

Sum-of-Squares Applications in Nonlinear Controller Synthesis
Sum-of-Squares Applications in Nonlinear Controller Synthesis
Sum-of-Squares Applications in Nonlinear Controller Synthesis
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
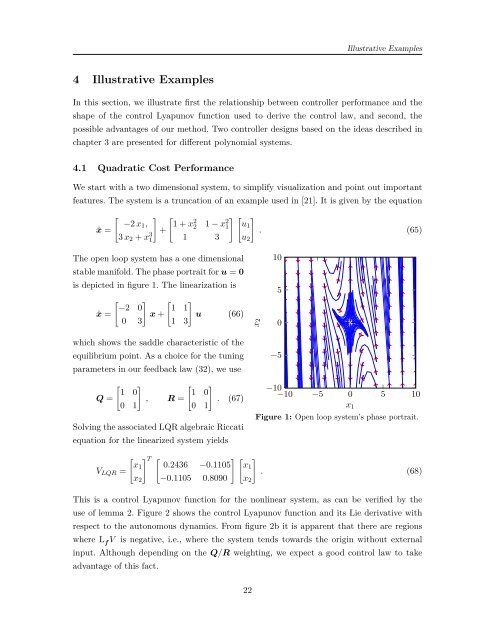
Illustrative Examples4 Illustrative ExamplesIn this section, we illustrate first the relationship between controller performance and theshape <strong>of</strong> the control Lyapunov function used to derive the control law, and second, thepossible advantages <strong>of</strong> our method. Two controller designs based on the ideas described <strong>in</strong>chapter 3 are presented for different polynomial systems.4.1 Quadratic Cost PerformanceWe start with a two dimensional system, to simplify visualization and po<strong>in</strong>t out importantfeatures. The system is a truncation <strong>of</strong> an example used <strong>in</strong> [21]. It is given by the equation[ ] [−2 x1 , 1 + x2ẋ =3 x 2 + x 3 + 2 1 − x 2 ] [ ]1 u1. (65)1 1 3 u 2The open loop system has a one dimensionalstable manifold. The phase portrait for u = 0is depicted <strong>in</strong> figure 1. The l<strong>in</strong>earization is[ ] [ ]−2 0 1 1ẋ = x + u (66)0 3 1 3x21050which shows the saddle characteristic <strong>of</strong> theequilibrium po<strong>in</strong>t. As a choice for the tun<strong>in</strong>gparameters <strong>in</strong> our feedback law (32), we use[ ][ ]1 01 0Q = , R = . (67)0 10 1Solv<strong>in</strong>g the associated LQR algebraic Riccatiequation for the l<strong>in</strong>earized system yields−5−10−10 −5 0 5 10x 1Figure 1: Open loop system’s phase portrait.V LQR =[ ] T [ ] [ ]x1 0.2436 −0.1105 x1x 2 −0.1105 0.8090 x 2. (68)This is a control Lyapunov function for the nonl<strong>in</strong>ear system, as can be verified by theuse <strong>of</strong> lemma 2. Figure 2 shows the control Lyapunov function and its Lie derivative withrespect to the autonomous dynamics. From figure 2b it is apparent that there are regionswhere L f V is negative, i.e., where the system tends towards the orig<strong>in</strong> without external<strong>in</strong>put. Although depend<strong>in</strong>g on the Q/R weight<strong>in</strong>g, we expect a good control law to takeadvantage <strong>of</strong> this fact.22










