Synchronization - Digital Communication Chapter 6 & 7 - Unik
Synchronization - Digital Communication Chapter 6 & 7 - Unik
Synchronization - Digital Communication Chapter 6 & 7 - Unik

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
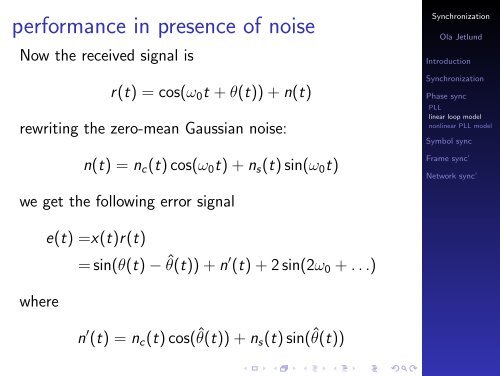
performance in presence of noiseNow the received signal isr(t) = cos(ω 0 t + θ(t)) + n(t)rewriting the zero-mean Gaussian noise:n(t) = n c (t) cos(ω 0 t) + n s (t) sin(ω 0 t)<strong>Synchronization</strong>Ola JetlundIntroduction<strong>Synchronization</strong>Phase syncPLLlinear loop modelnonlinear PLL modelSymbol syncFrame sync’Network sync’we get the following error signale(t) =x(t)r(t)= sin(θ(t) − ˆθ(t)) + n ′ (t) + 2 sin(2ω 0 + . . .)wheren ′ (t) = n c (t) cos(ˆθ(t)) + n s (t) sin(ˆθ(t))