Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
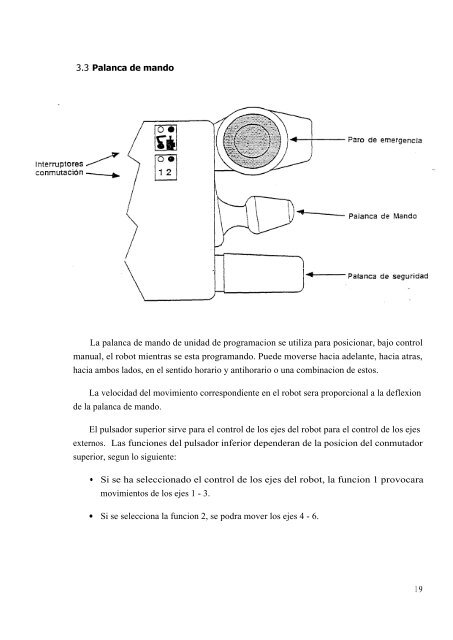
3.3 Palanca <strong>de</strong> mandoLa palanca <strong>de</strong> mando <strong>de</strong> unidad <strong>de</strong> programacion se utiliza para posicionar, bajo controlmanual, el robot mientras se esta programando. Pue<strong>de</strong> moverse hacia a<strong>de</strong>lante, hacia atras,hacia ambos lados, en el sentido horario y antihorario o una combinacion <strong>de</strong> estos.La velocidad <strong>de</strong>l movimiento correspondiente en el robot sera proporcional a la <strong>de</strong>flexion<strong>de</strong> la palanca <strong>de</strong> mando.El pulsador superior sirve para el control <strong>de</strong> los ejes <strong>de</strong>l robot para el control <strong>de</strong> los ejesexternos. Las funciones <strong>de</strong>l pulsador inferior <strong>de</strong>pen<strong>de</strong>ran <strong>de</strong> la posicion <strong>de</strong>l conmutadorsuperior, segun lo siguiente:• Si se ha seleccionado el control <strong>de</strong> los ejes <strong>de</strong>l robot, la funcion 1 provocaramovimientos <strong>de</strong> los ejes 1 - 3.• Si se selecciona la funcion 2, se podra mover los ejes 4 - 6.1 9