Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
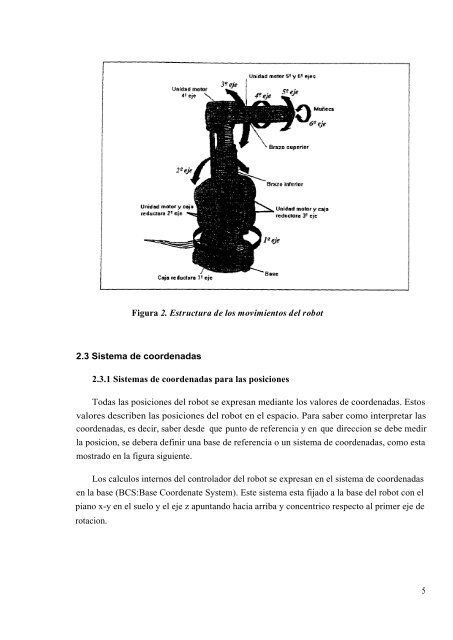
Figura 2. Estructura <strong>de</strong> los movimientos <strong>de</strong>l robot2.3 Sistema <strong>de</strong> coor<strong>de</strong>nadas2.3.1 Sistemas <strong>de</strong> coor<strong>de</strong>nadas para las posicionesTodas las posiciones <strong>de</strong>l robot se expresan mediante los valores <strong>de</strong> coor<strong>de</strong>nadas. Estosvalores <strong>de</strong>scriben las posiciones <strong>de</strong>l robot en el espacio. Para saber como interpretar lascoor<strong>de</strong>nadas, es <strong>de</strong>cir, saber <strong>de</strong>s<strong>de</strong> que punto <strong>de</strong> referencia y en que direccion se <strong>de</strong>be medirla posicion, se <strong>de</strong>bera <strong>de</strong>finir una base <strong>de</strong> referencia o un sistema <strong>de</strong> coor<strong>de</strong>nadas, como estamostrado en la figura siguiente.Los calculos internos <strong>de</strong>l controlador <strong>de</strong>l robot se expresan en el sistema <strong>de</strong> coor<strong>de</strong>nadasen la base (BCS:Base Coor<strong>de</strong>nate System). Este sistema esta fijado a la base <strong>de</strong>l robot con elpiano x-y en el suelo y el eje z apuntando hacia arriba y concentrico respecto al primer eje <strong>de</strong>rotacion.5