FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS
FEEDBACK CONTROL SYSTEMS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
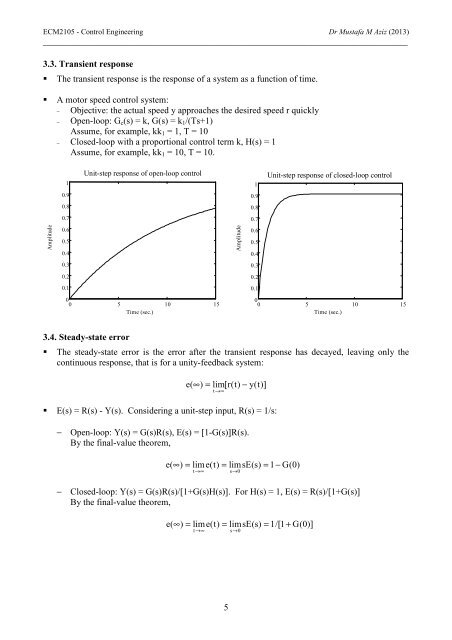
ECM2105 - Control Engineering Dr Mustafa M Aziz (2013)________________________________________________________________________________3.3. Transient responseThe transient response is the response of a system as a function of time.A motor speed control system:− Objective: the actual speed y approaches the desired speed r quickly− Open-loop: G c (s) = k, G(s) = k 1 /(Ts+1)Assume, for example, kk 1 = 1, T = 10− Closed-loop with a proportional control term k, H(s) = 1Assume, for example, kk 1 = 10, T = 10.1Unit-step response of open-loop control1Unit-step response of closed-loop control0.90.90.80.80.70.7Amplitude0.60.50.4Amplitude0.60.50.40.30.30.20.20.10.100 5 10 15Time (sec.)00 5 10 15Time (sec.)3.4. Steady-state errorThe steady-state error is the error after the transient response has decayed, leaving only thecontinuous response, that is for a unity-feedback system:e( ∞)= lim[r(t) − y(t)]t→∞E(s) = R(s) - Y(s). Considering a unit-step input, R(s) = 1/s:− Open-loop: Y(s) = G(s)R(s), E(s) = [1-G(s)]R(s).By the final-value theorem,e( ∞)= lime(t) = limsE(s) = 1−G(0)t→∞− Closed-loop: Y(s) = G(s)R(s)/[1+G(s)H(s)]. For H(s) = 1, E(s) = R(s)/[1+G(s)]By the final-value theorem,s→0e( ∞)= lime(t) = limsE(s) = 1/[1 + G(0)]t→∞s→05