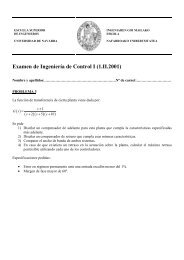
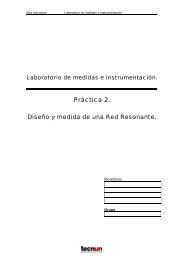
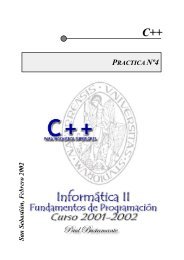
The membrane structure has been modeled by means of a cable network. The first task consists in thegeneration of an initial grid, with nodes and elements connecting these nodes.In the next step, the equilibrium shape of the membrane is calculated using a <strong>for</strong>mfinding method or anon linear <strong>approach</strong>. More details about these equilibrium methods are given later. A new position <strong>for</strong>the nodes is obtained, that satisfy this equilibrium shape.Grid Generation Form-finding Surface <strong>fitting</strong> RenderFigure 4.- Hybrid method proposed <strong>for</strong> <strong>tensile</strong> membrane <strong>design</strong>Once the nodes have reached the equilibrium state, a parametric <strong>surface</strong> that passes through the givennodes is generated. This process is called <strong>surface</strong> <strong>fitting</strong>, and will be described later.Finally, a render representation of the membrane can be obtained from the previous parametric <strong>surface</strong>.Figure 5 shows graphically and example of the steps described <strong>for</strong> the proposed method. In thisexample, a 3x3 grid (a) has been used to obtain the equilibrium shape (b) of the membrane. From thisequilibrium shape, a parametric <strong>surface</strong> is obtained (c) and a render representation of the membrane hasbeen generated (d).(a)(b)(c ) (d)Figure 5. Hybrid method <strong>for</strong> <strong>tensile</strong> membrane <strong>design</strong>. (a) Grid Generation,(b) <strong>for</strong>mfinding, (c) Surface <strong>fitting</strong>, (d) render representation
The analysis of <strong>tensile</strong> structures is a geometrically non-linear problem, and consists on finding theequilibrium shape compatible with the given prestress conditions. The process of determining thisinitial equilibrium shape is known as <strong>for</strong>mfinding.In computer analysis, the membrane is divided in a discrete number of elements, joined at nodes.Material properties and loads are defined at a discrete number of locations. Some nodes may berestrained, and others are free to translate and rotate.Form finding Methods <strong>for</strong> <strong>tensile</strong> <strong>membranes</strong> analysisMany methods of analysis have been implemented in the last years, in order to study <strong>tensile</strong><strong>membranes</strong> behavior. Force Density Method [SHE74], Surface Stress Density Method [MAU98] andDynamic Relaxation [BAR99] are the most common ones used <strong>for</strong> the <strong>for</strong>m-finding process.Force Density Method uses an analytic technique to linearize the <strong>for</strong>m finding equations <strong>for</strong> a tensionnet. This linearization makes the method independent of the material properties of the membrane. Forcedensity ratios (cable <strong>for</strong>ce divided by cable length) need to be specified <strong>for</strong> each element, and differentratios give different equilibrium shapes. The method is numerically robust, independent of the initiallocations of the nodes, and the equilibrium shape is found easily. The <strong>for</strong>ce density solution to appliedloads is non-linear, and requires iteration.Surface Stress Density Method can be considered as a generalization of linear <strong>for</strong>ce density method tothe bidimensional case, and takes into account the shear stress. In this case, the <strong>surface</strong> stress densityratio is given by the stress divided by the area of the element.Dinamic Relaxation method solves the geometric non-linear problem by equating it to a dynamicproblem. Principles of dynamic are used to solve the analysis. Appropriate dynamic properties need tobe defined, like the mass and damping characteristics of the membrane. A balance of <strong>for</strong>ces is made ateach node, giving a residual <strong>for</strong>ce that produces the movement of the node in the direction of this <strong>for</strong>ce,according to the dynamic behavior of the net. New positions <strong>for</strong> the nodes are calculated until the finalequilibrium shape is reached. At this point the residual <strong>for</strong>ces are sufficiently small.Non linear <strong>approach</strong> <strong>for</strong> <strong>tensile</strong> <strong>membranes</strong> analysisAs described be<strong>for</strong>e, the analysis of <strong>tensile</strong> structures is a geometrically non-linear problem. Thestiffness method solves a set of equations (1) that represents the translational and rotational equilibriumat each node of the structure.P = K ⋅ U(1)[ ] [ ] [ ]where [P] is the applied nodal loads vector; [K] is the Stiffness Matrix; and [U] is the Nodaldisplacement vector.This method required an iterative process, until equilibrium shape compatible with the given prestressconditions is reached. At each step, a global stiffness matrix is recalculated, according to the newposition of the nodes, and the material properties of the membrane. Applied loads are considered in theanalysis.Surface <strong>fitting</strong> <strong>approach</strong>Once the equilibrium shape has been reached by any of the method described be<strong>for</strong>e, the <strong>surface</strong> <strong>fitting</strong><strong>approach</strong> is carried out. The geometry of a membrane structure can be easily represented using aparametric <strong>surface</strong>. Once the nodes have reached the equilibrium state, a parametric <strong>surface</strong> that passesthrough the given nodes is generated. This process is called <strong>surface</strong> <strong>fitting</strong>.At this stage, the control net is calculated from the position of the nodes at the equilibrium state. Theshape of the parametric <strong>surface</strong> depends on this control net. Final shape of the <strong>surface</strong> is given afterevaluating the expression (2), <strong>for</strong> Non-uni<strong>for</strong>m Rational B-Splines (NURBS).hBi , jN kn + 1 m+1i=1 j = 1( u,w) = ∑∑Q B(2)hi, jNi,k( u)Mj,l( w)s are the four-dimensional homogeneous control net vertices.i ,( u)and M j , l( w)are the nonrational B-spline basis functions.