
Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
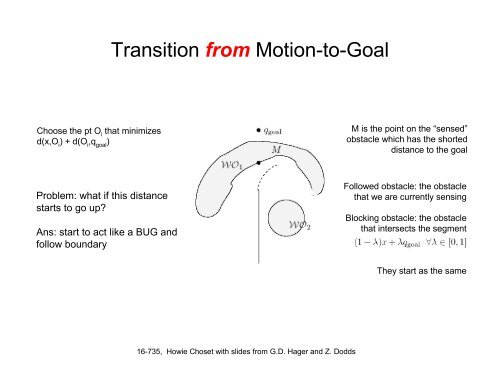
Transition from <strong>Motion</strong>-to-GoalChoose the pt O ithat minimizesd(x,O i) + d(O i,q goal)M is the point on the “sensed”obstacle which has the shorteddistance to the goalProblem: what if this distancestarts to go up?Ans: start to act like a BUG andfollow boundaryFollowed obstacle: the obstaclethat we are currently sensingBlocking obstacle: the obstaclethat intersects the segmentThey start as the same16-735, Howie Choset with slides from G.D. Hager and Z. Dodds