
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
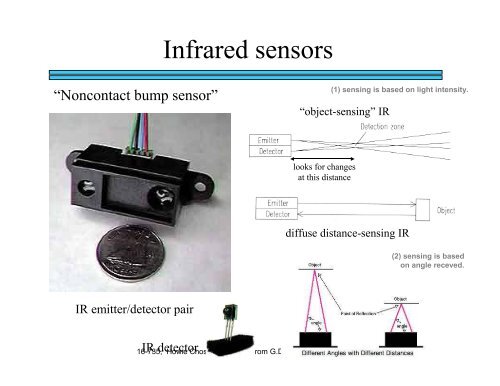
Infrared sensors“Noncontact bump sensor”(1) sensing is based on light intensity.“object-sensing” IRlooks for changesat this distancediffuse distance-sensing IR(2) sensing is basedon angle receved.IR emitter/detector pairIR detector16-735, Howie Choset with slides from G.D. Hager and Z. Dodds