Navigation for an Intelligent Mobile Robot - IEEE Xplore
Navigation for an Intelligent Mobile Robot - IEEE Xplore
Navigation for an Intelligent Mobile Robot - IEEE Xplore
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
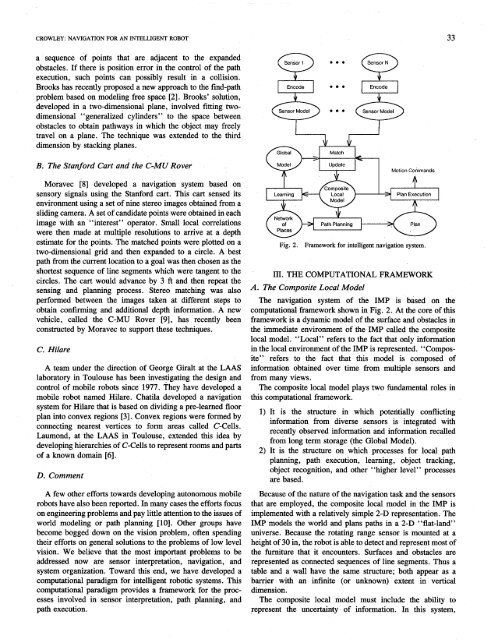
CROWLEY: NAVIGATION FOR AN INTELLIGENT ROBOT 33a sequence of points that are adjacent to the exp<strong>an</strong>dedobstacles. If there is position error in the control of the pathexecution, such points c<strong>an</strong> possibly result in a collision.Brooks has recently proposed a new approach to the find-pathproblem based on modeling free space [2]. Brooks’ solution,developed in a two-dimensional pl<strong>an</strong>e, involved fitting twodimensional“generalized cylinders” to the space betweenobstacles to obtain pathways in which the object may freelytravel on a pl<strong>an</strong>e. The technique was extended to the thirddimension by stacking pl<strong>an</strong>es.B. The St<strong>an</strong><strong>for</strong>d Cart <strong>an</strong>d the C-MU RoverMoravec [8] developed a navigation system based onsensory signals using the St<strong>an</strong><strong>for</strong>d cart. This cart sensed itsenvironment using a set of nine stereo images obtained from asliding camera. A set of c<strong>an</strong>didate points were obtained in eachimage with <strong>an</strong> “interest” operator. Small local correlationswere then made at multiple resolutions to arrive at a depthestimate <strong>for</strong> the points. The matched points were plotted on atwo-dimensional grid <strong>an</strong>d then exp<strong>an</strong>ded to a circle. A bestFig. 2. Framework <strong>for</strong> intelligent navigation system.path from the current location to a goal was then chosen as theshortest sequence of line segments which were t<strong>an</strong>gent to theIII. THE COMPUTATIONAL FRAMEWORKcircles. The cart would adv<strong>an</strong>ce by 3 ft <strong>an</strong>d then repeat thesensing <strong>an</strong>d pl<strong>an</strong>ning process. Stereo matching was also A. The Composite Local Modelper<strong>for</strong>med between the images taken at different steps to The navigation system of the IMP is based on theobtain confirming <strong>an</strong>d additional depth in<strong>for</strong>mation. A new computational framework shown in Fig. 2. At the core of thisvehicle, called the C-MU Rover [9], has recently been framework is a dynamic model of the surface <strong>an</strong>d obstacles inconstructed by Moravec to support these techniques. the immediate environment of the IMP called the compositelocal model. “Local” refers to the fact that only in<strong>for</strong>mationC. Hilarein the local environment of the IMP is represented. “Composite”refers to the fact that this model is composed ofA team under the direction of George Giralt at the LAASlaboratory in Toulouse has been investigating the design <strong>an</strong>dcontrol of mobile robots since 1977. They have developed ain<strong>for</strong>mation obtained over time from multiple sensors <strong>an</strong>dmobile robot named Hilare. Chatila developed a navigationsystem <strong>for</strong> Hilare that is based on dividing a pre-learned floorpl<strong>an</strong> into convex regions [3]. Convex regions were <strong>for</strong>med byconnecting nearest vertices to <strong>for</strong>m areas called C-Cells.Laumond, at the LAAS in Toulouse, extended this idea bydeveloping hierarchies of C-Cells to represent rooms <strong>an</strong>d partsof a known domain [6].D. CommentMotion Comm<strong>an</strong>dsfrom m<strong>an</strong>y views.The composite local model plays two fundamental roles inthis computational framework.1) It is the structure in which potentially conflictingin<strong>for</strong>mation from diverse sensors is integrated withrecently observed in<strong>for</strong>mation <strong>an</strong>d in<strong>for</strong>mation recalledfrom long term storage (the Global Model).2) It is the structure on which processes <strong>for</strong> local pathpl<strong>an</strong>ning, path execution, learning, object tracking,object recognition, <strong>an</strong>d other “higher level” processesare based.A few other ef<strong>for</strong>ts towards developing autonomous mobile Because of the nature of the navigation task <strong>an</strong>d the sensorsrobots have also been reported. In m<strong>an</strong>y cases the ef<strong>for</strong>ts focus that are employed, the composite local model in the IMP ison engineering problems <strong>an</strong>d pay little attention to the issues of implemented with a relatively simple 2-D representation. Theworld modeling or path pl<strong>an</strong>ning [lo]. Other groups have IMP models the world <strong>an</strong>d pl<strong>an</strong>s paths in a 2-D “flat-l<strong>an</strong>d’’become bogged down on the vision problem, often spending universe. Because the rotating r<strong>an</strong>ge sensor is mounted at atheir ef<strong>for</strong>ts on general solutions to the problems of low level height of 30 in, the robot is able to detect <strong>an</strong>d represent most ofvision. We believe that the most import<strong>an</strong>t problems to be the furniture that it encounters. Surfaces<strong>an</strong>dobstacles areaddressed now are sensor interpretation, navigation, <strong>an</strong>dsystem org<strong>an</strong>ization. Toward this end, we have developed arepresented as connected sequences of line segments. Thus atable <strong>an</strong>d a wall have the same structure; both appear as acomputational paradigm <strong>for</strong> intelligent robotic systems. Thiscomputational paradigm provides a framework <strong>for</strong> the procbarrierwith <strong>an</strong>dimension.infinite (or unknown) extent in verticalesses involved in sensor interpretation, path pl<strong>an</strong>ning, <strong>an</strong>d The composite local model must include the ability topath execution.represent the uncertainty of in<strong>for</strong>mation. In this system,