FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
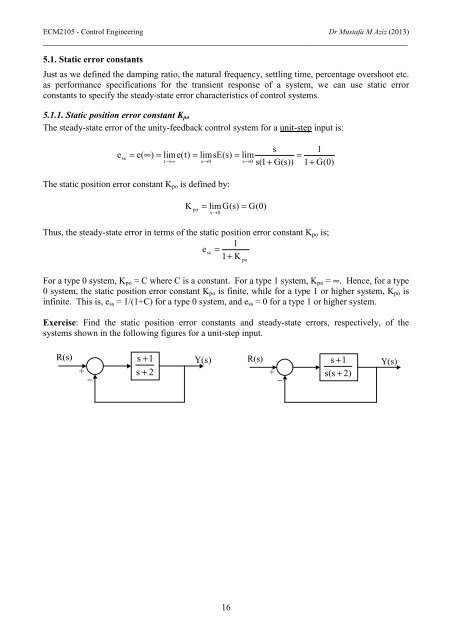
ECM2105 - Control Engineering Dr Mustafa M Aziz (2013)________________________________________________________________________________5.1. Static error constantsJust as we defined the damping ratio, the natural frequency, settling time, percentage overshoot etc.as performance specifications for the transient response of a system, we can use static errorconstants to specify the steady-state error characteristics of control systems.5.1.1. Static position error constant K poThe steady-state error of the unity-feedback control system for a unit-step input is:esss= e( ∞)= lime(t) = limsE(s) = limt→∞s→0s→0s(1 + G(s))1=1+G(0)The static position error constant K po is defined by:K limG(s) = G(0)po=s → 0Thus, the steady-state error in terms of the static position error constant K po is;1ess=1+KFor a type 0 system, K po = C where C is a constant. For a type 1 system, K po = ∞. Hence, for a type0 system, the static position error constant K po is finite, while for a type 1 or higher system, K po isinfinite. This is, e ss = 1/(1+C) for a type 0 system, and e ss = 0 for a type 1 or higher system.Exercise: Find the static position error constants and steady-state errors, respectively, of thesystems shown in the following figures for a unit-step input.poR(s)+−s + 1s + 2Y(s)R(s)+−s + 1s(s + 2)Y(s)16