

Nessie II Autonomous Underwater Vehicle - Xsens
Nessie II Autonomous Underwater Vehicle - Xsens
Nessie II Autonomous Underwater Vehicle - Xsens
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
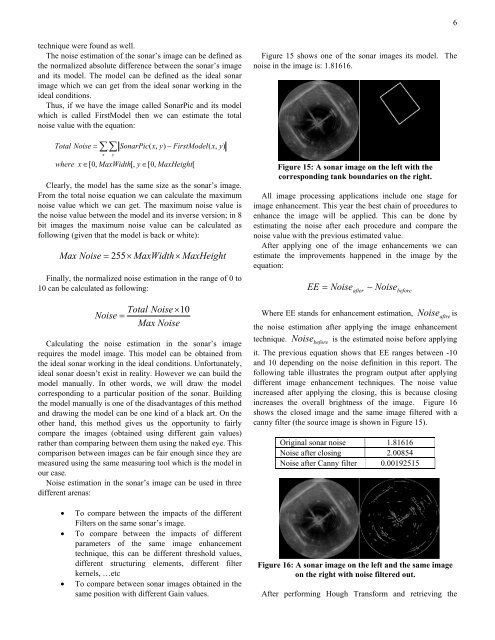
6technique were found as well.The noise estimation of the sonar’s image can be defined asthe normalized absolute difference between the sonar’s imageand its model. The model can be defined as the ideal sonarimage which we can get from the ideal sonar working in theideal conditions.Thus, if we have the image called SonarPic and its modelwhich is called FirstModel then we can estimate the totalnoise value with the equation:Total Noise= ∑∑xySonarPic(x,y)− FirstModel(x,y)where x ∈[0,MaxWidth[,y ∈[0,MaxHeight[Clearly, the model has the same size as the sonar’s image.From the total noise equation we can calculate the maximumnoise value which we can get. The maximum noise value isthe noise value between the model and its inverse version; in 8bit images the maximum noise value can be calculated asfollowing (given that the model is back or white):Max Noise = 255×MaxWidth×MaxHeightFinally, the normalized noise estimation in the range of 0 to10 can be calculated as following:Total Noise×10Noise =Max NoiseCalculating the noise estimation in the sonar’s imagerequires the model image. This model can be obtained fromthe ideal sonar working in the ideal conditions. Unfortunately,ideal sonar doesn’t exist in reality. However we can build themodel manually. In other words, we will draw the modelcorresponding to a particular position of the sonar. Buildingthe model manually is one of the disadvantages of this methodand drawing the model can be one kind of a black art. On theother hand, this method gives us the opportunity to fairlycompare the images (obtained using different gain values)rather than comparing between them using the naked eye. Thiscomparison between images can be fair enough since they aremeasured using the same measuring tool which is the model inour case.Noise estimation in the sonar’s image can be used in threedifferent arenas:• To compare between the impacts of the differentFilters on the same sonar’s image.• To compare between the impacts of differentparameters of the same image enhancementtechnique, this can be different threshold values,different structuring elements, different filterkernels, …etc• To compare between sonar images obtained in thesame position with different Gain values.Figure 15 shows one of the sonar images its model. Thenoise in the image is: 1.81616.Figure 15: A sonar image on the left with thecorresponding tank boundaries on the right.All image processing applications include one stage forimage enhancement. This year the best chain of procedures toenhance the image will be applied. This can be done byestimating the noise after each procedure and compare thenoise value with the previous estimated value.After applying one of the image enhancements we canestimate the improvements happened in the image by theequation:EE = Noise after− Noise beforeNoiseaftreisWhere EE stands for enhancement estimation,the noise estimation after applying the image enhancementtechnique. Noise is the estimated noise before applyingbeforeit. The previous equation shows that EE ranges between -10and 10 depending on the noise definition in this report. Thefollowing table illustrates the program output after applyingdifferent image enhancement techniques. The noise valueincreased after applying the closing, this is because closingincreases the overall brightness of the image. Figure 16shows the closed image and the same image filtered with acanny filter (the source image is shown in Figure 15).Original sonar noise 1.81616Noise after closing 2.00854Noise after Canny filter 0.00192515Figure 16: A sonar image on the left and the same imageon the right with noise filtered out.After performing Hough Transform and retrieving the










