Leakage-aware energy synchronization for wireless sensor networks
Leakage-aware energy synchronization for wireless sensor networks
Leakage-aware energy synchronization for wireless sensor networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
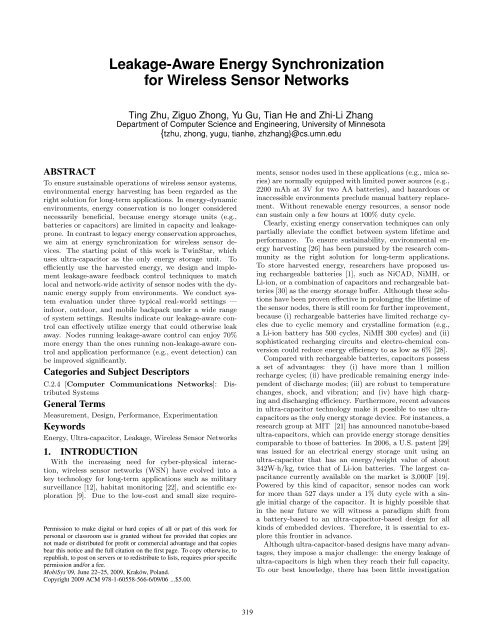
<strong>Leakage</strong> Power (mW)1098765432122F33F50F100F10 −1 10 0 10 1 10 2 10 3Time (Hour)010 −1 10 0 10 1 10 2 10 3Time (Hour)(a) Small Capacitance (b) Large CapacitanceFigure 4: <strong>Leakage</strong> Power vs. Timethis big uncertainty would lead to ineffective <strong>energy</strong> control.Impact of Battery Type: We also conducted a series ofexperiments to investigate the consistency of battery modelsover different battery types. In this study, three differenttypes of the batteries are investigated: Li-ion, NiCADand NiMH. Comparing Figures 2a, 2b, and 2c indicates thatdifferent types of the batteries have different discharge characteristicsand different capacities. In other words, thereis no single battery model that can be applied to differentbattery types. For example, when a <strong>sensor</strong> node runs underthe 1%-LED workload, remaining <strong>energy</strong> under 2.7V is 3.8kJ, 10.55 kJ, and 22.16 kJ <strong>for</strong> Li-ion, NiCAD, and NiMHbatteries, respectively.Figure 2 also shows that the discharge curves <strong>for</strong> differentbatteries exhibit deep slopes within a certain voltage range,in which a small error in voltage reading would be amplifiedinto a large error in estimating remaining <strong>energy</strong>. Forexample, as shown in Figure 2b, an 0.1V error would betranslated into a 200% <strong>energy</strong> difference between 2.4V and2.5V readings.<strong>Leakage</strong> Power (mW)150120906030650F2000F3000F2.2 <strong>Leakage</strong> in the Energy StoragesThis section presents our empirical study on the leakageprofile of batteries and ultra-capacitors. We conducted experimentsover a period of 6 weeks, using different typesof batteries and ultra-capacitors. Our empirical study concludesthat (i) ultra-capacitors are a good substitute <strong>for</strong> batteriesand (ii) <strong>energy</strong> leakage in ultra-capacitors should notbe overlooked.<strong>Leakage</strong> Profile Comparison: To simplify the comparisonagainst ultra-capacitors, Li-ion batteries are chosen asrepresentatives of the other batteries. We conducted leakageprofile comparisons between Li-ion batteries and a 2,000Fultra-capacitor over a period of 2 months after they arefully charged. For Li-ion battery, the leakage rate is 8% permonth. The 2,000F ultra-capacitor has a very high leakagerate (43.8%) during the first month, but low leakage rate(5.26%) during the second month. At the end of the secondmonth, the ultra-capacitor still has 1.9V of remainingvoltage. These results indicate that ultra-capacitors haveleakage per<strong>for</strong>mance that is comparable to that of batterieswhen voltage is controlled under an appropriate level. However,ultra-capacitors suffer severe <strong>energy</strong> leakage when it ischarged to the limit.<strong>Leakage</strong> of Ultra-Capacitors: In this experiment, seventypes of ultra-capacitors are used, ranging from 22F to3000F. After an ultra-capacitor was fully charged, we isolatedit and continuously monitored its remaining voltageover 1000 hours. Figure 4 reveals that (i) the leakage powerreduces over time after the initial charge, and (ii) leakageis more severe <strong>for</strong> larger ultra-capacitors than <strong>for</strong> smallerultra-capacitors. For example, at 2.7V, the leakage power ofa 3,000F capacitor is about 17 times of that of a 100F.<strong>Leakage</strong> Power (mW)1098765432122F33F50F100F0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8Voltage Measured (V)01.8 2 2.2 2.4 2.6 2.8Voltage Measured (V)(a) Small Capacitance (b) Large CapacitanceFigure 5: <strong>Leakage</strong> Power vs. VoltagesRemaining Energy (J)160140120<strong>Leakage</strong> Power (mW)150120906030650F2000F3000FWith <strong>Leakage</strong>Without <strong>Leakage</strong>1008060402000 10 20 30 40 50 60 70Time (Hour)Figure 6: Remaining Energy Vs. TimeWe also investigated the correlation between the voltageand leakage of ultra-capacitors. Figure 5 shows that whenthe voltage of ultra-capacitors approaches its limit, the valueof leakage power increases significantly. For example, whenthe voltage of the 100F ultra-capacitor increases to 2.7V, itsleakage power is 8.4 mW, which is equivalent to the powerneeded <strong>for</strong> powering a Telos node to work under more than13% duty cycle.Lifetime Difference due to <strong>Leakage</strong>: With the empiricaldata collected, we simulate the lifetime of a node consideringleakage. Figure 6 compares the remaining <strong>energy</strong> insidethe ideal non-leaking ultra-capacitor and the real ultracapacitorwith leakage. Here we use a fully charged 50Fultra-capacitor, to power a MicaZ node at 1% duty cycle.We can see that ideally, without leakage the MicaZ node’slifetime would be 65 hours, but because of the leakage, theMicaZ node’s lifetime is actually only 49 hours, or 24% lessthan the lifetime we would otherwise expect.3. OVERVIEW OF SYSTEM DESIGNThe empirical study in Section 2 indicates that <strong>energy</strong>leakage is a critical hurdle that hinders designers exploitingthe benefits of ultra-capacitor over batteries. To address thehurdle, we propose a three-layer design as shown in Figure 7.AdaptationLayerControlLayerHardwareLayerEnvironmentMonitoringDuty CycleControllerEnergyStorageSuggestedDuty CycleEnergyIn<strong>for</strong>mationMilitary...Surveillance<strong>Leakage</strong>LifetimePredictorHarvestingFigure 7: Overview of System Architecture• The hardware layer uses an <strong>energy</strong> harvesting circuit (e.g.,solar panel or wind generator) to harvest the environmental<strong>energy</strong> and uses an ultra-capacitor as the only <strong>energy</strong> storageunit to power <strong>sensor</strong> nodes. This layer also (i) monitors theremaining <strong>energy</strong> inside the ultra-capacitor, (ii) samples the<strong>energy</strong> harvesting rate from the <strong>energy</strong> harvesting circuit,and (iii) models the leakage profile of the capacitor. Thesethree pieces of in<strong>for</strong>mation are then fed into the control layer.321
Working NodeMain Panel & Peripheral CircuitPower Measurement SwitchEnergy Storage (Ultra-capacitor)Smart Power Supply CircuitEnergy FlowCompanion Node (optional)Separate Power SupplyMonitor & Control FlowFigure 8: TwinStar Hardware Architecture• The control layer predicts the lifetime of a node based onthe <strong>energy</strong> harvesting, leakage, and consumption rates. Thedifference between the predicted lifetime and user-specifiedlifetime is used as the control signal to the duty cycle controller,which suggests a certain percentage of duty cyclechange to the application. The control layer deals with twoconditions: <strong>energy</strong> oversupply and undersupply. In the caseof oversupply, the controller prevents the ultra-capacitorfrom charging to its limit, hence reducing the <strong>energy</strong> leakedaway. In the case of undersupply, the controller signals therunning program to reduce the rate of <strong>energy</strong> consumptionso as to ensure the minimal but critical activities of the <strong>sensor</strong>node at any time.• In the adaptation layer, a running application changes itsworking schedules according to the suggested <strong>energy</strong> budget.Adaptation can be archived by changing per-component activitiesin communication and sensing as well as per-flowactivities [15]. We note that designs <strong>for</strong> the adaption layerare highly diverse. Instead of using a case-by-case approach,we propose a generic adaptation technique by treating dutycycleas first-class resource that can be allocated, scheduledand adjusted in Section 7.4. HARDWARE DESIGN OF TWINSTARTwinStar is an add-on power board that harvests <strong>energy</strong>from environments and uses an ultra-capacitor as the only<strong>energy</strong> storage to overcome the intrinsic limitations of batteries(e.g., <strong>energy</strong> uncertainty, limited recharge cycles, lowconversion efficiency, and environment unfriendliness). Thearchitecture of TwinStar is shown in Figure 8. It consistsof (i) the solar panels and peripheral circuit <strong>for</strong> <strong>energy</strong> harvesting;(ii) the power measurement switch; (iii) the ultracapacitor-based<strong>energy</strong> storage; and (iv) the smart powersupply circuit with a DC/DC converter <strong>for</strong> powering theworking node attached to the TwinStar board. The correspondingprinted circuit board is shown in Figure 9. Due tospace constraints, we only explain a few unique features ofthe TwinStar design in the rest of the section.4.1 Smart Power Supply CircuitTo accommodate fluctuating ambient <strong>energy</strong>, the voltageof a power supply shall be stabilized. We apply a highefficiencyswitch-type DC/DC converter <strong>for</strong> providing a stablepower supply <strong>for</strong> the working node. In the battery-basedapproaches, normally a DC/DC converter is powered directlyby a battery, assuming enough <strong>energy</strong> is left in thebattery [15, 16]. However, it would be problematic <strong>for</strong>the ultra-capacitor-based design, especially under extremelylow ambient <strong>energy</strong> situations due to the zero-<strong>energy</strong> bootstrapproblem: Initially, the voltage of the ultra-capacitoris around 0 and all the system components do not workincluding the DC/DC converter. When the voltage of theultra-capacitor reaches a threshold level, the converter entersa warming up stage, during which the high-efficiencySmart PowerSupply CircuitConnector <strong>for</strong>Working NodePowerMeasurementSwitchMain PanelConnectionIsolation Circuit<strong>for</strong> CompanionNodeConnector <strong>for</strong>CompanionNodeUltra-CapacitorConnectionBoot PanelConnectionFigure 9: TwinStar Plat<strong>for</strong>mswitch-type converter needs to excite the external inductorinto oscillations with high transient current (at the level of10mA). If the scavenged <strong>energy</strong> is not sufficient to supportthe converter to finish this stage, the voltage of the ultracapacitordrops below the threshold level and the converterfails to boot up. Such failure repeats itself, wasting <strong>energy</strong>harvested from the environment.To address this zero-<strong>energy</strong> boot-up challenge, a smartcontrol circuit is designed to automatically boot-up and shutdown the DC/DC converter. The basic idea is that duringthe charging state, the DC/DC converter is kept shutdown by the smart control circuit until the ultra-capacitoraccumulates sufficient <strong>energy</strong> and reaches a voltage muchhigher than the DC/DC converter’s input voltage threshold(1.1V); during the discharging period, the DC/DC converteris turned off when the voltage of the ultra-capacitorapproaches the minimum input voltage (0.7V). In this way,high boot-up current stage and <strong>energy</strong> waste can be avoided.However, achieving this kind of smart control needs toovercome a hidden challenge: there is no appropriate powersupply <strong>for</strong> the smart control circuit itself be<strong>for</strong>e enabling theDC/DC converter. In our design, we address all the abovechallenges by proposing a novel dual solar panel solution(a small boot solar panel and a big main panel) togetherwith a Schmitt trigger-based control circuit. The design isillustrated in Figure 10.As shown in Figure 10, a small boot solar panel is appliedto power the Schmitt trigger module that is used to controlthe on/off status of the DC/DC converter. The small panelcharges a small capacitor (C1, which is 47µF) and keeps thevoltage of C1 higher than 2.5V so as to power the Schmitttrigger, which is an extremely low power device with powerconsumption less than 10µW. There<strong>for</strong>e, even with a lowenvironmental <strong>energy</strong> supply, the smart control circuit canstill work.The main panel is the one harvesting <strong>energy</strong> <strong>for</strong> the ultracapacitor.Note that when the DC/DC converter starts towork, its output also feeds back to power the Schmitt trigger,avoiding shutting down the DC/DC converter when thereis no environmental <strong>energy</strong> but the ultra-capacitor is still<strong>energy</strong>-rich.Boot-up & Shutdown CircuitD2D1BootPanelMain Panel&PeripheralCircuit47uFC1PowerSchmittTrigger OutUltracapacitorInC2SHDNDC/DCConverterInOut Power3V SensorNodeFigure 10: Boot-up and Shutdown Control Circuit322
4.2 Ultra-Low-Power Measurement SwitchTo enable the control middle layer to accurately predictthe lifetime of the <strong>sensor</strong> node, the hardware provides powermeasurement capabilities. Keeping in mind that it is importantto make the measurement circuit simple and <strong>energy</strong>efficient, we used P-channel MOSFET as the switches (K 1and K 2 as shown in Figure 11), which are controlled by the<strong>sensor</strong> node.Main Panel&PeripheralCircuitCTL1 (MicaZ)K 1R 1K 2CTL2 (MicaZ)ADC4 ADC6I cap(t)UltracapacitorFigure 11: Power Measurement CircuitNormally the switch K 1 is kept on to harvest environmental<strong>energy</strong>. When measuring the <strong>energy</strong> harvested into theultra-capacitor, K 1 is switched off and K 2 is turned on bythe control signals from the <strong>sensor</strong> node. In our implementation,we use MicaZ node and its ADC4 and ADC6 pinsextract the voltage across the resister R 1. Since the resistanceof the resistor R 1 is known, the current I cap(t) goesthrough R 1 can be calculated.The power consumption of the P-MOSFET switch is extremelylow, at the level of nW, and thus negligible. A verysmall resister R 1 is used <strong>for</strong> the voltage <strong>for</strong>mation and usedonly during the measurement moment (at the level of µs),there<strong>for</strong>e having a negligible effect on the charging efficiency<strong>for</strong> the ultra-capacitor.4.3 External Sensor NodesOur system supports two external <strong>sensor</strong> nodes: (i) aworking node, (ii) an optional companion node. The workingnode is powered solely by the ultra-capacitor. It periodicallysamples the voltage of the ultra-capacitor. Based onthe sampled value it calculates the remaining <strong>energy</strong> insidethe ultra-capacitor. It also periodically controls the powermeasurement switch to measure the environmental powerand calculate the harvested <strong>energy</strong>.In order to analyze the system per<strong>for</strong>mance and supporton-line debugging, the TwinStar plat<strong>for</strong>m also contains theinterface <strong>for</strong> attaching an optional companion node (in Figure9). It is powered and functions separately. Isolation isimportant here because this design prevents the companionnode’s interfering with the working node (in Figure 9).The companion node has three capabilities: (i) periodicallysampling the voltage of the ultra-capacitor, (ii) periodicallymeasuring the <strong>energy</strong> charged into the ultra-capacitor,and (iii) logging data. Since the companion node is poweredby a separate <strong>energy</strong> source, it does not have <strong>energy</strong> constraintduring a short experiment period. The in<strong>for</strong>mationcaptured in the first two functions can either be written intothe companion node’s flash memory or transmitted via radio,supporting either off-line or on-line analysis and debugging.All the measurements conducted by the companionnode is protected by voltage follower circuits to avoid loadeffects and achieve isolation.We note that the working node can run alone without thecompanion node. It only needs to monitor its <strong>energy</strong> statusat a low frequency <strong>for</strong> control purpose. The main purposeof adding the companion node is to accurately monitor oursystem’s per<strong>for</strong>mance at a high frequency <strong>for</strong> evaluation purpose.By using a companion node, the observer affect canbe avoided, otherwise the working node has to monitor andrecord <strong>energy</strong> status by itself. These operations consume alot of <strong>energy</strong> that is not part of workload, causing inaccuracyin per<strong>for</strong>mance evaluation.4.4 Summary of Hardware DesignThe TwinStar node has a battery-free hardware structureusing a combination of an ultra-capacitor and solar panels.It has several features that match our requirements:• Stability: To the best of our knowledge, it is the firstdesign that considers the zero-<strong>energy</strong> boot up challenge anduses a dual-panel structure comprising a boot panel and aharvesting panel. The boot panel ensures stable power harvestingunder extremely low ambient <strong>energy</strong> situations. Theharvesting panel is used as the main charging device <strong>for</strong> theultra-capacitor. DC/DC converter provides stable output topower the working node.• Visibility: As an experimental plat<strong>for</strong>m, the TwinStarnode provides monitoring/debug interfaces <strong>for</strong> attaching anadditional companion node (as shown in Figure 9), whichcan help us understand the behaviors of the running workingnode and facilitate system debugging and per<strong>for</strong>manceevaluation. The separate power supply <strong>for</strong> the companionnode ensures accurate characterizing of the <strong>energy</strong> profile ofthe working node. In the commercial release version, thiscompanion node can be easily removed to reduce cost.5. SYSTEM ENERGY MODELINGSystem modeling is an essential step <strong>for</strong> effective control.In this section, we introduce three models: the <strong>energy</strong> harvestingmodel (Section 5.1), the <strong>energy</strong> consumption model(Section 5.2) and the <strong>energy</strong> leakage model (Section 5.3).To achieve effective <strong>energy</strong> <strong>synchronization</strong>, we need to balancethe interaction among these models into an equilibriumstate.5.1 Energy Harvesting ModelThe <strong>energy</strong> harvesting model is built online using the measurementswitch discussed in Section 4.2. The total <strong>energy</strong>E E harvested during the time interval [(k − 1)T, kT] is:∆E E[kT] =Z kT(k−1)TI cap(t) · V cap(t)dt (1)Here V cap(t) is the ultra-capacitor’s voltage at time t.Both I cap(t) and V cap(t) can be measured by the ultra-lowpowermeasurement switch shown in Figure 11. T is calledthe sampling period and k is called the sampling instant.5.2 Energy Consumption ModelThe <strong>energy</strong> consumption of the <strong>sensor</strong> node is determinedby three parameters: average active mode current I active,average sleep mode current I sleep and duty cycle D (thepercentage of active time). The <strong>energy</strong> consumption duringthe time interval [(k − 1)T, kT] can be represented as:∆E C[kT] = V node · (I active · D + I sleep · (1 − D)) · T (2)The average power consumption at the end of time kTcan be represented as follows:P CAV G(kT) = ∆EC[kT] (3)T5.3 Energy <strong>Leakage</strong> ModelBased on our empirical study in Section 2, we <strong>for</strong>mulatea leakage model to characterize the relationship betweenthe remaining <strong>energy</strong> in the ultra-capacitor and the leakagepower. To minimize the environmental effect, such as323
Adaptation LayerAdaptive Componentsn thpredictionT targetT targetControl LayerT diffDuty CycleControllerD suggestE cLifetimePredictorT expect2 nd prediction1 st predictionExpected lifetime… .. ….. ….SurplusT expectExpected lifetime DeficitHardware LayerEnergy Storage<strong>Leakage</strong>HarvestingExpected lifetimeDeficitTime LineFigure 13: Control Layer Design Overviewtemperature, the leakage model is normally obtained off-lineand can be adjusted online after deployment.To conduct off-line modeling, the harvesting circuit is shutdown and the node executes a testing program at a constantduty cycle. At the end of every T seconds, the control layerperiodically monitors the remaining voltage V cap(t) of theultra-capacitor. There<strong>for</strong>e, the difference of remaining <strong>energy</strong>∆E R[kT] during the time interval [(k −1)T, kT] can becalculated as:∆E R[kT] = C `Vcap((k − 1)T) 2 − V 2´cap(kT)2= E R ((k − 1)T) − E R(kT) (4)Without <strong>energy</strong> harvesting, ∆E R[kT] is the sum of the<strong>energy</strong> consumed by the node and <strong>energy</strong> leaked away duringtime interval [(k − 1)T, kT], namely∆E R[kT] = ∆E C[kT] +Z kT(k−1)TP L(t)dtFor small value of T, the above equation can be simplifiedas:∆E R[kT] = ∆E C[kT] + P L(kT) · T (5)By combining Equations (4) and (5), at the end of anygiven time kT, the leakage power P L can be calculated bythe <strong>sensor</strong> node as follows:ER((k − 1)T) − ER(kT) − ∆EC[kT]P L(kT) = (6)TThe <strong>sensor</strong> node builds the leakage model by storing thevalue of P L(kT) and the corresponding E R(kT) value in itsmemory. Figure 12(a) shows the empirical leakage data ofthe leakage model <strong>for</strong> diverse capacitors. To express themodel mathematically and reduce the storage space <strong>for</strong> the<strong>Leakage</strong> Power (mW)<strong>Leakage</strong> Power (mW)1098765432110987654321400400300 200 100Remaining Energy (J)22F33F50F100F(a) Empirical <strong>Leakage</strong> Pattern300 200 100Remaining Energy (J)RealModel(b) <strong>Leakage</strong> Model FittingFigure 12: <strong>Leakage</strong> Model00Figure 14: Sustainabilitymodel, we use a piecewise linear approximation of the leakagecurve. We define turning points as the points in thecurve with considerable slope change, which are used to decidethe start and end points of line segments. There<strong>for</strong>e,the whole leakage model can be represented by a set of linearfunctions, as shown in Eqn.(7).8a 1 · E R + b 1; E R1 ≤ E R < E R2>< a 2 · E R + b 2; E R2 ≤ E R < E R3P L(E R) =(7). ;.>:a n · E R + b n; E Rn ≤ E R ≤ E Rn+1Here E R1 , E R2 ,· · ·, E Rn+1 are the remaining <strong>energy</strong> valuescorresponding to the turning points of the segments. a 1,a 2,· · ·, a n and b 1, b 2,· · · , b n are the coefficients <strong>for</strong> eachline segment. Figure 12(b) shows an example <strong>for</strong> the linesegment-basedmodeling of the leakage power. The squaredots represent the turning points. The model we built accuratelymatches the empirical results.6. CONTROL LAYER DESIGNThe design objective of the control layer is to consumeas much <strong>energy</strong> as possible while maintaining sustainability.Sustainability T target is defined as the duration a node mustsurvive without ambient <strong>energy</strong>. T target is a configurable parameter,set by users according to the environment in which<strong>sensor</strong>s are deployed. For example, in <strong>energy</strong>-rich environmentssuch as deserts, users can set a smaller T target to consume<strong>energy</strong> aggressively. On the other hand, in <strong>energy</strong>-poorand unpredictable environments, a larger T target is desiredto ensure the aliveness of <strong>sensor</strong> nodes. Once T target is chosen,it is used as the set point in the feedback control baseddesign as shown in Figure 13.As shown in Figure 14, to maintain sustainability, thelifetime predictor periodically predicts the expected lifetimebT expect and compares b T expect with the target lifetime T target.In the case of <strong>energy</strong> deficit (i.e., b T expect < T target), a nodeis expected to run out of <strong>energy</strong> after b T expect seconds, if itmaintains current level of activity. In the case of <strong>energy</strong>surplus (i.e., b T expect > T target), a node can increase the activityaccordingly <strong>for</strong> application per<strong>for</strong>mance improvement.As shown in Figure 13, the change of activity is achieved byusing the difference between b T expect and T target as the inputto the duty cycle controller, which suggests a certain percentageof duty cycle change to the adaptation layer. Unlikeconventional control designs, the duty cycle is suggestedby the control layer to the adaptation layer. The adaptationlayer adjusts the duty cycle based on the application’srequirement. This allows a more flexible design of the <strong>energy</strong>adaptation layer. The rationale behind this is that theshort-term duty cycle available might not always be synchronizedwith the activity demanded by the applications.324
For example, a node should not stop sending critical controlmessages disruptively simply because the control layersuggests to reduce duty cycle due to the brief drop in <strong>energy</strong>supply. Short-term mismatching is tolerable becausethe <strong>energy</strong> storage unit (e.g., ultra-capacitor) can serve as abuffer.The control layer contains two major components: thelifetime predictor and the duty cycle controller, as shown inFigure 13. These are described in the following subsections.6.1 Design of the Lifetime PredictorTo ensure that <strong>sensor</strong> nodes can survive dark periods duringwhich no ambient <strong>energy</strong> is available (e.g., night), it isessential to predict lifetime conservatively based on (i) theremaining <strong>energy</strong>, (ii) the <strong>energy</strong> leakage rate, and (iii) the<strong>energy</strong> consumption rate. Since the available environmental<strong>energy</strong> changes dynamically, when do prediction, we conservativelyassume zero <strong>energy</strong> from the environment in thefuture (note: current <strong>energy</strong> harvested can be measured andthere<strong>for</strong>e is not assumed to be zero).As discussed in Section 5.3, the leakage power changesalong with the voltage of an ultra-capacitor. The higher thevoltage, the larger leakage power an ultra-capacitor suffers.To precisely estimate the expected lifetime b T expect, we needto iteratively estimate the amount of <strong>energy</strong> leaked away.As shown in Figure 15, a prediction is conducted at timet 0. The predictor initializes b T expect = 0, then goes throughan iterative process. During each iteration, the predictorextends the value of the expected lifetime b T expect by ∆T andpredicts how much <strong>energy</strong> will be consumed during the ∆Tperiod. The iterative prediction stops, when the expectedremaining <strong>energy</strong> is below the minimum <strong>energy</strong> required tokeep the <strong>sensor</strong> node alive. Suppose the number of totaliterations is N, the expected lifetime b T expect = N∆T. Morespecifically, the prediction goes through the following steps.Step 1: Measure Remaining EnergyAt the time t 0, the remaining <strong>energy</strong> b E R(t 0) can be obtainedby sampling the voltage V cap of the ultra-capacitor:bE R(t 0) = 1 2 CV 2cap when n = 0 (8)Step 2: Predict the <strong>Leakage</strong> Power at Time t 0+n∆TBased on the leakage model specified in Eqn. 7, the predictedleakage power at time t 0 + n∆T is estimated as:bP L(t 0 + n∆T) = a i · bE R(t 0 + n∆T) + b iwhere E Ri ≤ b E R(t 0 + n∆T) < E Ri+1 , n ≥ 0Where ∆T is the time step used by the predictor to conductthe prediction operation.Step 3: Predict Remaining Energy at t 0 + (n + 1)∆TAssuming no environmental <strong>energy</strong>, the predicted remaining<strong>energy</strong> at time t 0 + (n + 1)∆T is:bE R(t 0 + (n + 1)∆T) =bE R(t 0 + n∆T) − R “t 0 +(n+1)∆Tt 0P+n∆T C(t) + P b ”L(t) dtFor simplicity, the above prediction is approximated as:bE R(t 0 + (n + 1)∆T) “ ≈bE R(t 0 + n∆T) − P C(t 0 + n∆T) + P b ”L(t 0 + n∆T) ∆T(9)(10)(11)Expected Remaining EnergyE REmint0ER(t0)t0+ TER( t0+ T)ER( t0+ 2 T)ER( t0+ n T)t0+ 2 Tt0+ n TExpected LifetimeFigure 15: Iterative PredictionTexpectStep 4: Test and JumpAs shown in Figure 15, the prediction process is iterative,in which the remaining <strong>energy</strong> b E R(t 0 + (n + 1)∆T) ispredicted based on the prediction result of b E R(t 0 + n∆T).The predicted lifetime of a node ends when there is no sufficient<strong>energy</strong> to sustain its basic operations. Namely, ifbE R(t 0 + (n + 1)∆T) < E min, the lifetime predictor returnsn∆T as the expected lifetime b T expect of the node. Otherwise,n = n + 1 and the lifetime predictor goes back to Step2.We note the prediction result is affected by power consumptionpattern P C(t). With a constant <strong>energy</strong> consumptionrate (i.e., P C(t) = c), more <strong>energy</strong> is leaked during thehigh voltage stage. For a leakage-<strong>aware</strong> design, it is necessaryto adjust the power consumption pattern P C(t) basedon the value of the leakage power P L(t). In general, we shallincrease power consumption when the P L(t) value is highand reduce power consumption when the P L(t) value is low.This type of adjustment is achieved in the controller designintroduced in the following sections.6.2 Reducing Prediction OverheadOur prediction is based on the approximations that thepredicted leakage power value b P L(t) does not change duringtwo consecutive iterations. In order to increase the accuracyof prediction, a smaller ∆T value is desired. However,a smaller ∆T value leads to more iterations, resulting inmore <strong>energy</strong> consumption in computation. Clearly, it is difficultto reconcile the conflict between prediction accuracyand computation overhead with a single ∆T value. It shouldbe noted that the leakage power value changes quickly whenvoltage is high but changes slowly when voltage is low, asshown earlier in Figure 12(a). There<strong>for</strong>e, the predictionof the lifetime can be scheduled along the predicted timelinewith increasing ∆T values (decreasing frequency). Thisadaptive prediction allows the node to estimate accurately inhigh leakage power stage and efficiently in low leakage powerstage. In our implementation, using adaptive prediction, themaximum number of iterations needed is 305. Compared tothe approach using a single small ∆T value, which needs10,389 iterations, our adaptive predictor can reduce 10084extra iterations, while maintaining a 99% accuracy.6.3 Design of the Duty-Cycle ControllerIn this section, we describe the design of the controller inthe system. The controller indicates the suggested change ofduty cycle ∆D suggest to the adaptation layer based on theremaining <strong>energy</strong> inside the ultra-capacitor and the time differenceT diff = b T expect −T target. Here we use a P-controller,considering the fact that the bigger the difference T diff , thelarger ∆D is needed to adjust.t325
The major issue <strong>for</strong> the P-controller design is to choosean appropriate control gain P, so that the <strong>sensor</strong> node canreduce the amount of <strong>energy</strong> leaked away and still meetthe lifetime goal of T target. Intuitively, if the <strong>sensor</strong> nodeincreases its duty cycle at the ultra-capacitor’s high leakagepower stage, it can capture <strong>energy</strong> that would otherwiseleaked away. To illustrate the design, consider two scenarios:Energy Surplus: In the case of an <strong>energy</strong> surplus, b T expectis larger than T target, we get a positive T diff value. To convergeb T expect to the set point T target, a positive duty-cyclechange that can increase the power consumption P C(t) needsto be suggested to the adaption layer. Clearly, it is desirableto increase more duty-cycle when the leakage power valueP L(t) is high. There<strong>for</strong>e, in the case of an <strong>energy</strong> surplus,we used the following adaptive P-controller:∆D suggest = G + · P L · T diff (12)where G + is a coefficient <strong>for</strong> control gain adjustment in thecase of an <strong>energy</strong> surplus.Energy Deficit: In the case of an <strong>energy</strong> deficit, b Texpectis smaller than T target, and we get a negative T diff value.To converge b T expect to the set point T target, we shall reducethe power consumption P C(t) by suggesting a negative dutycycle change to the adaption layer. It is desirable to keepa high duty cycle when the leakage power P L(t) is high.There<strong>for</strong>e, in the case of an <strong>energy</strong> deficit, we would liketo reduce the duty cycle slowly in the ultra-capacitor’s highleakage power stage. The following adaptive P-controller isused:∆D suggest = G−P L· T diff (13)where G − is a coefficient <strong>for</strong> control gain adjustment inthe case of an <strong>energy</strong> deficit.Current (mA)98765432100 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60Time (mS)Figure 16: Control Layer Current Draw6.4 Computation OverheadThe duty-cycle control is an online process, hence its overheadshould be carefully considered. Clearly, the overhead ofthe control layer is determined by the overhead of each controloperation and the frequency of control. In each controloperation, a node needs to predict the lifetime and use thedifference between the expected lifetime and targeted lifetimeto control the duty cycle change. The active durationof each control operation is very small. For instance, Figure16 shows the profile of current draw measured with anoscilloscope. Each control operation draws approximately7.2mA <strong>for</strong> about 4ms, which can be translated into 86.4µJper control operation. The frequency of control operationin our design is at the order of minutes (e.g., 5 minutes bydefault). Compared to the typical <strong>energy</strong> consumption ofa <strong>sensor</strong> device (e.g., MicaZ), <strong>energy</strong> consumption of thecontrol layer adds only 0.0013% overhead to the system.7. ADAPTATION LAYER DESIGNThe high-level goal of the adaptation layer is to optimizethe system per<strong>for</strong>mance by adjusting the system activities,such as sensing and communication, based on the application’srequirement and the suggested duty-cycle from thecontrol layer. Specifically, let the active instance of a <strong>sensor</strong>node be a tuple (t, d), where t is the start time of the activeinstance and d is the corresponding duration of this activeinstance, the working schedule of a node can be representedas Γ = {(t 1, d 1),(t 2, d 2), ...}. Essentially, Γ stores all activeinstances <strong>for</strong> a node. With the suggested duty-cycle from thecontrol layer, a node can increase or decrease its duty cycleby either increasing/reducing the number of active instancesor extending/shrinking the active duration. For <strong>sensor</strong> activitiessuch as sensing or communication, such increase ordecrease of duty cycle at a single node could significantlyimpact the whole system per<strong>for</strong>mance. To optimize the systemper<strong>for</strong>mance and make the best use of available <strong>energy</strong>,the adaptation layer conducts two types of <strong>energy</strong> <strong>synchronization</strong>operations: (i) local <strong>energy</strong> <strong>synchronization</strong> and (ii)global <strong>energy</strong> <strong>synchronization</strong>.Duty-cycle-based adaption is generic enough to be appliedin many protocols. Due to space constraints, in the rest ofthis section, we can only present an exemplary adaptationlayer design <strong>for</strong> the event detection application as a casestudy to demonstrate how the <strong>energy</strong> <strong>synchronization</strong> operationsare conducted. Other designs can be accommodatedin the future. For most of the sensing applications, the workingschedules of <strong>sensor</strong> nodes are periodic. For example, aperiodic working schedule {(1, 3),(101, 3), (201, 3), ...} representsthe <strong>sensor</strong> node is active <strong>for</strong> 3 active durations every100 units of time, The duty cycle of a <strong>sensor</strong> node, there<strong>for</strong>e,is the ratio between the total number of active durationswithin a period and the time duration of the period. In theabove example, the duty cycle is 3%.7.1 Local Energy SynchronizationIn local <strong>energy</strong> <strong>synchronization</strong>, an individual <strong>sensor</strong> nodeadjusts its own duty cycle based on the suggestion from thecontrol layer. For the event detection application, an individual<strong>sensor</strong> node’s active instances should be evenly scatteredwithin a period to minimize the expected detectiondelay of a target within its sensing range. For example, assumethe initial duty cycle is 1% and the duration of a periodis 100 units of time, the adaptation layer can set the workingschedule to be Γ = {(0, 1),(100, 1), ...}. The expected detectiondelay is 100 = 50. When the control layer suggests2to change the duty cycle to 2%, to minimize the expecteddetection delay, the adaptation layer can set the workingschedule to be Γ = {(0, 1),(50, 1), ...}. The expected detectiondelay is reduced to 50 2= 25. In this example, we cansee that the adaptation layer’s local <strong>energy</strong> <strong>synchronization</strong>is important. By doing local <strong>energy</strong> <strong>synchronization</strong>, the<strong>sensor</strong> node makes best use of available <strong>energy</strong> and reducesthe expected detection delay from 50 to 25.7.2 Global Energy SynchronizationIn global <strong>energy</strong> <strong>synchronization</strong>, multiple <strong>sensor</strong> nodesinside the network cooperatively adjust their duty cycles tooptimize the system per<strong>for</strong>mance. In many applications,multiple <strong>sensor</strong>s are deployed to monitor the same region toenhance detection fidelity. Under such scenarios, those <strong>sensor</strong>nodes should coordinate their working schedules witheach others’ available duty cycle budget. Specifically, thenodes that monitor the same region can divide the wholeperiod into several sections. The number of sections is equalto the number of these nodes. Each node only increasesor decreases the number of active instances within its own326
sections. In this way, no <strong>energy</strong> is wasted <strong>for</strong> the nodesto exchange in<strong>for</strong>mation to coordinate their schedules andavoid being active at the same time. For example, assumingnodes a and b are deployed to monitor a region and the initialduty cycle <strong>for</strong> node a and node b is 1% each. As shownin Figure 17(a), the initial working schedule <strong>for</strong> node a andb is Γ a = {(0, 1),(100, 1), ...} and Γ b = {(50, 1), (150, 1), ...},respectively. The expected detection delay in the commonsensing region of node a and b is 50 = 25. When the controllayer suggests node a to increase the duty cycle to 2%,2without global <strong>energy</strong> <strong>synchronization</strong>, to minimize the detectiondelay the adaptation layer will add active instancesin the middle of node a’s initial active instances, as shownin Figure 17(b). These newly added active instances overlapwith node b’s initial active instances. There<strong>for</strong>e, theexpected detection delay in the common sensing region ofnode a and b remains the same. However, with global <strong>energy</strong><strong>synchronization</strong>, node a’s adaptation layer will evenlydistribute the active instances within node a’s sections (i.g.,from 0 to 49), as shown in Figure 17(c). In this way, theexpected detection delay in the overlapping region of nodea and b reduces from 25 to 18.75.Node aNode bNode aNode bNode aNode b0 50100SleepSleepSleepOverlapSleep0 50100SleepSleep0 50100(b) without Global Energy SynchronizationSleepActiveSleep0 50100(a) Initial 1% Duty CycleSleep0 25 50100SleepSleep0 50100(c) with Global Energy SynchronizationFigure 17: Global Energy Synchronization ExampleThe above example shows that in addition to local <strong>energy</strong><strong>synchronization</strong>, global <strong>energy</strong> <strong>synchronization</strong> is important<strong>for</strong> the adaptation layer to efficiently utilize the available<strong>energy</strong> suggested from the control layer and optimize thenetwork level system per<strong>for</strong>mance as a whole.8. EVALUATION I:LOCAL ENERGY SYNCHRONIZATIONIn this section, we evaluate system per<strong>for</strong>mance of a singleTwinStar node under different types of environmental<strong>energy</strong> patterns. Since this work is the first one investigatingleakage-<strong>aware</strong> control, the state-of-art (e.g, <strong>energy</strong> harvestingand conservation) is complementary, however, providesno appropriate baselines <strong>for</strong> comparison. There<strong>for</strong>e, wecompare our system working in <strong>Leakage</strong>-Aware (LA) modewith the same system but in a Non-<strong>Leakage</strong>-Aware (NLA)mode. The NLA mode has no in<strong>for</strong>mation on the leakagerate of the ultra-capacitor. In other words, the system inthe non-leakage-<strong>aware</strong> mode predicts the expected lifetimeand controls the duty cycle of the working node, based onthe current <strong>energy</strong> consumption and remaining <strong>energy</strong> insidethe ultra-capacitor. Without considering the leakage profile,the feedback controller in the non-leakage mode uses a fixedP-controller <strong>for</strong> both the <strong>energy</strong> surplus and <strong>energy</strong> deficitscenarios.We also compare the LA and NLA systems with an oraclesystem that assumes the knowledge of all the available environmental<strong>energy</strong> in the future. The oracle system runs offline,based on the empirical environmental <strong>energy</strong> collectedunder three different scenarios (described in Section 8.3).8.1 Evaluation Metrics and BaselineThe key advantage of the leakage-<strong>aware</strong> design is efficientlyusing <strong>energy</strong> that would possibly leak away. We usetwo metrics to evaluate the per<strong>for</strong>mance of our system, (i)Cumulated Active Time (CAT): the cumulated activetime of a <strong>sensor</strong> node. Under a given <strong>energy</strong> harvestingpattern, the larger the CAT value, the more work a <strong>sensor</strong>node can per<strong>for</strong>m. (ii) <strong>Leakage</strong> to Consumption Ratio(LCR): the ratio between leakage power value and powerconsumption value at any given time. The smaller the LCRvalue, the less <strong>energy</strong> leaked away.8.2 ImplementationWe designed and implemented the adaptation layer andthe control layer using TinyOS and NesC. The compiledimage of a full MicaZ node implementation occupies 17,894bytes of code memory and 368 bytes of data memory.As shown in Figure 8 in Section 3, our hardware containsa custom circuit board to harvest the <strong>energy</strong> and two off-theshelf<strong>sensor</strong> nodes (e.g., MicaZ nodes): (i) a working node,which is powered by the ultra-capacitor, and (ii) a companionnode, which is powered by batteries. The companionnode periodically wakes up to measure the <strong>energy</strong> harvestingrate and the remaining voltage inside the ultra-capacitor<strong>for</strong> evaluation purpose. Measurements are logged into theflash and are used to conduct off-line analysis of system per<strong>for</strong>mance.We note that the companion node has a separatepower supply and acts as the observer <strong>for</strong> our system. Theworking node is the node that actually runs our system. Italso periodically wakes up to sample the remaining voltageof the ultra-capacitor <strong>for</strong> the purpose of feedback control.The predictor and controller are invoked periodically andget the suggested duty cycle ∆D. The adaption layer adjuststhe node’s duty cycle based on the suggested ∆D byextending the length of active instances.8.3 Different Deployment ScenariosWe ran our system under three different scenarios: outdoor,indoor, and mobile backpack, as shown in Figures18, 19 and 20, respectively. These scenarios are carefullyselected to represent a wide range of <strong>energy</strong> harvestingpatterns: (i) periodical and vibrated <strong>energy</strong> <strong>for</strong> the outdoorenvironment, (ii) periodical and constant <strong>energy</strong> <strong>for</strong>the indoor environment, and (iii) dynamic and highly unpredictable<strong>energy</strong> in the mobile environment. For eachscenario, we used two sets of hardware, one running inthe leakage-<strong>aware</strong> mode, the other in the non-leakage-<strong>aware</strong>mode. We put these two sets of hardware near each other sothat they harvested a similar amount of environmental <strong>energy</strong>.The working node woke up every 5 minutes in all threescenarios. The companion node woke up every 15 seconds<strong>for</strong> the outdoor and indoor experiments. For the backpackexperiment, since the environmental <strong>energy</strong> changed veryfrequently, the companion node woke up every 1 second. Inall the scenarios, the MicaZ nodes were initially working ata 1% duty cycle.327
OutdoorIndoorMobile BackpackHarvested Power (mW)180150120906030(a) Experimental Site00 10 20 30 40 50 60 70 80Time (Hour)2.6(b) Harvested PowerHarvested Power (mW)180150120906030(a) Experimental Site00 10 20 30 40 50 60 70 80Time (Hour)2.6(b) Harvested PowerHarvested Power (mW)180150120906030(a) Experimental Site00 10 20 30 40 50 60 70 80Time (Hour)2.6(b) Harvested PowerCapacitor Voltage (V)2.21.81.41 LANLA0.60 10 20 30 40 50 60 70 80Time (Hour)(c) Capacitor VoltageCapacitor Voltage (V)2.21.81.41 LANLA0.60 10 20 30 40 50 60 70 80Time (Hour)(c) Capacitor VoltageCapacitor Voltage (V)2.21.81.41 LANLA0.60 10 20 30 40 50 60 70 80Time (Hour)(c) Capacitor VoltageCumulated Active Time (Hour)4321OracleLANLA00 10 20 30 40 50 60 70 80Time (Hour)(d) Cumulated Active TimeCumulated Active Time (Hour)4321OracleLANLA00 10 20 30 40 50 60 70 80Time (Hour)(d) Cumulated Active TimeCumulated Active Time (Hour)4321OracleLANLA00 10 20 30 40 50 60 70 80Time (Hour)(d) Cumulated Active Time<strong>Leakage</strong> to Consumption Ratio0.60.50.40.30.20.1NLALAOracle00 10 20 30 40 50 60 70 80Time (Hour)(e) <strong>Leakage</strong> to Consumption RatioFigure 18: Outdoor<strong>Leakage</strong> to Consumption Ratio0.60.50.40.30.20.1NLALAOracle00 10 20 30 40 50 60 70 80Time (Hour)(e) <strong>Leakage</strong> to Consumption RatioFigure 19: Indoor<strong>Leakage</strong> to Consumption Ratio0.60.50.40.30.20.1NLALAOracle00 10 20 30 40 50 60 70 80Time (Hour)(e) <strong>Leakage</strong> to Consumption RatioFigure 20: Mobile Backpack328
8.4 Outdoor ExperimentThe outdoor scenario represents such potential applicationsas environment monitoring [22] and scientific exploration[9]. In the outdoor experiment, we deployed oursystem outside of a fifth-floor apartment, as shown in Figure18(a). We put TwinStar nodes outside the window, facingsouth. The total time duration of this experiment was76 hours.Figure 18(b) shows the <strong>energy</strong> harvested by the systemin the leakage-<strong>aware</strong> and non-leakage-<strong>aware</strong> modes over the76 hours. We placed two systems close to each other toharvest similar amounts of <strong>energy</strong> from the environment.By inspecting Figure 18(c) closely, one can discover thatthe leakage-<strong>aware</strong> system consumes <strong>energy</strong> quickly when thevoltage is high (i.e., leakage is high) and it slows down theconsumption when the voltage is low.This reduces theamount of <strong>energy</strong> leaked away. As a result, at the end ofthe experiment, the capacitor’s voltage <strong>for</strong> the leakage-<strong>aware</strong>system was 1.14V, higher than the capacitor’s voltage <strong>for</strong> thenon-leakage-<strong>aware</strong> system, which was 1.09V.Figure 18(d) compares the cumulated active time amongthe leakage-<strong>aware</strong>, non-leakage-<strong>aware</strong>, and oracle systems.Clearly, the leakage-<strong>aware</strong> system allows nodes to consumemore <strong>energy</strong> over time than the non-leakage-<strong>aware</strong> system.Since the oracle system have the knowledge of the availableenvironmental <strong>energy</strong> in the future, it can more aggressivelyconsume <strong>energy</strong> to reduce the <strong>energy</strong> leaked away. However,the curves of leakage-<strong>aware</strong> and oracle systems are veryclose to each other. Moreover, it’s very difficult to predictthe available environmental <strong>energy</strong> in the future. For example,in Figure 18(b), the available environmental <strong>energy</strong> onthe third day is 5 − 6 times less than on the previous twodays. By inspecting Figure 18(d) carefully, one can observethat the leakage-<strong>aware</strong> system exhibits a certain stair effect.This is because of the changing duty cycles of the adaptionlayer according to the <strong>energy</strong> harvesting pattern, as shownin Figure 18(b). Obviously, the leakage-<strong>aware</strong> system is veryeffective. For example, after 70 hours, the leakage-<strong>aware</strong> systemallowed a node to stay active 70% longer than did thenon-leakage-<strong>aware</strong> system.Figure 18(e) shows the <strong>Leakage</strong> to Consumption Ratio(LCR) values of the systems running in the oracle, leakage<strong>aware</strong>,and non-leakage-<strong>aware</strong> modes over the 76 hours. Byincreasing the <strong>energy</strong> consumption at the high leakage powerstage and reducing the <strong>energy</strong> consumption at the low leakagepower stage, the oracle and leakage-<strong>aware</strong> systems alwaysmaintain the LCR value at very low level. The LCRvalue of the non-leakage <strong>aware</strong> system is more than twicelarger than that of the leakage <strong>aware</strong> system.8.5 Indoor ExperimentThe indoor scenario represents such potential applicationsas facility management, structure monitoring. As shown inFigure 19(a), our system was deployed under the overheadlight in our lab. The total time duration <strong>for</strong> this experimentwas 72 hours. The light was turned on in the morning, whenpeople came to the lab, and turned off in the middle of theday or during the night when no one was inside the lab.Figure 19(b) shows the <strong>energy</strong> harvested by the systemsworking in leakage-<strong>aware</strong> and non-leakage-<strong>aware</strong> modes overthe 72-hour period. The fluctuation of the <strong>energy</strong> level wasdue to the turned on or off of the neighboring overheadlights. These two systems harvested similar amounts of <strong>energy</strong>from the environment, but they had different amountsof cumulated active time, as shown in Figure 19(d). The cumulatedactive time <strong>for</strong> both leakage-<strong>aware</strong> and non-leakage<strong>aware</strong>systems in the indoor scenario was smaller than thatof the outdoor scenario because in the indoor scenario, thetotal available <strong>energy</strong> was smaller. For the same reason,the gap of cumulated active time between the leakage-<strong>aware</strong>system and oracle system was smaller than that of the outdoorscenario. Figure 19(e) shows again that compared withthe non-leakage <strong>aware</strong> system, the leakage <strong>aware</strong> system hasmuch smaller value of LCR during the high leakage powerstage than the non-leakage-<strong>aware</strong> system.8.6 Mobile Backpack ExperimentWe also deployed our system on a backpack, as shown inFigure 20(a). It was carried by a graduate student every day<strong>for</strong> 3 days. During the night and in the early morning, thebackpack was placed near a living room window to harvestenvironmental <strong>energy</strong> through the window. During the day,the graduate student carried it to attend outdoor and indooractivities. This scenario represents such potential applicationsas assisted living and human-centric sensing [8]. Thetotal time duration of this experiment was 76 hours.Figure 20(b) shows the <strong>energy</strong> harvested by the systemsworking in the leakage-<strong>aware</strong> and non-leakage-<strong>aware</strong> modesover the 76 hours. Compared with the outdoor and indoorcases, the <strong>energy</strong> harvested in the backpack experiments wasvery bursty, with the high peak corresponding to outdooractivity and the flat part corresponding to indoor activity.Figure 20(c) shows the capacitor’s voltage measured overtime. Clearly, the leakage-<strong>aware</strong> system was more responsiveto the change in the <strong>energy</strong> harvesting rate, increasingduty cycle rapidly in the presence of bursty influxes of <strong>energy</strong>.There<strong>for</strong>e the leakage-<strong>aware</strong> system stayed at highvoltage values <strong>for</strong> a smaller amount of time, hence sufferingless <strong>energy</strong> leakage. At the end of the experiment, thevoltage of the capacitor <strong>for</strong> the leakage-<strong>aware</strong> system was0.19V higher than that of the non-leakage-<strong>aware</strong> system.Figure 20(d) shows again that the leakage-<strong>aware</strong> system enjoysmuch more cumulated active time than the non-leakage<strong>aware</strong>system. Figure 20(e) confirms the above results.8.7 SummaryWe have evaluated our system under different environmental<strong>energy</strong> patterns. In all these scenarios, our leakage-<strong>aware</strong>system outper<strong>for</strong>ms the non-leakage-<strong>aware</strong> system. The keyobservations are: (i) the working node never runs out ofpower (note: minimum voltage to maintain liveness is 0.7V);(ii) the leakage-<strong>aware</strong> design is more responsive to the influxof <strong>energy</strong>, increasing duty cycle quickly; and (ii) the leakage<strong>aware</strong>system maintains a high duty cycle when the voltageis high and a low duty cycle when the voltage is low. Thistype of control effectively reduces the amount of leakage.9. EVALUATION II:GLOBAL ENERGY SYNCHRONIZATIONIn this section, we evaluate the system per<strong>for</strong>mance of anetwork of TwinStar nodes under the global <strong>energy</strong> <strong>synchronization</strong>scheme. The event detection application is run ontop of the adaptation layer.9.1 Evaluation MetricsIn event detection application, the detection delay is avery important metric to evaluate system per<strong>for</strong>mance. Forthe events such as fire, a shorter detection delay significantlyreduces the amount of damage. The metrics used to evalu-329
(a) MorningHarvested Power (mW)Harvested Power (mW)1801206000 24 48Time (Hour)18012060(a) Node 100 24 48Time (Hour)(e) Node 5Harvested Power (mW)Harvested Power (mW)1801206000 24 48Time (Hour)18012060(b) Node 200 24 48Time (Hour)(f) Node 6Harvested Power (mW)Harvested Power (mW)1801206000 24 48Time (Hour)18012060(c) Node 300 24 48Time (Hour)(g) Node 7Harvested Power (mW)Harvested Power (mW)1801206000 24 48Time (Hour)18012060(d) Node 400 24 48Time (Hour)(h) Node 8(b) AfternoonFigure 21: Experiment SitesHarvested Power (mW)1801206000 24 48Time (Hour)ate the per<strong>for</strong>mance of our system is the Average DetectionDelay: the summation of the detection delay of all theevents divided by the total number of detected events.9.2 ImplementationWe deployed 12 TwinStar nodes in a 12 meters by 11meters wooded area (shown in Figure 21) to continuouslycollect solar <strong>energy</strong> (shown in Figure 22) <strong>for</strong> two days. Thecollected <strong>energy</strong> pattern is used to power 12 TwinStar nodesto work under 3 different modes: <strong>Leakage</strong>-Aware (LA), Non-<strong>Leakage</strong>-Aware (NLA), and oracle, with 48 hours per mode.The sensing irregularity model [14] is used. During the 48hours’ experiment, 500 events are randomly emulated withinthe 12m × 11m area.9.3 Distribution of EnergyFigure 23 shows the <strong>energy</strong> distribution among these 12nodes, after they run <strong>for</strong> 48 hours in the LA, NLA, and oraclemodes, respectively. Figure 23(a) shows that when the nodeswork in NLA mode, regardless of available environmental<strong>energy</strong>, all the nodes consume similar amount of <strong>energy</strong>. Theextra harvested environmental <strong>energy</strong> is leaked away. Asshown in Figure 23(b), when the nodes work in LA mode,the <strong>energy</strong> they consumed is synchronized with the amountof <strong>energy</strong> they harvested from the environment. The more<strong>energy</strong> they harvested, the more <strong>energy</strong> they consumed. Bycomparing Figure 23(b) with Figure 23(c), the nodes workin LA mode and oracle mode have similar per<strong>for</strong>mance.9.4 Impact of Harvested Power FluctuationSince the available environmental <strong>energy</strong> varies every day,in this section, we evaluate the impact of harvested powerfluctuation to the systems work in LA, NLA, and oraclemode, respectively. We use the <strong>energy</strong> pattern collected(shown in Figure 22) as a baseline, and generate an <strong>energy</strong>pattern in which the harvested power is varied from 20%to 200% of the baseline <strong>for</strong> each TwinStar node. The metricused is the average detection delay (ADD). As shown inFigure 24, when the harvested power increases, the systemswork in all the 3 modes have smaller average detection delay,and the gap of the ADD among these 3 modes increases.Harvested Power (mW)1801206000 24 48Time (Hour)Harvested Power (mW)00 24 48Time (Hour)(i) Node 9 (j) Node 10 (k) Node 11 (l) Node 12Figure 22: Distribution of Harvested PowerEnergy (J)Energy (J)Energy (J)70005000300010007000500030001000700050003000100018012060Harvested Power (mW)180120N1 N2 N3 N4 N5 N6 N7 N8 N9 N10N11N12Node ID6000 24 48Time (Hour)HarvestedConsumedLeaked(a) Non-<strong>Leakage</strong> Aware NodesHarvestedConsumedLeakedN1 N2 N3 N4 N5 N6 N7 N8 N9 N10N11N12Node ID(b) <strong>Leakage</strong> Aware NodesHarvestedConsumedLeakedN1 N2 N3 N4 N5 N6 N7 N8 N9 N10N11N12Node ID(c) Oracle NodesFigure 23: Distribution of EnergyThe reason is that with more <strong>energy</strong> harvested, more <strong>energy</strong>leaked away in NLA mode. When the harvested power increasesto 200% of the baseline, the ADD of LA is 27% lessthan that of NLA, while the ADD of oracle is only 9% lessthan that of LA.9.5 Impact of Energy PeriodDifferent environments have different period of availableenvironmental <strong>energy</strong>. For example, during the winter season,the solar panel may be covered with snow, which pre-330
Avg. Detection Delay (s)141210864Oracle2LANLA00 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2Harvested Power FluctuationFigure 24: Impact of Harvested Power Fluctuationvents TwinStar nodes from harvesting the environmental <strong>energy</strong>effectively. TwinStar node can only resume to harvestthe <strong>energy</strong> after the snow on the solar panel melts. In thissection, we evaluate the impact of <strong>energy</strong> period to the systemswork in LA, NLA, and oracle mode, respectively. Weuse the <strong>energy</strong> pattern collected (shown in Figure 22) as abaseline, and vary the <strong>energy</strong> period from 12 hours to 48hours. Average detection delay is used to evaluate the systemper<strong>for</strong>mance. Figure 25 shows that when the <strong>energy</strong>period increases, the systems working in all the 3 modeshave higher average detection delay, and the gap of the averagedetection delay among these 3 modes decreases. Thisis because when the <strong>energy</strong> period increases, the TwinStarnodes work more conservatively. When the <strong>energy</strong> period is12 hours, the average detection delay of the network worksin LA mode is 48% less than that works in NLA mode. Theper<strong>for</strong>mance of LA and oracle is very close to each other.Avg. Detection Delay (s)2016128Oracle4LANLA06 12 18 24 30 36 42 48Energy Period (Hour)Figure 25: Impact of Environmental Energy Period10. STATE OF THE ARTEnergy harvesting is the conversion of ambient <strong>energy</strong> intousable electrical <strong>energy</strong>. Several technologies have been developed<strong>for</strong> extracting <strong>energy</strong> from the environment, includingsolar [30], wind [5], kinetic, and vibrational [26] <strong>energy</strong>.With these <strong>energy</strong>-harvesting technologies, researchers havedesigned various types of plat<strong>for</strong>ms to collect ambient <strong>energy</strong>from human activity or environments [20, 16, 5, 30].Notable ones designed specially <strong>for</strong> <strong>sensor</strong> <strong>networks</strong> are Heliomote[16, 1], Prometheus [30], Trio [20], AmbiMax [5] andPUMA [4]. According to the type of <strong>energy</strong> storage used,these plat<strong>for</strong>ms can be separated into three categories: (i)rechargeable battery-based plat<strong>for</strong>ms [1], (ii) designs combiningultra-capacitors and rechargeable batteries [20, 30],and (iii) capacitor-based designs.• In rechargeable battery designs, such as Heliomote [16, 1],the <strong>energy</strong> harvesting panel is directly connected to its battery.As the primary <strong>energy</strong> storage device, the rechargeablebattery is charged and discharged frequently, leading to lowsystem lifetimes due to the physical limitation on the numberof recharge cycles.• In designs that combine ultra-capacitors and rechargeablebatteries such as Prometheus [30], the solar <strong>energy</strong> is firststored in the primary <strong>energy</strong> buffer, which is one or multipleultra-capacitors. The rechargeable batteries are then usedas the secondary <strong>energy</strong> buffer. This design inherits boththe advantages and limitations of batteries and capacitors.For examples, it is difficult to predict remaining <strong>energy</strong> becauseof the inclusion of batteries, and the lifetime of <strong>energy</strong>storage subsystem is decided by the shelf time of batteries(in the order of a few years). Within this category, severalsimilar systems have been built with a few enhancedfeatures. For examples, AmbiMax [5] harvests <strong>energy</strong> frommultiple ambient power sources (e.g., solar and wind generators),and PUMA [4] uses a power routing switch to routemultiple power sources to multiple subsystems. The higherutilization of ambient power is achieved through a combinationof MPPT and power defragmentation.• To our best knowledge, previous works have intentionallyavoided capacitor-only design, citing the leakage issue[30]. To alleviate leakage, small capacitors are normallyused, which makes secondary <strong>energy</strong> storage (batteries)necessary. However, the development of battery capacitiesis very slow and still leakage-prone. In addition,charging efficiency <strong>for</strong> batteries is comparatively low [28].For example, according to the Natural Resources DefenseCouncil [28], common battery chargers provide an efficiencybetween 6% and 40%. Different from previous works, thiswork investigates the frontiers of capacitor-only design andstudies not only hardware designs but also related softwarecontrol techniques to reduce the impact of <strong>energy</strong> leakage.Energy conservation is an intensively studied area.Many solutions have been proposed at different layers, includinghigh-efficiency hardware design [7], link layer design[32], topology management [24], node placement [6],network routing [17], sensing coverage [18], data aggregation[25], data placement [3, 27], operating system [11], andapplication-level <strong>energy</strong>-<strong>aware</strong> designs [12]. However, onlya few works have focused on <strong>energy</strong> measurement [31] and<strong>energy</strong> adaptation [13, 10, 2]. Odyssey [13], and ECOsystem[10] demonstrate that application-level adaptations cansuccessfully meet user-specified lifetimes <strong>for</strong> PDAs and laptopsrunning Linux or other embedded OSes. The differencesbetween these works and ours are that (i) they focuson battery modeling or application adaptations, while ourwork focuses on battery-free design and control, and (ii) theycurrently do not consider <strong>energy</strong> harvesting issues.The most closely related work <strong>for</strong> <strong>energy</strong> adaption isEon [15], which is the first programming language <strong>for</strong> <strong>energy</strong>adaptiveapplications in <strong>wireless</strong> <strong>sensor</strong> <strong>networks</strong>. UsingEon, programmers can easily annotate flows in <strong>energy</strong> states.Eon’s automatic <strong>energy</strong> management uses these annotationsto change application behavior adaptively. Since Eon focuseson language and the adaption layer, it is highly complementaryto the leakage-<strong>aware</strong> hardware and controller designin this work.11. CONCLUSIONSSlow development in battery technology and rapid advancesin ultra-capacitor design have motivated us to investigatethe possibility of using capacitors as the sole <strong>energy</strong>storage <strong>for</strong> <strong>wireless</strong> <strong>sensor</strong> nodes. In this work, webuild TwinStar, an add-on power board that uses <strong>energy</strong>harvesting circuits (e.g., solar panels or wind generators)to harvest the <strong>energy</strong> from the environment and employsan ultra-capacitor as the only <strong>energy</strong> storage unit to powerthe <strong>sensor</strong> node. The Twinstar power board incorporatesa smart control circuit to address the zero-<strong>energy</strong> boot-up331