Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)
Guia de arranque del ASEA IRB 2000(Pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
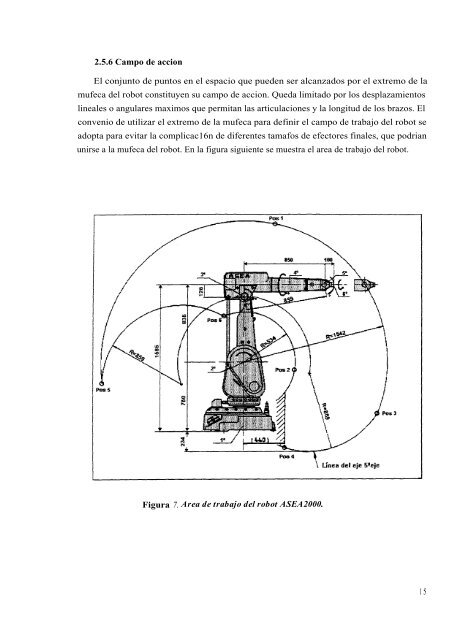
2.5.6 Campo <strong>de</strong> accionEl conjunto <strong>de</strong> puntos en el espacio que pue<strong>de</strong>n ser alcanzados por el extremo <strong>de</strong> lamufeca <strong>de</strong>l robot constituyen su campo <strong>de</strong> accion. Queda limitado por los <strong>de</strong>splazamientoslineales o angulares maximos que permitan las articulaciones y la longitud <strong>de</strong> los brazos. Elconvenio <strong>de</strong> utilizar el extremo <strong>de</strong> la mufeca para <strong>de</strong>finir el campo <strong>de</strong> trabajo <strong>de</strong>l robot seadopta para evitar la complicac16n <strong>de</strong> diferentes tamafos <strong>de</strong> efectores finales, que podrianunirse a la mufeca <strong>de</strong>l robot. En la figura siguiente se muestra el area <strong>de</strong> trabajo <strong>de</strong>l robot.Figura 7. Area <strong>de</strong> trabajo <strong>de</strong>l robot <strong>ASEA</strong><strong>2000</strong>.1 5