output voltage fluctuation by load resistance<br />
step (V out =0.2p.u.).<br />
横 山 智 樹 , 小 宮 山 剛 , 島 田 永 悟 「FPGA によるマルチサンプリ<br />
ングを 適 用 した 単 相 系 統 連 系 インバータの 電 流 制 御 」 電 学 論 D,<br />
Vol.130, No.1, 2010, pp.51-59<br />
(7) H. Abe, H. Fujimoto” Perfect Tracking Control of Single Phase<br />
Inverter with Inter Sampling for Arbitary Waveform”JIASC IEEJ, H18<br />
安 部 洋 則 , 藤 本 博 志 , " 任 意 波 形 に 対 するインターサンプリング<br />
を 用 いた 単 相 インバータの 完 全 追 従 制 御 ", 平 成 18 年 産 業 応 用 部<br />
門 大 会<br />
(8) 渋 谷 貴 之 , 野 下 裕 市 , 伊 東 淳 一 : 「 昇 圧 チョッパにおけるデッドビー<br />
ト 制 御 による 電 流 応 答 限 界 に 関 する 考 察 」 電 気 関 係 学 会 北 陸 支 部 連<br />
合 大 会 A-64(2011)<br />
(9) 渋 谷 貴 之 , 野 下 裕 市 , 伊 東 淳 一 : 「 昇 圧 チョッパにおける 電 流 制 御<br />
系 のサンプリング 周 波 数 選 定 法 に 関 する 考 察 」 平 成 23 年 度 電 気 学<br />
会 東 京 支 部 新 潟 支 所 研 究 発 表 会 ,Ⅳ-06(2011)<br />
6/6