Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ESCUELA SUPERIOR DE INGENIEROSINDUSTRIALES DE SAN SEBASTIANUNIVERSIDAD DE NAVARRAMANUAL BASICODEL ROBOT <strong>ASEA</strong>Edward MARTADpto. <strong>de</strong> Ingenieria MecanicaLaboratorio CIMJulio 1996
INDICE1. SEGURIDAD1.1 Funciones <strong>de</strong> seguridad incorporadas1.1.1 Paro <strong>de</strong> emergencia1. 1.2 Paro <strong>de</strong> trabajo1.2 Procesamientos durante la programacion1112 CARACTERISTICAS DEL ROBOT2.1 Descripcion <strong>de</strong>l sistema2.2 Robot mecanico2.2.1 Sistema <strong>de</strong> accionamiento2.2.2 Frenos2.2.3 Estructuras <strong>de</strong> movimiento2.3 Sistema <strong>de</strong> coor<strong>de</strong>nadas2.3.1 Sistema <strong>de</strong> coor<strong>de</strong>nadas para las posiciones2.3.2 Sistema <strong>de</strong> coor<strong>de</strong>nadas para las trayectorias2.3.3 Sistema <strong>de</strong> coor<strong>de</strong>nadas para movimientos manuales2.4 Sistema <strong>de</strong>control2.4.1 Programacion y comunicacion2.4.2 Caracteristicas <strong>de</strong>l sistema <strong>de</strong> control2.4.3 Distribucion y localizacion <strong>de</strong> las unida<strong>de</strong>s2.5 Especificacion tecnica2.5.1 Funcionamiento2.5.2 Capacidad <strong>de</strong> carga2.5.3 Capacidad <strong>de</strong> programacion2.5.4 Capacidad <strong>de</strong> interconexion2.5.5 Capacidad <strong>de</strong> hombre-maquina2.5.6 Campo <strong>de</strong> accion34444557899910121212131414153 PROGRAMACION DEL ROBOT3.1 Panel <strong>de</strong>control3.2 Unidad <strong>de</strong> programacion3.3 Palanca <strong>de</strong> mando3.4 Programacion <strong>de</strong> posiciones3.4.1 Configuracion <strong>de</strong>l robot161618192020
3.5 Velocidad <strong>de</strong> movimiento 203.6 Optimizacion <strong>de</strong> la velocidad 203.7 Puntos singulares 213.8 Seguimiento <strong>de</strong> la trayectoria 213.8.1 Principios 22.3 . 8.2 Zonas 223.8.3 Velocidad <strong>de</strong> lo largo <strong>de</strong> la trayectoria 233.8.4 Velocidad a lo largo <strong>de</strong> la curva 233.8.5 Redon<strong>de</strong>amiento <strong>de</strong> las esquinas 243.9 Programacion <strong>de</strong> circulos 253.10 Excepciones 263.11 TCP fijo 263.11.1 Movimiento <strong>de</strong>l robot mediante la palanca <strong>de</strong> mando 273.11.2 Ejecucion <strong>de</strong>l programa en TCP fijo 271 1 3 Limitaciones 294 OPERACION 304.1 Puesta en marcha, sincronizacion y apagado <strong>de</strong>l sistema 304.2 Funcionamiento 314.3 Paro 315 REGISTROS 326 MENUS PARA LA PROGRAMACION ON-LINE 336.1 Instrucciones logicas 336.2 Instrucciones <strong>de</strong> posicionamiento 346.3 Modo automatico 356.4 Funciones <strong>de</strong> edicion 366.5 Funcionamiento manual 377 LISTADO DE UN PROGRAMA 38
1 SEGURIDADMientras se trabaja en el area <strong>de</strong> trabajo <strong>de</strong>l robot:• Se <strong>de</strong>bera evitar trabajar solo cuando el sistema esta en el modo FUNCIONAMIENTO(RUN). Se aconseja que permanezca alguien fuera <strong>de</strong>l area <strong>de</strong> trabajo para asumir la unicaresponsabilidad que consiste en disparar el paro <strong>de</strong> emergencia en caso <strong>de</strong> peligro.• Se <strong>de</strong>berd conectar la unidad <strong>de</strong> programacion y extraerla <strong>de</strong> su compartimiento situadoen el armario <strong>de</strong> control. Tomar la unidad <strong>de</strong> programacion consigo <strong>de</strong>ntro <strong>de</strong>l area <strong>de</strong> trabajo<strong>de</strong>l robot. Cuando la palanca <strong>de</strong> seguridad esta soltada la fuente <strong>de</strong> alimentacion quesuministra a los motores <strong>de</strong>l robot queda <strong>de</strong>sconectada automaticamente y el robot se pone enel modo PREPARADO (STANBAY).• Un robot en movimiento pue<strong>de</strong> realizar movimientos inesperados. Recuer<strong>de</strong> los riesgosconsecuentes para las personas que puedan encontrarse en la proximidad <strong>de</strong>l robot.1.1 Funciones <strong>de</strong> seguridad incorporadasEl robot esta equipado con un sistema <strong>de</strong> auto supervision integrado, es <strong>de</strong>cir, que cuando elsistema <strong>de</strong>tects un funcionamiento <strong>de</strong>fectuoso <strong>de</strong> un componente en un canal, el robot pasa almodo PREPARADO don<strong>de</strong> los motores <strong>de</strong>l sistema robot quedan <strong>de</strong>sconectados y los frenosentran en funcionamiento.Todos los tipos <strong>de</strong> paro <strong>de</strong>l sistema conducen al modo PREPARADO. Las operacionesnecesarias para regresar al modo FUNCIONAMIENTO cuando se vuelve a aplicar tension alos motores, difieren para cads tipo <strong>de</strong> paro.1.1.1 Paro <strong>de</strong> emergenciaPue<strong>de</strong> ser manual mediante los pulsadores <strong>de</strong> paro <strong>de</strong> emergencia situados en el panel <strong>de</strong>control y la unidad <strong>de</strong> programacion, y automatica con el circuito <strong>de</strong> paro <strong>de</strong> emergencia <strong>de</strong>lsistema. Nunca se <strong>de</strong>bera anular un paro <strong>de</strong> emergencia antes <strong>de</strong> haber <strong>de</strong>terminado la causaque lo ha provocado y <strong>de</strong> haber corregido el fallo.1.1.2 Paro <strong>de</strong> trabajoSirve para proteger a las personas que entrap en el area <strong>de</strong> trabajo <strong>de</strong> forma ina<strong>de</strong>cuada. Elparo <strong>de</strong> trabajo pue<strong>de</strong> dispararse <strong>de</strong>bido a tres razones diferentes• La unidad <strong>de</strong> programacion conectada al sistema robot esta extraida <strong>de</strong> sucompartimiento.• El interruptor <strong>de</strong> Have para el funcionamiento al 100% <strong>de</strong> la velocidad esta puesto en laposicion "on".I
• Un paro <strong>de</strong> trabajo conectado por el usuario a traves <strong>de</strong> un dispositivo externo estaroto.El modo FUNCIONAMIENTO pue<strong>de</strong> recuperarse durante un paro <strong>de</strong> trabajo pulsando lapalanca <strong>de</strong> seguridad en la unidad <strong>de</strong> programacion. El sistema regresa al modoPREPARADO cuando se suelta la palanca.1.2 Procedimientos durante la programacionPara una operacion segura <strong>de</strong>l sistema robot, se <strong>de</strong>bera seguir las siguientesrecomendaciones• Mantener la puerta <strong>de</strong>l armario <strong>de</strong> control cerrada.• Pulsar el bloqueo <strong>de</strong> programa en el panel <strong>de</strong> control.Durante la programacion:• En el caso en que el sistema robot este datado <strong>de</strong> enlace a or<strong>de</strong>nador, asegurase <strong>de</strong> quedicho sistema robot este en modo local, controlado <strong>de</strong>s<strong>de</strong> <strong>de</strong> la unidad <strong>de</strong>programacion (vease en el Menu Manual).• Comprobar la funcion <strong>de</strong>l paro <strong>de</strong> emergencia y <strong>de</strong> la palanca <strong>de</strong> seguridad antes <strong>de</strong> lapuesta en marcha <strong>de</strong>l sistema.• Hacer una prueba <strong>de</strong> comprobacion <strong>de</strong>l funcionamiento <strong>de</strong> los nuevos programas avelocidad reducida_• Crear una estructura <strong>de</strong> programs logica y clara en la que el programa principalcontrola en funcionamiento <strong>de</strong> todos los <strong>de</strong>mas subprogramas.• Anotar todos los subprogramas en el papel. El texto explicativo referente a laestructura <strong>de</strong>l programa simplificara consi<strong>de</strong>rablemente las revisiones ulteriores.• Empezar cada programs principal con instrucciones que <strong>de</strong>fmen el estado <strong>de</strong>l sistemarobot en el momento <strong>de</strong> la puesta en marcha <strong>de</strong> la ejecucion <strong>de</strong>l programs, porejemplo:Velocida<strong>de</strong>s maxima y basicaLa localizacion basica <strong>de</strong>l sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong>l sistema robot - base <strong>de</strong>coor<strong>de</strong>nadas 0.TCP activo.Sistema <strong>de</strong> coor<strong>de</strong>nadas para la ejecucion <strong>de</strong>l programa.
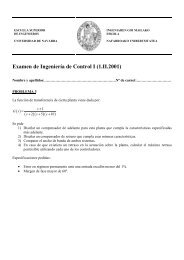
Modo abierto para la pima.Desactivacion <strong>de</strong>l punto <strong>de</strong> referencia.2. CARACTERISTICAS DEL ROBOT <strong>ASEA</strong>2.1 Descripcion <strong>de</strong>l sistemaEl sistema basico consta <strong>de</strong>:• Robot mecanico.• Sistema <strong>de</strong> control.El sistema <strong>de</strong> control contiene la totalidad <strong>de</strong> la electronica <strong>de</strong>l sistema y tiene lasposibilida<strong>de</strong>s <strong>de</strong> comunicacion con el exterior y control <strong>de</strong> equipos perifericos.Figura 1. Estructura <strong>de</strong>l sistema <strong>IRB</strong><strong>2000</strong>.
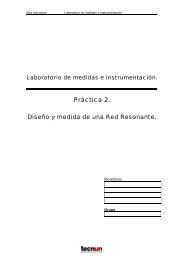
Para la comunicacion con el operario, se dispone <strong>de</strong> un panel <strong>de</strong> operacion. Laprogramacion y el funcionamiento en manual, se realiza a traves <strong>de</strong> la unidad <strong>de</strong>programacion portatil. La programacion se realiza tambien "off-line", mediante un or<strong>de</strong>nadory el paquete <strong>de</strong> software <strong>de</strong> programacion "off-line" <strong>de</strong> <strong>ASEA</strong>.2.2 Robot mecanico2.2.1 Sistema <strong>de</strong> accionamientoEn el sistema <strong>de</strong> accionamiento, los motores estan servocontrolados, son <strong>de</strong> corrientealterna, sin escobillas, adaptados especialmente para cada eje. La realizacion <strong>de</strong>lservosistema, en todos los ejes, consta <strong>de</strong>:• Un tacometro para el control <strong>de</strong> velocidad.• Un resolver para la indicacion <strong>de</strong> posicion.• Un resolver adicional para el sistema <strong>de</strong> medicion absoluta (opcion).2.2.2. FrenosEl robot va equipado con frenos en todos los ejes, y queda frenado automaticamente enlas paradas <strong>de</strong> emergencia, fallos <strong>de</strong> suministro, o cuando se <strong>de</strong>sconecta la tension <strong>de</strong> losmotores, poniendolo en modo "preparado" o totalmente <strong>de</strong>sconectado. Si el robot, estando enfuncionamiento, permanece estatico, los frenos se activan a los tres segundos (funcionamientoautomatico) o los cinco segundos (funcionamiento manual).Los frenos pue<strong>de</strong>n ser, uno por uno, <strong>de</strong>sactivados manualmente mediante conmutadoressituados en la lateral <strong>de</strong>l robot.2.2.3. Estructura <strong>de</strong> movimientosLos movimientos <strong>de</strong>l robot pue<strong>de</strong>n ser <strong>de</strong>scritos brevemente como se ve en la figura 2 <strong>de</strong>la forma siguiente:Eje (1): Giro <strong>de</strong> todo el robot mecanico.Eje (2): Movimiento hacia a<strong>de</strong>lante y hacia atras <strong>de</strong>l brazo inferior.Eje (3): Movimiento hacia arriba y hacia abajo <strong>de</strong>l brazo superior.Eje (4): Giro <strong>de</strong> toda la mufieca.Eje (5): Movimiento pendular <strong>de</strong> la mufieca respecto a su eje.Eje (6): Giro <strong>de</strong> la placa <strong>de</strong> acoplamiento.4
Figura 2. Estructura <strong>de</strong> los movimientos <strong>de</strong>l robot2.3 Sistema <strong>de</strong> coor<strong>de</strong>nadas2.3.1 Sistemas <strong>de</strong> coor<strong>de</strong>nadas para las posicionesTodas las posiciones <strong>de</strong>l robot se expresan mediante los valores <strong>de</strong> coor<strong>de</strong>nadas. Estosvalores <strong>de</strong>scriben las posiciones <strong>de</strong>l robot en el espacio. Para saber como interpretar lascoor<strong>de</strong>nadas, es <strong>de</strong>cir, saber <strong>de</strong>s<strong>de</strong> que punto <strong>de</strong> referencia y en que direccion se <strong>de</strong>be medirla posicion, se <strong>de</strong>bera <strong>de</strong>finir una base <strong>de</strong> referencia o un sistema <strong>de</strong> coor<strong>de</strong>nadas, como estamostrado en la figura siguiente.Los calculos internos <strong>de</strong>l controlador <strong>de</strong>l robot se expresan en el sistema <strong>de</strong> coor<strong>de</strong>nadasen la base (BCS:Base Coor<strong>de</strong>nate System). Este sistema esta fijado a la base <strong>de</strong>l robot con elpiano x-y en el suelo y el eje z apuntando hacia arriba y concentrico respecto al primer eje <strong>de</strong>rotacion.5
Sin embargo, no se suele expresar las posiciones programadas en el BCS, por la simplerazon <strong>de</strong> que luego resultara mucho mas dificil cambiar las posiciones en el caso <strong>de</strong> cambio<strong>de</strong> instalacion <strong>de</strong>l robot, en este caso los movimientos relativos son los mismos, pero lasposiciones <strong>de</strong>berian estar situadas un poco <strong>de</strong>spla7a das. Entonces no es necesario reprogramartodas las posiciones sino unicamente volver a <strong>de</strong>finir el sistema <strong>de</strong> coor<strong>de</strong>nadas utilizado. Poreso, se usa un sistema <strong>de</strong> coor<strong>de</strong>nadas global (WCS: World Coor<strong>de</strong>nate System) para <strong>de</strong>finirlas posiciones almacenadas.Figura 3. Sistemas <strong>de</strong> coor<strong>de</strong>nadas utilizados en la programacion.El <strong>de</strong>splazamiento <strong>de</strong>l WCS respecto al BCS se <strong>de</strong>fine con el valor BASE, quecontiene un valor x, y, z que <strong>de</strong>fine el <strong>de</strong>splazamiento y un cuaternio (un vector <strong>de</strong> cuatrovalores) que <strong>de</strong>fine la orientacion.En algunos casos se requiere un <strong>de</strong>splazamiento temporal, don<strong>de</strong> la posicion se expresaen un sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong>l objeto (OCS: Object Coor<strong>de</strong>nate System) y el<strong>de</strong>splazamiento esta <strong>de</strong>finido con un PUNTO DE REFERENCIA.6
El sistema <strong>de</strong> coor<strong>de</strong>nadas que se encuentra mas al extremo <strong>de</strong> la figura 3 es el sistema <strong>de</strong>coor<strong>de</strong>nadas final (GCS: Goal Coor<strong>de</strong>nate System) que <strong>de</strong>fine la posicion final que el robot<strong>de</strong>bera alcanzar su herramienta.A modo <strong>de</strong> resumen, la posicion y la orientacion final se almacenan siempre en unainstruccion <strong>de</strong> posicionamiento respecto al OCS_ La localizacion <strong>de</strong>l OCS se <strong>de</strong>fine respectoal GCS con un PUNTO <strong>de</strong> REF. Si el punto <strong>de</strong> referencia no es activo, los sistemas OCS yGCS coincidiran.La localizacion <strong>de</strong>l GCS se <strong>de</strong>fine respecto al BCS con BASE <strong>de</strong> COORDENADAS. Sino hay base <strong>de</strong> coor<strong>de</strong>nadas activa, los sistemas GCS y BCS coincidiran.2.3.2. Sistemas <strong>de</strong> coor<strong>de</strong>nadas para las trayectoriasLa trayectoria entre posiciones pue<strong>de</strong> ejecutarse en tres sistemas <strong>de</strong> coor<strong>de</strong>nadasdiferentes: coor<strong>de</strong>nadas rectangulares, coor<strong>de</strong>nadas robot, coor<strong>de</strong>nadas rectangularesmodificadas. Todos los sistemas podrin ser activados mediante instrucciones en un programarobot. Cada uno <strong>de</strong> estos sistemas <strong>de</strong> coor<strong>de</strong>nadas producira una trayectoria ligeramentedistinta y se usa segun las priorida<strong>de</strong>s <strong>de</strong> velocidad, precision y orientacion.1) Coor<strong>de</strong>nadas Rectangulares: Son las coor<strong>de</strong>nadas por <strong>de</strong>fecto, se usan en la mayoria<strong>de</strong> los movimientos, la trayectoria seguida por el TCP (Tool Center Point) es lineal o circularsegun la instruccion <strong>de</strong> posicion utilizada. La orientacion cambia regularmente a partir <strong>de</strong> laorientacion <strong>de</strong> <strong>arranque</strong> hasta la orientacion final, si son las mismas la orientacion semantiene constante. Cuando el TCP pasa cerca <strong>de</strong> un punto singular, se disminuye lavelocidad.2) Coor<strong>de</strong>nadas Robot Cuando el robot funciona en este modo, todos los ejes se muevencon velocida<strong>de</strong>s constantes <strong>de</strong>s<strong>de</strong> la posicion <strong>de</strong> <strong>arranque</strong> hasta la posicion final y latrayectoria sera curva. Las coor<strong>de</strong>nadas robot se utilizan para ejecutar movimientos rapidos.3) Coor<strong>de</strong>nadas Rectan ulares Modificadas: Los seis ejes <strong>de</strong>l robot tienen los Ilamados"puntos singulares" en su area <strong>de</strong> trabajo. Un punto singular es un punto en el que dos o masejes <strong>de</strong>l robot estan paralelos. Se utiliza este modo <strong>de</strong> coor<strong>de</strong>nadas pam evitar el puntosingular cuando el robot <strong>de</strong>be realizar movimientos muy gran<strong>de</strong>s <strong>de</strong>ntro o cerca <strong>de</strong> puntossingulares que fuerzan el robot a <strong>de</strong>tenerse por razones <strong>de</strong> seguridad. Los ejes <strong>de</strong> la muneca7
(ejes 4,.5 y 6) se mueven a una velocidad constante en coor<strong>de</strong>nadas robot <strong>de</strong>s<strong>de</strong> el punto <strong>de</strong><strong>arranque</strong> al punto final, eso signif ca que la orientacion no se mantendra constante durante elmovimiento.Se observa que al pasar <strong>de</strong>l sistema <strong>de</strong> coor<strong>de</strong>nadas robot al sistema <strong>de</strong> coor<strong>de</strong>nadasrectangulares, el TCP <strong>de</strong>l robot se <strong>de</strong>tiene mientras coordina los ejes. Esta pausa no ocurre enla operacion inversa.2.3.3. Sistemas <strong>de</strong> coor<strong>de</strong>nadas para movimientos manualesExisten tres sistemas <strong>de</strong> coor<strong>de</strong>nadas para <strong>de</strong>finir los movimientos manuales <strong>de</strong>l robot.Estos son el sistema <strong>de</strong> coor<strong>de</strong>nadas en la base, el sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong> la herramienta yel sistema <strong>de</strong> coor<strong>de</strong>nadas robot <strong>de</strong> acuerdo con la figura siguiente.Figura 4. Sistemas <strong>de</strong> coor<strong>de</strong>nadas utilizados para movimentos manuales.El sistema <strong>de</strong> coor<strong>de</strong>nadas manual como se ve en la figura 4 sirve para <strong>de</strong>finir laherramienta y el sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong> la herramienta. El sistema <strong>de</strong> coor<strong>de</strong>nadas manualesta siempre fijo a la brida <strong>de</strong> montaje <strong>de</strong>l robot, teniendo el origen en el centro <strong>de</strong> la brida.8
El sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong> la herramienta toma su origen en el TCP y se <strong>de</strong>finerespecto al, sistema <strong>de</strong> coor<strong>de</strong>nadas manual <strong>de</strong>l robot, y sirve para <strong>de</strong>finir posiciones objetivoo finales <strong>de</strong>l robot, y <strong>de</strong> esta forma el sistema <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong> la herramienta se moverspara coincidir son el sistema <strong>de</strong> coor<strong>de</strong>nadas final mostrado en la figura 3.2.4 Sistema <strong>de</strong> control2.4.1. Programacion y comunicacionEl sistema <strong>de</strong> control S3, utiliza caracteristicas ya establecidas como pulsadores <strong>de</strong>membrana, joystick y el lenguaje ARLA. Otra caracteristica importante es la capacidad <strong>de</strong>intercomunicacion. El control S3 pue<strong>de</strong> comunicarse con diferentes formas. Medianteentradas/salidas digitales o analogicas, comunicaciones serie con un controlador superior ycapacidad, asimismo, para controlar hasta 6 ejes.2.4.2. Caracteristicas <strong>de</strong>l sistema <strong>de</strong> control1) Tensions <strong>de</strong> alimentacion: El sistema <strong>de</strong>l robot sin transformador principal, requiereuna alimentacion <strong>de</strong> 380 V, CA trifasica, incluyendo cable neutro.2) Frecuencia <strong>de</strong> alimentacion: El sistema pue<strong>de</strong> ser alimentado con frecuencia <strong>de</strong> 50 o60 Hz. La adaptacion a la frecuencia se realiza moviendo un puente en la unidad <strong>de</strong>alimentacion.3) Capacidad <strong>de</strong> entrnclnsIsalidas: La maxima cantidad <strong>de</strong> unida<strong>de</strong>s <strong>de</strong> E/S instalable es4, <strong>de</strong> las cuales se <strong>de</strong>stacan:# E/S digitales, 16 entradas y 16 salidas, maximo 4 unida<strong>de</strong>s.* E/S analogicas, 6 entradas y 4 salidas, maximo I unidad.El sistema dispone <strong>de</strong> 8 posiciones para cartas <strong>de</strong> entradas/salidas. Cada una <strong>de</strong> ellasdispone <strong>de</strong> 16 entradas divididas en dos grupos <strong>de</strong> 8, y 16 salidas divididas tambien en dosgrupos <strong>de</strong> 8. El suministro <strong>de</strong> tension para los grupos <strong>de</strong>be ser <strong>de</strong> 24 V. Los grupos estanaislados galvanicamente y la tension <strong>de</strong> alimentacion <strong>de</strong> los mismos pue<strong>de</strong> ser <strong>de</strong> origendistinto, siempre que el potencial relativo a la tierra <strong>de</strong>l sistema no sea <strong>de</strong>masiado elevado. Lafuente <strong>de</strong> alimentacion <strong>de</strong> los dos grupos pue<strong>de</strong> ser los 24 V <strong>de</strong> E/S <strong>de</strong>l propio armario <strong>de</strong>control.9
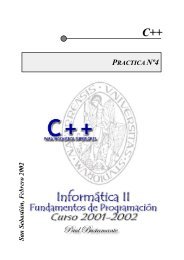
4) Conexion <strong>de</strong> senales: Las senales hacia el armario <strong>de</strong> control son <strong>de</strong> cuatro tipos:• Suministro <strong>de</strong> potencia - tension para los motores electricos.• Senales <strong>de</strong> control - senales digitales <strong>de</strong> operacion y datos. (E/S digitales, parada <strong>de</strong>emergencia, parada <strong>de</strong> trabajo, etc.).• Senales <strong>de</strong> medida - senales analogicas <strong>de</strong> medida y <strong>de</strong> control (resolver, E/Sanalogicas).• Senales <strong>de</strong> conmutacion <strong>de</strong> datos - (impresora, conexion a or<strong>de</strong>nador, etc.).2.4.3. Distribucion y localizacion <strong>de</strong> las unida<strong>de</strong>sEl equipo <strong>de</strong> control esta formado por un armario con sus componentes al que a<strong>de</strong>mas sepue<strong>de</strong>n conectar las unida<strong>de</strong>s externas, robot, ejes externos, perifericos, etc..El armario <strong>de</strong> control esta compuesto por unida<strong>de</strong>s, fabricadas y comprobadasindividualmente y montadas <strong>de</strong>spues en el armario para formar el sistema completo. Estasunida<strong>de</strong>s son:• Unidad electronica (ventiladores, rectificadora, tarjetas electronicas).• Unidad <strong>de</strong> potencia.• Panel <strong>de</strong> control-• Unidad <strong>de</strong> programacion.• Unidad <strong>de</strong> conectores.• Transformador.La figura siguiente muestra la localizacion <strong>de</strong> las distintas unida<strong>de</strong>s en el armario <strong>de</strong>control.1 0
Figura 5. Armario <strong>de</strong> control con sus principales componentes.11
2.5 Especificacion tecnica2.5.1 FuncionamientoEn la Tabla 1 se muestran las limitaciones <strong>de</strong>l movimiento <strong>de</strong> los ejes <strong>de</strong>l robot y susvelocida<strong>de</strong>s maximas.TWO DE MOVIMIENTO AREA DE TRABAJO VELOCIDAD MAXIMAEje 1: Mov. <strong>de</strong> rotacion +180° -180° 15°/segEje 2: Mov. <strong>de</strong> brazo +100° .. -110° 115°/segEje 3: Mov. <strong>de</strong> brazo +60° -60° 115'/sea,Eje 4: Mov.<strong>de</strong> muneca +200° .. -200° 280°/segEje 5: Mov. <strong>de</strong> cabeceo +120 -120° 300°/segEje 6: Mov. <strong>de</strong> giro +200 .. -200° 300°/segTabla 1 Alcance <strong>de</strong> los ejes <strong>de</strong>l robot.2.5.2 Capacidad <strong>de</strong> cargaEl <strong>IRB</strong> <strong>2000</strong> manipula cargas en una amplia area <strong>de</strong> trabajo, con gran rapi<strong>de</strong>z yprecision. Su diseno permite la instalacion <strong>de</strong>l robot, indistintamente, sobre el suelo ocolgado, en posicion invierta. Este robot es particularmente a<strong>de</strong>cuado para soldadura al arco,aplicacion <strong>de</strong> adhesivos y manipulacion <strong>de</strong> materiales, por su velocidad, amplia area <strong>de</strong>trabajo y la flexibilidad inherente en el diseno <strong>de</strong> sus 6 ejes.La carga maxima admisible es <strong>de</strong> 10 Kg y <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la distancia al centro <strong>de</strong> la munecay pue<strong>de</strong> leerse en el diagrama <strong>de</strong> carga mostrado en la figura 6.1 2
Figura 6. Diagrama <strong>de</strong> carga admisibhMovimiento incremental: 0.1 mm aproximadamente.Precision <strong>de</strong> repetibilidad < ± 0.1 mm.2.5.3 Capacidad <strong>de</strong> programacion1. Capacidad <strong>de</strong> programas:Programa principal (numero 0) 1Sub-programas (numero a <strong>de</strong>finir) 1-99992. Memoria para el usuario:CapacidadTiempo <strong>de</strong> <strong>de</strong>scarga baterias <strong>de</strong>alimentacion <strong>de</strong> la memoria RAMDuracion <strong>de</strong> la bateriaTiempo <strong>de</strong> <strong>de</strong>scarga <strong>de</strong> bateria3. Posicion TCP/TCL32 palabras (64 Kbyte)min 1000 horas4 anos24 horas1 3
Cantidad Fijas 1Definidas 19Rango <strong>de</strong> <strong>de</strong>finicion(<strong>de</strong>s<strong>de</strong> brida <strong>de</strong> acoplamiento)0-1500 mm4. Registros <strong>de</strong> posicionCantidad 96 (N° 0-95)5. Registros numericosCantidad 120 (N° 0-119)Valores admisibles0 + 32767 (16 bits)2.5.4. Capacidad <strong>de</strong> interconexion1. Conexiones externas <strong>de</strong> F./SDigitalesAnalogicas0-64 entradas / 0-64 salidas0-4 entradas / 0-4 salidas2. Conexiones <strong>de</strong> usuario en el brazo <strong>de</strong>l robotSeiiales (parte posterior o frontal) 20/24 50 V, 250 mAPotencia 6 250 V, 2 APuesta a tierra 12.5.5. Comunicacion hombre-maquina1. Metodo <strong>de</strong> programacion:Punto a punto, mediante• dialogo interactivo• movimiento manual con joyestick• off-line, a traves <strong>de</strong> terminal2. Numero <strong>de</strong> menus: 6 menus estandar3. Facilida<strong>de</strong>s para el dialogo:Mensajes <strong>de</strong>s<strong>de</strong> el sistemalenguaje normalEleccion <strong>de</strong> lenguaje para mensajes Ingles + 3x3 seleccionablesDisplay en la unidad <strong>de</strong> programacion Alfanumericos. 2 filasNumero <strong>de</strong> caracteres por fila 40Facilida<strong>de</strong>s para entradas <strong>de</strong> datos Pulsadores <strong>de</strong> membrananumericos + 5 multifuncional1 4
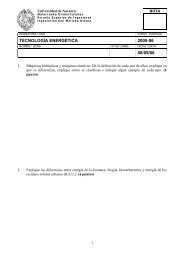
2.5.6 Campo <strong>de</strong> accionEl conjunto <strong>de</strong> puntos en el espacio que pue<strong>de</strong>n ser alcanzados por el extremo <strong>de</strong> lamufeca <strong>de</strong>l robot constituyen su campo <strong>de</strong> accion. Queda limitado por los <strong>de</strong>splazamientoslineales o angulares maximos que permitan las articulaciones y la longitud <strong>de</strong> los brazos. Elconvenio <strong>de</strong> utilizar el extremo <strong>de</strong> la mufeca para <strong>de</strong>finir el campo <strong>de</strong> trabajo <strong>de</strong>l robot seadopta para evitar la complicac16n <strong>de</strong> diferentes tamafos <strong>de</strong> efectores finales, que podrianunirse a la mufeca <strong>de</strong>l robot. En la figura siguiente se muestra el area <strong>de</strong> trabajo <strong>de</strong>l robot.Figura 7. Area <strong>de</strong> trabajo <strong>de</strong>l robot <strong>ASEA</strong><strong>2000</strong>.1 5
3 PROGRAMACION DEL ROBOT3.1 Panel <strong>de</strong>control1 6
1 Preparado (Stanbay): No hay tension aplicada a los motores <strong>de</strong>l robot. La lamparatestigo situada encima <strong>de</strong>l pulsador se encien<strong>de</strong>.2 Funcionamiento (Run): Hay tension en los motores <strong>de</strong>l robot y pue<strong>de</strong> moverseaccionando la palanca <strong>de</strong> mando y se pue<strong>de</strong> ejecutar un programa.3 Sincronizacion: La lampara parpa<strong>de</strong>a indicando que el robot no esta sincronizado.Cuando se pulsa el pulsador, empieza la sincronilacion y la lampara se encien<strong>de</strong> <strong>de</strong> formacontinua.4 Arranque programa: Inicia la ejecucion <strong>de</strong> un programa si la unidad <strong>de</strong>programacion esta en su sitio.5 Paro: Interrumpe la sincronizac16n iniciada, la ejecucion <strong>de</strong>l programa y la lectura <strong>de</strong>un disquete.6 Paro <strong>de</strong> emergencia: Provoca un paro inmediato <strong>de</strong>l robot.7 Indicador <strong>de</strong>l paro <strong>de</strong> emergencia: Lampara testigo se encien<strong>de</strong> (rojo) cuando elparo <strong>de</strong> emergencia esta activo.8 Reinicializacion (Reset): Reinicializa el sistema <strong>de</strong>spues <strong>de</strong> un paro <strong>de</strong> emergencia.9 Bloqueo <strong>de</strong>l programs: Cuando el cierre esta pulsado, los pulsadores <strong>de</strong> la unidad <strong>de</strong>programacion quedan <strong>de</strong>sactivos impidiendo asi la entrada <strong>de</strong> programas.10 Indicador <strong>de</strong> errores: La lampara testigo se encien<strong>de</strong> (rojo) cuando ha ocurrido unfallo durante la ejecucion <strong>de</strong>l programa, y tambien en el caso <strong>de</strong> la manipulacion manualfuera <strong>de</strong>l area <strong>de</strong> trabajo.11 Prueba <strong>de</strong> lamparas: Cuando se aprieta este pulsador, se encien<strong>de</strong>n todas laslamparas <strong>de</strong>l panel <strong>de</strong> control.12 Del disco flexible: Al apretar este pulsador dos veces se inicia la transferencia <strong>de</strong>lbloque programa <strong>de</strong>l disco flexible a la memoria <strong>de</strong>l robot (la lampara parpa<strong>de</strong>a tras pulsaruna vez. A la segunda presion empieza la carga). La unidad <strong>de</strong> programacion podra usarsetambien para cargar programas a partir <strong>de</strong> un disquete a la memoria <strong>de</strong>l robot.1 7
3.2 Unidad <strong>de</strong> programacion1 8
3.3 Palanca <strong>de</strong> mandoLa palanca <strong>de</strong> mando <strong>de</strong> unidad <strong>de</strong> programacion se utiliza para posicionar, bajo controlmanual, el robot mientras se esta programando. Pue<strong>de</strong> moverse hacia a<strong>de</strong>lante, hacia atras,hacia ambos lados, en el sentido horario y antihorario o una combinacion <strong>de</strong> estos.La velocidad <strong>de</strong>l movimiento correspondiente en el robot sera proporcional a la <strong>de</strong>flexion<strong>de</strong> la palanca <strong>de</strong> mando.El pulsador superior sirve para el control <strong>de</strong> los ejes <strong>de</strong>l robot para el control <strong>de</strong> los ejesexternos. Las funciones <strong>de</strong>l pulsador inferior <strong>de</strong>pen<strong>de</strong>ran <strong>de</strong> la posicion <strong>de</strong>l conmutadorsuperior, segun lo siguiente:• Si se ha seleccionado el control <strong>de</strong> los ejes <strong>de</strong>l robot, la funcion 1 provocaramovimientos <strong>de</strong> los ejes 1 - 3.• Si se selecciona la funcion 2, se podra mover los ejes 4 - 6.1 9
3.4 Programacion <strong>de</strong> posicionesLos siguientes principios se aplican a la programacion <strong>de</strong> posiciones:• Se mueve el robot (el TCP), mediante la palanca <strong>de</strong> mando, a la posicion en que<strong>de</strong>bera pasar cuando se ejecute el programa.• Pulsar POS para almacenar la posicion <strong>de</strong>l TCP y la orientacion <strong>de</strong> la muflecaexpresada en el sistema base <strong>de</strong> coor<strong>de</strong>nadas global.3.4.1 Configuracion <strong>de</strong>l robotLa orientacion y posicion <strong>de</strong> la herramienta, <strong>de</strong>beran po<strong>de</strong>r alcanzarse con diferentesconfiguraciones <strong>de</strong>l brazo <strong>de</strong>l robot. Para estar seguro <strong>de</strong> que la posicion programada seejecuta en el modo automatico con la misma configuracion <strong>de</strong> brazo <strong>de</strong>l robot que cuando seprogramo, el movimiento <strong>de</strong>bera realizarse en coor<strong>de</strong>nadas robot o en coor<strong>de</strong>nadasRECTMOD.3.5 Velocidad <strong>de</strong> movimientoDurante la ejecucion <strong>de</strong>l programa, la velocidad <strong>de</strong> movimiento <strong>de</strong>pen<strong>de</strong> <strong>de</strong> lasvelocida<strong>de</strong>s basica y maxima, programadas en la instrucc16n <strong>de</strong> velocidad y el porcentaje <strong>de</strong>velocidad especificado en cada instruccion <strong>de</strong> posicionamiento. La velocidad basicaprogramada es <strong>de</strong> 1000 mm/s, y la maxima es <strong>de</strong> 2500 mm/s.La velocidad <strong>de</strong> posicionamiento estara afectada por la correccion <strong>de</strong> velocidad mediantelos pulsadores (+%) y (-%) que se usan unicamente para comprobar las diferentesvelocida<strong>de</strong>s.Cuando se extrae la unidad <strong>de</strong> programacion <strong>de</strong> su compartimiento se admitiranvelocida<strong>de</strong>s que no sobrepasen el 25% <strong>de</strong> la velocidad maxima y que no excedan 250 mm/spara reducir el riesgo <strong>de</strong>l operador.3.6 Optimizacion <strong>de</strong> la velocidadla optimizacion <strong>de</strong> la velocidad se activa con la ayuda <strong>de</strong> un parametro <strong>de</strong> funcion bajoMANUAL / PARAM / CAMBIAR / AUTO / TRAYECT.Las zonas utilizadas en los puntos tienen distintas aplicaciones y valores, <strong>de</strong>pendiendo <strong>de</strong>que principio <strong>de</strong> optimizacion se usa: la optimizacion <strong>de</strong> la velocidad o <strong>de</strong> la trayectoria. La20
optimizacion <strong>de</strong> la trayectoria utiliza una zona esquina, mostrando a que distancia <strong>de</strong> un puntoel sistema <strong>de</strong> control <strong>de</strong>be empezar a generar una trayectoria parabolica. La optimizacion <strong>de</strong>la velocidad utiliza una zona cero, mostrando al servo sistema la proximidad a la que <strong>de</strong>benestar los ejes respecto al punto antes <strong>de</strong> dirigirse al siguiente. Los tipos <strong>de</strong> zonas se <strong>de</strong>finencon MANUAL / PARAM / CAMBIAR / AUTO / ZONA.Si se selecciona la optimizacion <strong>de</strong> la trayectoria, las zonas esquina seranautomaticamente creadas e instaladas y si se selecciona la optimizacion <strong>de</strong> la velocidad, secrearan las zonas cero. Por <strong>de</strong>fecto se utiliza la optimizacion <strong>de</strong> la trayectoria con los textosFINA, CAMINO, ESQUINA 1, ESQUINA 2.3.7 Puntos singularesLos puntos singulares son puntos situados en el area <strong>de</strong> trabajo <strong>de</strong>l robot don<strong>de</strong> coinci<strong>de</strong>nlos ejes <strong>de</strong> rotacion <strong>de</strong> dos ejes robot. Cuando el robot funciona en coor<strong>de</strong>nadas rectangulares,esto provocarai movimientos muy gran<strong>de</strong>s <strong>de</strong> los motores para mantenerse en la trayectoria ypue<strong>de</strong> ocurrir que el robot sea <strong>de</strong>tenido por razones <strong>de</strong> seguridad.En el modo automatico, el paso por un punto singular pue<strong>de</strong> provocar la <strong>de</strong>sviacion <strong>de</strong> latrayectoria programada para reducir la velocidad o para pasar al paro <strong>de</strong> emergencia. Paraevitar este problema se <strong>de</strong>beran seguir las siguientes instrucciones:COORD RECTMOD : entrar el sistema <strong>de</strong> coor<strong>de</strong>nadas rectangulares modificadas antes<strong>de</strong> la instruccion <strong>de</strong> posicionamiento en la que el fallo se ha ocurrido (COORD RECTMOD),lo cual significa que la linealidad y la velocidad seran preservadas pero la orientacion <strong>de</strong> lamuneca pue<strong>de</strong> cambiar a to largo <strong>de</strong> la trayectoria.COORD RECT : regresar al sistema <strong>de</strong> coor<strong>de</strong>nadas rectangulares <strong>de</strong>spues <strong>de</strong> lainstruccion <strong>de</strong> posicionamiento.3.8 Seguimiento <strong>de</strong> la trayectoriaCon el metodo SPF (servo path following) se obtiene una precision optima <strong>de</strong> latrayectoria cuando se utiliza el sistema <strong>de</strong> coor<strong>de</strong>nadas rectangulares y una velocidad <strong>de</strong> TCPmaxima en las coor<strong>de</strong>nadas robot. la funcion SPF reduce la velocidad <strong>de</strong>l TCP en lasesquinas.2 1
3.8.1 PrincipiosEl sistema servo controlado mantiene el TCP <strong>de</strong>l robot junto a una recta entre dosposiciones programadas y compensa ei momento <strong>de</strong>l cambio <strong>de</strong> inercia, gravedad y engeneral, la dinamica <strong>de</strong>l robot sin oscilaciones.La trayectoria <strong>de</strong> la esquina se inicia a una distancia <strong>de</strong>finida a partir <strong>de</strong> la posicionprogramada. Esta distancia se llama zona <strong>de</strong> esquina.Si la velocidad <strong>de</strong>l TCP es <strong>de</strong>masiado elevada como para seguir la trayectoria <strong>de</strong> laesquina, la velocidad sera reducida a un valor a<strong>de</strong>cuado. Una cierta disminucion <strong>de</strong> lavelocidad tends lugar tambien <strong>de</strong>ntro <strong>de</strong> la zona <strong>de</strong> esquina.3.8.2 ZonasLa zona es la distancia que va <strong>de</strong>s<strong>de</strong> la posicion programada al punto en que el TCP <strong>de</strong>lrobot <strong>de</strong>ja la trayectoria en linea recta. El tamaiio <strong>de</strong> la zona se <strong>de</strong>fine en mm, o en pulgadas,pero el valor sera unicamente aplicable cuando se utilizan coor<strong>de</strong>nadas rectangulares. Si seutilizan coore<strong>de</strong>nadas robot, el tamano <strong>de</strong> la zona pue<strong>de</strong> diferir ligeramente <strong>de</strong>l programado ysuele ser por lo general algo mas pequeno que el tamano <strong>de</strong>fmido en mm.La zona tiene un tamano absoluto cuando tiene un valor positivo. Si el valor es negativo,la zona es consi<strong>de</strong>rada como <strong>de</strong>pendiente <strong>de</strong> la velocidad, por ejemplo, en coor<strong>de</strong>nadasrectangulares y con un valor <strong>de</strong> zona <strong>de</strong> 25 mm, el tamano <strong>de</strong> la zona a 100 mm/s sera <strong>de</strong> 2.5mm.El tamano <strong>de</strong> la zona <strong>de</strong>pendiente <strong>de</strong> la velocidad es proporcional a la velocidadprogramada VELOC y al porcentaje <strong>de</strong> la velocidad W/o. No se ve afectado por lospulsadores (-%) (+%) <strong>de</strong> la unidad <strong>de</strong> programacion.22
3.8.3 Velocidad a to largo <strong>de</strong> la trayectoriaSi la velocidad <strong>de</strong>l TCP <strong>de</strong>l robot es <strong>de</strong>masiado alta como para permitir tomar la curva,en el momento <strong>de</strong> la entrada en la zona, la velocidad se reduce automaticamente a lavelocidad maxima permitida para realizar la trayectoria programada sin oscilacion. Lavelocidad maxima sera funcion <strong>de</strong>l tamano <strong>de</strong> la zona y <strong>de</strong>l angulo que se <strong>de</strong>be realizar.La velocidad maxima aproximada <strong>de</strong> entrada en mm/s se muestra en la tabla siguiente enfuncian <strong>de</strong>l tamano <strong>de</strong> la zona y el angulo a realizar.Angulo a realizarTamaiio zona (mm)0 0 45° 90° 135° 180°1 40 40 20 15 152 80 80 40 30 305 200 200 100 70 7015 600 600 300 200 20025 1000 1000 500 350 35050 2100 1000 700 500 400100 2500 2100 800 700 6003.8.4 Velocidad a to largo <strong>de</strong> la curvaSe optimiza la aceleracion <strong>de</strong> <strong>de</strong>celeracion <strong>de</strong> los ejes en la curvas generadas. De elloresulta una reduccion suave a lo largo <strong>de</strong> la curva a un valor minimo.23
La velocidad minima es proporcional a la velocidad <strong>de</strong> entrada y sera funcion <strong>de</strong>l anguloque se <strong>de</strong>be realizar, como se muestra en la tabla siguiente:Angulo a realizar Velocidad minima = %VELOC0 0 100%45 0 90%90° 70%135° 40%180° 0%3.8.5 Redon<strong>de</strong>amiento <strong>de</strong> las esquinasLa <strong>de</strong>sviacion a partir <strong>de</strong>l punto <strong>de</strong> la esquina es funcion <strong>de</strong>l tamano <strong>de</strong> la zona y <strong>de</strong>langulo a realizar. Si la zona ha sido <strong>de</strong>finida como <strong>de</strong>pendiente <strong>de</strong> la velocidad, la <strong>de</strong>sviacionsera tambien proporcional a la velocidad programada.La <strong>de</strong>sviacion d (mm) viene dada para la zona absoluta en la tabla siguiente:Angulo a realizarTamano zona (mm) 0 0 45° 90° 135° 180 01 0 0.2 0.4 0.5 0.52 0 0.4 0.7 0.9 15 0 1 1.8 2.3 2.515 0 3 5.5 7 7.525 0 5 9 11.5 12.550 0 10 18 23 25100 0 19 36 46 5024
3.9 Programacion <strong>de</strong> circulosLa orientacion <strong>de</strong> la herramienta a lo largo <strong>de</strong> la trayectoria se selecciona poniendo elparametro <strong>de</strong>l sistema CIRCLE = 0. La reorientacion <strong>de</strong> la herramienta entre el punto <strong>de</strong><strong>arranque</strong> y el punto final se realizara como una torsion en el sistema <strong>de</strong> coor<strong>de</strong>nadas en labase.Para programar un arco circular en coor<strong>de</strong>nadas rectangulares entre dos posiciones se<strong>de</strong>bera usar un punto <strong>de</strong> circulo para <strong>de</strong>finir el circulo. Un arco <strong>de</strong> hasta 180 grados podraobtenerse a partir <strong>de</strong> tres puntos. Se obtiene un arco mayor construyendo un segundo arco<strong>de</strong>spues <strong>de</strong>l primero.El TCP <strong>de</strong>l robot sigue una trayectoria generada automaticamente a la entrada y a lasalida <strong>de</strong>l circulo. La velocidad a traves <strong>de</strong>l arco circular es constante y la reorientacion <strong>de</strong> lamufieca se extien<strong>de</strong> <strong>de</strong> forma regular a traves <strong>de</strong>l arco circular. La reorientacion <strong>de</strong> laherramienta se realiza como una torsion en el sistema <strong>de</strong> coor<strong>de</strong>nadas en la base, sin tener encuenta la orientacion <strong>de</strong> la trayectoria. La maxima velocidad alcanzable <strong>de</strong>pen<strong>de</strong> <strong>de</strong>l diametro<strong>de</strong>l circulo. Tambien pue<strong>de</strong> estar limitada por un gran reorientacion <strong>de</strong> la muneca.La velocidad maxima alcanzable en una trayectoria circular se muestra en la tablasiguiente:2 5
Radio <strong>de</strong>l circulo (mm) Velocidad maxima (mm/s)2_5 905 13012 22025 30050 450100 650200 900400 12003.10 ExcepcionesNo se genera ninguna trayectoria <strong>de</strong> esquina <strong>de</strong>spues <strong>de</strong> las siguientes instrucciones yfunciones:• Despues <strong>de</strong> una instruccion TCP.• En una posicion FINO.• Despues <strong>de</strong> un paro <strong>de</strong> BUSQUEDA_• Entre dos segmentos <strong>de</strong> circulo.• En ARRANQUE <strong>de</strong> PROGRAMA <strong>de</strong>spues <strong>de</strong> un paro <strong>de</strong> prograrna <strong>de</strong>ntro <strong>de</strong> unazona.• En ARRANQUE <strong>de</strong> INSTRUCCION.• En instruccion ATRAS.• En OSCILACION.• En el control manual con la palanca <strong>de</strong> mando.3.11 TCP fijoCuando se ejecuta un programa, la pieza se movers o bien en una linea recta o bien en uncirculo, al pasar por el punto <strong>de</strong> la herramienta fijo. La velocidad <strong>de</strong> la pieza <strong>de</strong> trabajo,respecto al punto fijo es la velocidad programada.26
3.11.1 Movimiento <strong>de</strong>l robot mediante la palanca <strong>de</strong> mandoEl robot se mueve normalmente en las coor<strong>de</strong>nadas en la base, en la muneca y en lascoor<strong>de</strong>nadas robot cuando se utilice para su ejecucion la palanca <strong>de</strong> mando y siempre ycuando haya un TCP activo. La diferencia surge cuando se realiza la reorientacion <strong>de</strong> lamufieca, entonces la pieta <strong>de</strong> trabajo girara y se movers respecto e un punto <strong>de</strong> trabajo fijo,in<strong>de</strong>pendientemente <strong>de</strong> la posicion <strong>de</strong>l robot.3.11.2 Ejecuciun <strong>de</strong>l programs con TCP fijoCuando se ejecuta, la pieza <strong>de</strong> trabajo se va a mover en linea recta o bien en un circulo alpasar por el punto <strong>de</strong> la herramienta fijo. La trayectoria o la velocidad no se veran afectadaspor la reorientacion <strong>de</strong> la pieza durante el movimiento, al pasar por el punto <strong>de</strong> trabajo.27
Interpolacion lineal para un TCP fijoInterpolacion circular para un TCP fijo28
3.11.3 LimitacionesPUNTO BASE : la <strong>de</strong>finicion <strong>de</strong> puntos base no es posible para un TCP fijo. Apareceraun mensaje <strong>de</strong> error si se intenta hacer algun intento.PUNTO DE REF : El punto <strong>de</strong> referencia funciona cuando un TCP fijo esta activado. Elpunto <strong>de</strong> referencia no hace mover el TCP fijo, sino que es el punto <strong>de</strong> trabajo en la pieta <strong>de</strong>trabajo que se ha movido. El punto <strong>de</strong> referencia <strong>de</strong>bera ser <strong>de</strong>sactivado antes <strong>de</strong> realizar uncambio entre un TCP normal y un TCP fijo.BAS COORD : La <strong>de</strong>finicion manual y automatica <strong>de</strong> la base <strong>de</strong> coor<strong>de</strong>nadas no pue<strong>de</strong>realizarse con un TCP fijo y activo. Se podra utilizar una base <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong>finidaanteriormente. La base <strong>de</strong> coor<strong>de</strong>nadas mueve el TCP fijo y cambia la orientacion <strong>de</strong> la pieta<strong>de</strong> trabajo <strong>de</strong> la misma forma que para una posicion normal.ESPEJO : La funcion es interrumpida con un mensaje <strong>de</strong> error si se programa unaposicion con un TCP fijo.OSCILACION : LA oscilacion queda bloqueada para la programacion y para laejecucion programada si hay un TCP fijo activado.POS MOD : La funcion POS MOD funciona normalmente cuando el TCP fijo estdactivado, pero si la instruccion POS correspondiente es creada con un TCP normal, Lafuncion queda bloqueada.HERR REL : La funcion queda bloqueada para la programacion y la ejecucion si hay unTCP fijo en el espacio activado.29
4 OPERAciON4.1 Puesta en marcha, sincronizacion y apagado <strong>de</strong>l sistemaPara poner en marcha el sistema se bebera seguir las siguientes instrucciones:1. Antes <strong>de</strong> arrancar el sistema, asegurar que no hay obstaculos en el area <strong>de</strong> trabajo <strong>de</strong>lrobot y que no hay nadie en la zona <strong>de</strong> peligro.2. Insertar la unidad <strong>de</strong> programacion en su compartimiento en el armario <strong>de</strong> control.3. Activar el interruptor principal.4. Desactivar el estado <strong>de</strong> emegencia pulsando el boton n° 8 (RESET) en el panel <strong>de</strong>control.5. Pulsar el pulsador <strong>de</strong> funcionamiento n° 2 (RUN) en el panel <strong>de</strong> control.6. La lampara testigo <strong>de</strong> la sincronizacion empezara a parpa<strong>de</strong>ar, indicando que el robotno esta sincronizado. Pulsar el pulsador <strong>de</strong> sincronizacion n° 3. La lampara situadaencima <strong>de</strong>l pulsador se queda encendida hasta finalizar la sincronizacion.7. Aparece la palabra "listo" en la unidad <strong>de</strong> programacion, y a partir <strong>de</strong> este momento sepue<strong>de</strong> manejar el robot manualmente y realizar la programacion, la comunicacion offliney la ejecucion <strong>de</strong> programas en funcionamiento automatico.8. Para apagar el sistema seguimos los pasos siguientes:a) Detener cualquier ejecucion <strong>de</strong>l programa en progreso.b) Pulsar el pulsador STANBAY (PREPARADO) n° 1 en el panel <strong>de</strong> control.c) Poner el interruptor principal en posicion "off".La memoria <strong>de</strong>l robot funciona con un sistema <strong>de</strong> baterias con lo cual ei apagado <strong>de</strong>lsisterna no afecta a la memoria.3 0
4.2 FuncionamientoSe comproban los programas en modo STANBAY. El robot se mueve a las posicionesprogramadas cuando los programas son ejecutadas en el modo RUN. Las instrucciones <strong>de</strong>posicionamiento pue<strong>de</strong>n ejecutarse <strong>de</strong> las siguientes maneras:• Instruccion por instruccion hacia a<strong>de</strong>lante.• De forma continua hacia a<strong>de</strong>lante.• Instruccion por instruccion hacia atras.Cuando se ejecuta un movimiento programado, el robot se mueve siempre directamentehacia la posicion programada in<strong>de</strong>pendientemente <strong>de</strong> don<strong>de</strong> ha empezado el movimiento.Las funciones <strong>de</strong> seguridad incorporadas aseguran que:• Cuando la unidad <strong>de</strong> programacion esta extraida, no se pue<strong>de</strong> arrancar un programa apartir <strong>de</strong>l panel <strong>de</strong> control.• Con la unidad <strong>de</strong> programacion extraida <strong>de</strong> su compartimiento, los programas sonejecutados al 25% <strong>de</strong> la velocidad programada pero con una velocidad maxima <strong>de</strong> 250mm/s.• La palanca <strong>de</strong> seguridad <strong>de</strong>be estar pulsada para po<strong>de</strong>r mover el robot y ejecutarprogramas cuando la unidad <strong>de</strong> programacion esta extraida <strong>de</strong> su compartimiento.• Si la conexion <strong>de</strong> paro <strong>de</strong> trabajo <strong>de</strong>l usuario esta interrumpida, el robot se <strong>de</strong>tiene.4.3 ParoPara volver a arrancar se <strong>de</strong>be realizar la conexion y pulsar el pulsador RUN o bienpulsar temporalmente la palanca <strong>de</strong> seguridad en la unidad <strong>de</strong> programacion. Cuandose suelta la palanca el sistema regresa al modo STANBAY.Se pue<strong>de</strong> <strong>de</strong>tener manualmente la ejecucion <strong>de</strong> un programa con los pulsadores <strong>de</strong> PAROsituados en el panel <strong>de</strong> control y la unidad <strong>de</strong> programacion o automaticamente, utilizandouna entrada para el paro <strong>de</strong> programa o utilizando la funcion paro <strong>de</strong>l robot con comentariocomo una instruccion en el programa.Cuando se usa la unidad <strong>de</strong> programacion, si se <strong>de</strong>sea obtener un paro normal se <strong>de</strong>berautilizar el pulsador STOP PROG. Si se utiliza la palanca <strong>de</strong> seguridad como funcion <strong>de</strong> paro,se provocara un frenado mucho mas violento con riesgo <strong>de</strong> disminuir la duracion <strong>de</strong> vida <strong>de</strong>los frenos. Esta funcion esta prevista como medida <strong>de</strong> seguridad.3 1
5 REGISTROSEl control <strong>de</strong>l programs o <strong>de</strong>l equipo periferico se realiza en base a un valor que se encuentraen un registro numerico. El sistema contiene 120 registros numericos (0-119), don<strong>de</strong> se pue<strong>de</strong>almacenar un valor integro a la vez.Durante la ejecuci6n programada, un valor numerico pue<strong>de</strong>:• Ser almacenado directamente.• Ser almacenado indirectamente <strong>de</strong>s<strong>de</strong> una entrada digital o anal6gica.• Ser enviado al equipo periferico <strong>de</strong>s<strong>de</strong> una entrada digital o anal6gica.• Comprobado con otro valor en una instrucci6n <strong>de</strong> salto.• Ser sumado, restado, multiplicado o dividido por otro valor <strong>de</strong> registro.• Ser un:• Ni mero <strong>de</strong> programa en una llamada indirecta <strong>de</strong> un programa.• Nimero <strong>de</strong> registro <strong>de</strong> posici6n al moverse hacia una posici6n almacenada.• Numero <strong>de</strong> bloque a la lectura indirecta <strong>de</strong> un bloque a partir <strong>de</strong> un diskette.• Definir un valor para unaa posici6n <strong>de</strong> robot.• Especif car que modulo <strong>de</strong> un programa <strong>de</strong> trayectoria <strong>de</strong>be ser llamado.• Definir el <strong>de</strong>splazamiento o la rotaci6n <strong>de</strong> una localizaci6n o posici6n <strong>de</strong>finida por una <strong>de</strong>las instrucciones LOC POS, POS POS.• Defmir la posici6n corriente en un pallet.La instrucci6n <strong>de</strong> registro sirve para:• Leer ei valor en un registro numerico directamente o con otros registros.• Acce<strong>de</strong>r a un valor <strong>de</strong>s<strong>de</strong> una puerta.• Transmitir un valor <strong>de</strong>s<strong>de</strong> un registro a una puerta.• Manipulaci6n aritmetica <strong>de</strong> un valor <strong>de</strong> registro.• Entrada <strong>de</strong> una localizaci6n <strong>de</strong> TCP.32
6 MENUS PARA LA PROGRAMACION ON-LINE6.1 Instrucciones Iogicas33
6.2 Instrucciones <strong>de</strong> posicionamiento3 4
6.3 Modo automatico35
6.4 Funciones <strong>de</strong> edicion36
6.5 Funcionamiento manual37
7 Listado <strong>de</strong> un programaEl programa siguiente realiza la extraccion <strong>de</strong> la herramienta <strong>de</strong>l centro <strong>de</strong> mecanizado, sumanipulacion y su insercion en el palet <strong>de</strong>l carro movil.UNIT = METRICINCLUDE CARAGV3.CRDPROGRAM 999910 V=1000.0 MAX=1500.020 TCP 030 FRAME 040 ROBOT COORD43 RELEASE 1 WAIT 0.5 S50 POS V=50.0% C2 #151 POS V=50.0% STORE POSITION 052 LET R20 = -9953 JUMP TO 56 IF R22 > 0 * R22 < 554 JUMP TO 58 IF R22 > 4 * R22 < 755 JUMP TO 5056 LET R30 = R22 - 157 JUMP TO 5958 LET R30 = R22 - 459 LET R40 = R30 * R2060 LET R25 = R22 - 161 MODRECT COORD65 RESET OUTP 170 POS V=100.0% C2 #280 POS V=50.0% C2 #3100 POS V=5.0% FINEC #4120 POS V=2.0% FINEC #5130 GRIP 1 WAIT 0.6 S150 POS V=5.0% FINEC #6160 POS V=30.0% C2 #7165 POS V=50.0% C2 #8167 SET OUTP 13 8
180 ROBOT COORD190 POS V=50.0% C2 #9200 POS V=100.0% C2 #10210 POS V=100.0% C2 #11220 CALL PROG 3500 R25230 CALL PROG 3100232 ROBOT COORD233 POS V=100.0% C2 #12234 POS V=100.0% C2 #13240 STOPEl fichero <strong>de</strong> coor<strong>de</strong>nadas que correspon<strong>de</strong> a las posiciones <strong>de</strong>l TCP a lo largo <strong>de</strong> laoperacion anterior es el siguiente:POS X Y Z Angulos <strong>de</strong> Euler#1 702.4 1.5 1516.8 ZYX 0.1 -1.4 0.4 1#2 1038.8 38.8 1247.8 ZYX 0.1 -1.4 0.4 65#3 1337.0 63.8 1163.3 ZYX 0.1 -1.4 0.4 65#4 1369.1 42.5 1168.8 ZYX 3.5 -0.0 0.4 1#5 1406.1 42.5 1168.8 ZYX 3.5 -0.0 0.4 1#6 1367.5 42.5 1168.8 ZYX 3.5 -0.0 0.4 1#7 1194.5 65.0 1163.3 ZYX 0.3 -1.2 0.4 65#8 820.9 65.0 1381.1 ZYX 0.3 -1.2 0.4 65#9 676.9 65.0 1434.4 ZYX 0.3 -1.2 0.4 66#10 494.0 -467.3 1434.4 ZYX -48.6 -1.2 0.4 66#11 -532.5 -966.5 1045.9 ZYX -179.7 0.4 178.8 4#12 110.6 -800.8 1491.6 ZYX -82.1 3.3 -0.7 1#13 702.4 1.5 1516.8 ZYX 0.1 -1.4 0.4 653 9