
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
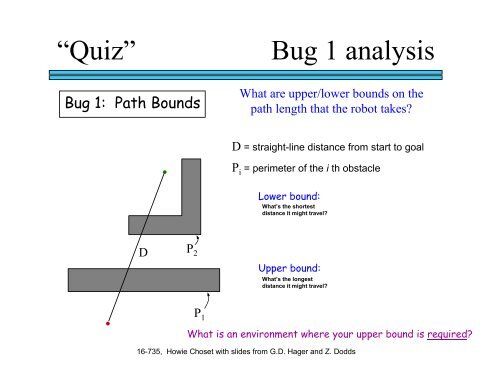
“Quiz”<strong>Bug</strong> 1 analysis<strong>Bug</strong> 1: Path BoundsWhat are upper/lower bounds on thepath length that the robot takes?D = straight-line distance from start to goalP i = perimeter of the i th obstacleLower bound:What’s the shortestdistance it might travel?DP 2Upper bound:What’s the longestdistance it might travel?P 1What is an environment where your upper bound is required?16-735, Howie Choset with slides from G.D. Hager and Z. Dodds