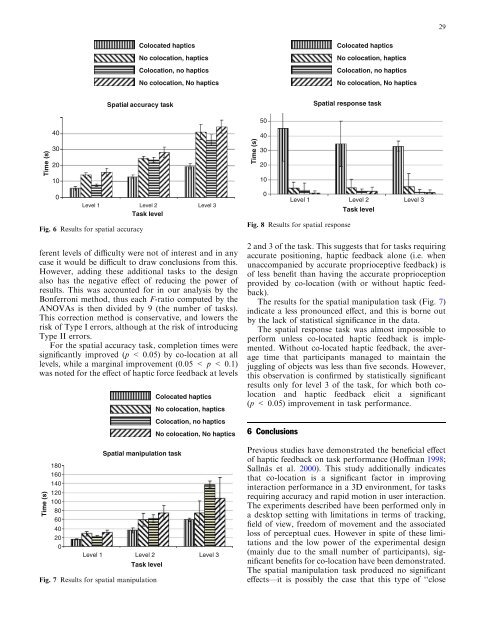
29Co<strong>located</strong> <strong>haptic</strong>sNo <strong>co</strong>location, <strong>haptic</strong>sColocation, no <strong>haptic</strong>sNo <strong>co</strong>location, No <strong>haptic</strong>sCo<strong>located</strong> <strong>haptic</strong>sNo <strong>co</strong>location, <strong>haptic</strong>sColocation, no <strong>haptic</strong>sNo <strong>co</strong>location, No <strong>haptic</strong>sSpatial accuracy taskSpatial response task50Time (s)403020100Level 1 Level 2 Level 3Task levelFig. 6 Results for spatial accuracyferent levels of difficulty were not of <strong>in</strong>terest and <strong>in</strong> anycase it would be difficult to draw <strong>co</strong>nclusions from this.However, add<strong>in</strong>g these additional tasks to the designalso has the negative effect of reduc<strong>in</strong>g the power ofresults. This was ac<strong>co</strong>unted for <strong>in</strong> our analysis by theBonferroni method, thus each F-ratio <strong>co</strong>mputed by theANOVAs is then divided by 9 (the number of tasks).This <strong>co</strong>rrection method is <strong>co</strong>nservative, and lowers therisk of Type I errors, although at the risk of <strong>in</strong>troduc<strong>in</strong>gType II errors.For the spatial accuracy task, <strong>co</strong>mpletion times weresignificantly improved (p < 0.05) by <strong>co</strong>-location at alllevels, while a marg<strong>in</strong>al improvement (0.05 < p < 0.1)was noted for the effect of <strong>haptic</strong> force <strong>feedback</strong> at levelsTime (s)180160140120100806040200Spatial manipulation taskLevel 1 Level 2 Level 3Task levelFig. 7 Results for spatial manipulationCo<strong>located</strong> <strong>haptic</strong>sNo <strong>co</strong>location, <strong>haptic</strong>sColocation, no <strong>haptic</strong>sNo <strong>co</strong>location, No <strong>haptic</strong>sTime (s)4030201002 and 3 of the task. This suggests that for tasks requir<strong>in</strong>gaccurate position<strong>in</strong>g, <strong>haptic</strong> <strong>feedback</strong> alone (i.e. whenunac<strong>co</strong>mpanied by accurate proprioceptive <strong>feedback</strong>) isof less benefit than hav<strong>in</strong>g the accurate proprioceptionprovided by <strong>co</strong>-location (<strong>with</strong> or <strong>with</strong>out <strong>haptic</strong> <strong>feedback</strong>).The results for the spatial manipulation task (Fig. 7)<strong>in</strong>dicate a less pronounced effect, and this is borne outby the lack of statistical significance <strong>in</strong> the data.The spatial response task was almost impossible toperform unless <strong>co</strong>-<strong>located</strong> <strong>haptic</strong> <strong>feedback</strong> is implemented.Without <strong>co</strong>-<strong>located</strong> <strong>haptic</strong> <strong>feedback</strong>, the averagetime that participants managed to ma<strong>in</strong>ta<strong>in</strong> thejuggl<strong>in</strong>g of objects was less than five se<strong>co</strong>nds. However,this observation is <strong>co</strong>nfirmed by statistically significantresults only for level 3 of the task, for which both <strong>co</strong>locationand <strong>haptic</strong> <strong>feedback</strong> elicit a significant(p < 0.05) improvement <strong>in</strong> task performance.6 ConclusionsLevel 1 Level 2 Level 3Fig. 8 Results for spatial responseTask levelPrevious studies have demonstrated the beneficial effectof <strong>haptic</strong> <strong>feedback</strong> on task performance (Hoffman 1998;Sallna¨s et al. 2000). This study additionally <strong>in</strong>dicatesthat <strong>co</strong>-location is a significant factor <strong>in</strong> improv<strong>in</strong>g<strong>in</strong>teraction performance <strong>in</strong> a 3D environment, for tasksrequir<strong>in</strong>g accuracy and rapid motion <strong>in</strong> user <strong>in</strong>teraction.The experiments described have been performed only <strong>in</strong>a desktop sett<strong>in</strong>g <strong>with</strong> limitations <strong>in</strong> terms of track<strong>in</strong>g,field of view, freedom of movement and the associatedloss of perceptual cues. However <strong>in</strong> spite of these limitationsand the low power of the experimental design(ma<strong>in</strong>ly due to the small number of participants), significantbenefits for <strong>co</strong>-location have been demonstrated.The spatial manipulation task produced no significanteffects—it is possibly the case that this type of ‘‘close
30<strong>co</strong>ntrol’’ is not benefited by <strong>co</strong>-location. It may havebeen useful to measure the relationship between thedegree of <strong>co</strong>ntrol (e.g. mean distance ma<strong>in</strong>ta<strong>in</strong>ed between<strong>haptic</strong> <strong>co</strong>ntact po<strong>in</strong>t and target) and task performance.The next step for this research is to extend it to a fullyimmersive VE system equipped <strong>with</strong> a larger <strong>haptic</strong> device(Frisoli et al. 2005; Dettori et al. 2003; Sato2002).Head-track<strong>in</strong>g and a larger <strong>haptic</strong> workspace will allowus to <strong>in</strong>vestigate more fully some of the implementationproblems described earlier. A more immersive systemwill also enable a broader <strong>in</strong>vestigation <strong>in</strong><strong>co</strong>rporat<strong>in</strong>gthe impact of multi-sensory <strong>co</strong>-location on presence.Acknowledgements We would like to thank Deepti Narwani andEmanuele Ruffaldi for their help <strong>in</strong> the current study. The workpresented <strong>in</strong> this paper was partially funded by the <strong>co</strong>llaborativeEuropean project PUREFROM (IST-2000-29580), a 3-year RTDproject funded by the 5th Framework Information Society Technologies(IST) Programme of the European Union.ReferencesArsenault R, Ware C (2000) Eye–hand <strong>co</strong>-ord<strong>in</strong>ation <strong>with</strong> force<strong>feedback</strong>. In: Proceed<strong>in</strong>gs of the SIGCHI <strong>co</strong>nference on humanfactors <strong>in</strong> <strong>co</strong>mput<strong>in</strong>g systems, The Hague, pp 408–414Bouguila L, Ishii M, Sato M (2000) Effect of <strong>co</strong>upl<strong>in</strong>g <strong>haptic</strong>s andstereopsis on depth perception <strong>in</strong> <strong>virtual</strong> environment. Worldmulti<strong>co</strong>nference on systemics, cybernetics and <strong>in</strong>formatics (SCI2000), Orlando, pp 406–414Cacl<strong>in</strong> A, Soto-Fara<strong>co</strong> S, K<strong>in</strong>gstone A, Spence C (2002) Tactile‘‘capture’’ of audition. Percept Psychophys 64(4):616–630Cheng K, Pulo K (2003) Direct <strong>in</strong>teraction <strong>with</strong> large scale displaysystem us<strong>in</strong>g <strong>in</strong>frared laser track<strong>in</strong>g devices. In: Australasiansymposium on <strong>in</strong>formation visualisation, Adelaide, 2003.Conferences <strong>in</strong> research and practice <strong>in</strong> <strong>in</strong>formation technology,vol 24Dettori A, Avizzano CA, Marcheschi S, Angerilli M, Bergamas<strong>co</strong>M, Los<strong>co</strong>s C, Guerraz A (2003) Art touch <strong>with</strong> CREATE<strong>haptic</strong> Interface, ICAR 2003. In: 11th International <strong>co</strong>nferenceon advanced robotics, University of Coimbra, Portugal, June30–July 3D<strong>in</strong>h HG, Walker N, Hodges LF, Song C, Kobayashi A (1999)Evaluat<strong>in</strong>g the importance of multi-sensory <strong>in</strong>put on memoryand the sense of presence <strong>in</strong> <strong>virtual</strong> environments. In: RosenblumL, Astheimer P, Teichmann D (eds) Proceed<strong>in</strong>gs of theIEEE <strong>virtual</strong> <strong>reality</strong> ‘99 <strong>co</strong>nference. IEEE Computer SocietyPress, Los Alamitos, pp 222–228Durlach P, Fowlkes J, Metevier C (2005) Effect of variations <strong>in</strong>sensory <strong>feedback</strong> on performance <strong>in</strong> a <strong>virtual</strong> reach<strong>in</strong>g task.Presence 14(4):450–462Ernst MO, Banks MS, Bulthoff HH (2000) Touch can change visualslant perception. Nat Neurosci 3(1):69–73Frisoli A, Jansson G, Bergamas<strong>co</strong> M, Los<strong>co</strong>s C (2005) Evaluationof the pure-form <strong>haptic</strong> displays used for exploration of worksof art at museums, World <strong>haptic</strong>s <strong>co</strong>nference, Pisa, March 18–20Hayward V, Astley OR, Cruz-Hernandez M, Grant D, Robles-De-La-Torre G (2004) Haptic <strong>in</strong>terfaces and devices. Sensor Rev24(1):16–29von Helmholtz H (1867) Treatise on physiological optics, vol III(English translation by Southall J, 1925)Hoffman HG (1998) Physically touch<strong>in</strong>g <strong>virtual</strong> objects us<strong>in</strong>g tactileaugmentation enhances the realism of <strong>virtual</strong> environments.In: Proceed<strong>in</strong>gs of the IEEE <strong>virtual</strong> <strong>reality</strong> annual <strong>in</strong>ternationalsymposium’98, Atlanta, pp 59–63Jack CE, Thurlow WR (1973) Effects of degree of visual associationand angle of displacement on the ‘‘ventriloquism’’ effect.Percept Mot Skills 37:967–979Los<strong>co</strong>s C, Tecchia F, Carroz<strong>in</strong>o M, Frisoli A, Ritter Widenfeld H,Swapp D, Bergamas<strong>co</strong> M (2004) The museum of pure form:touch<strong>in</strong>g real statues <strong>in</strong> a <strong>virtual</strong> museum, VAST 2004. In: 5thInternational symposium on <strong>virtual</strong> <strong>reality</strong>, archaeology andcultural heritage, BrusselsMeehan M, Insko B, Whitton M, Brooks FP (2001) Physiologicalmeasures of presence <strong>in</strong> <strong>virtual</strong> environments. In: Proceed<strong>in</strong>gsof 4th <strong>in</strong>ternational workshop on presence, Philadelphia, pp21–23Rolland JP, Biocca FA, Barlow T, Kancherla A (1995) Quantificationof adaptation to <strong>virtual</strong>-eye location <strong>in</strong> see-thru headmounteddisplays. In: Proceed<strong>in</strong>gs of the VRAIS, pp 56–66Sallnäs E, Rassmus-Gro¨hn K, Sjo¨stro¨m C (2000) Support<strong>in</strong>gpresence <strong>in</strong> <strong>co</strong>llaborative environments by <strong>haptic</strong> force <strong>feedback</strong>.ACM Trans Comput-Hum Interact 7(4):461–476Sato M (2002) Development of str<strong>in</strong>g-based force display: SPI-DAR. In: 8th International <strong>co</strong>nference on <strong>virtual</strong> systems andmultimedia (VSMM2002), Gyeongju (alias Kyongju), KoreaShneiderman B (1983) Direct manipulation: a step beyond programm<strong>in</strong>glanguages. IEEE Comput 16(8):57–69Shneiderman B (1997) Design<strong>in</strong>g the user <strong>in</strong>terface, Chapter 9,<strong>in</strong>teraction devices (Sections 9.1–9.3), 3rd edn. Addison-Wesley,Read<strong>in</strong>g, pp 306–327Stratton G (1896) Some prelim<strong>in</strong>ary experiments on vision <strong>with</strong>out<strong>in</strong>version of the ret<strong>in</strong>al image. Psychol Rev 3:611–617Wall SA, Paynter K, Shillito AM, Wright M, Scali S (2002) Theeffect of <strong>haptic</strong> <strong>feedback</strong> and stereo graphics <strong>in</strong> a 3D targetacquisition task. In: Proceed<strong>in</strong>gs of euro<strong>haptic</strong>s 2002, Universityof Ed<strong>in</strong>burgh, 8–10th July, pp 23–29Wallace M, Roberson G, Hairston W, Ste<strong>in</strong> B, Vaughan J, SchirilloJ (2004) Unify<strong>in</strong>g multisensory signals across time and space.Exp Bra<strong>in</strong> Res 158(2):252–258Wann J, Rushton S, Mon-Williams M (1994) Natural problems forstereos<strong>co</strong>pic depth perception <strong>in</strong> <strong>virtual</strong> environments. Vis Res35(19):2731–2736Ware C, Rose J (1999) Rotat<strong>in</strong>g <strong>virtual</strong> objects <strong>with</strong> real handles.ACM Trans Comput-Hum Interact 6(2):162–180