FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
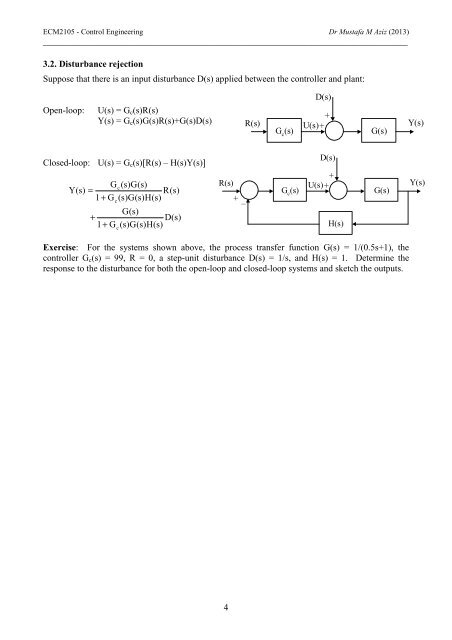
ECM2105 - Control Engineering Dr Mustafa M Aziz (2013)________________________________________________________________________________3.2. Disturbance rejectionSuppose that there is an input disturbance D(s) applied between the controller and plant:D(s)Open-loop:U(s) = G c (s)R(s)Y(s) = G c (s)G(s)R(s)+G(s)D(s)R(s)G c(s)+U(s) +G(s)Y(s)Closed-loop: U(s) = G c (s)[R(s) – H(s)Y(s)]Gc(s)G(s)Y(s) =R(s)1+G (s)G(s)H(s)cG(s)+D(s)1+G (s)G(s)H(s)cR(s)D(s)+U(s) +G c(s)+ –H(s)G(s)Y(s)Exercise: For the systems shown above, the process transfer function G(s) = 1/(0.5s+1), thecontroller G c (s) = 99, R = 0, a step-unit disturbance D(s) = 1/s, and H(s) = 1. Determine theresponse to the disturbance for both the open-loop and closed-loop systems and sketch the outputs.4