- Page 1 and 2:
TASKING VX-toolset for ARMUser Guid
- Page 3 and 4:
Table of Contents1. C Language ....
- Page 5 and 6:
TASKING VX-toolset for ARM User Gui
- Page 7 and 8:
TASKING VX-toolset for ARM User Gui
- Page 9 and 10:
TASKING VX-toolset for ARM User Gui
- Page 11 and 12:
Chapter 1. C LanguageThis chapter d
- Page 13 and 14:
C LanguagePacked structuresTo preve
- Page 15 and 16:
C LanguageSCB->VTOR |= (1
- Page 17 and 18:
C LanguageExample 2: using output p
- Page 19 and 20:
C LanguageExample 5: reserving regi
- Page 21 and 22:
C Languageadd r1,r1,r1,lsl #2mov r0
- Page 23 and 24:
C Language• On return of such a c
- Page 25 and 26:
C Languageotherwise, a pragma is in
- Page 27 and 28:
C Languageinline / noinline / smart
- Page 29 and 30:
C Languagelinear_switch / jump_swit
- Page 31 and 32:
C LanguageMacro__STDC_VERSION____TA
- Page 33 and 34:
C LanguageParameter type_Bool, char
- Page 35 and 36:
C Language1.10.3. Interrupt Functio
- Page 37 and 38:
C Language...}1.10.3.2. Interrupt F
- Page 39 and 40:
C Languagei = __setspsr (0, SR_F |
- Page 41 and 42:
C Language__get_FAULTMASKunsigned i
- Page 43 and 44:
C Language__REVSHsigned int __REVSH
- Page 45 and 46:
Chapter 2. C++ LanguageThe TASKING
- Page 47 and 48:
C++ Language• explicit is accepte
- Page 49 and 50:
C++ LanguageS s; // OK.S s2; // Ins
- Page 51 and 52:
C++ Language• Functions can be "d
- Page 53 and 54:
C++ Language• When option --nonco
- Page 55 and 56:
C++ Languageenum E { e, };2.3. GNU
- Page 57 and 58:
C++ Language• Dollar signs ($) ar
- Page 59 and 60:
C++ Language• An explicit instant
- Page 61 and 62:
C++ Languageextern "C" { void f(int
- Page 63 and 64:
C++ Language• An inherited type n
- Page 65 and 66:
C++ Language}template< typename T >
- Page 67 and 68:
C++ Language• When doing nonclass
- Page 69 and 70:
C++ Language}f(p, x); // calls #1
- Page 71 and 72:
C++ LanguageThis means a program ca
- Page 73 and 74:
C++ LanguageIf you are using Borlan
- Page 75 and 76:
C++ Language#pragma instantiate A#p
- Page 77 and 78:
C++ Languageexport template T const
- Page 79 and 80:
C++ LanguageThe export_info file co
- Page 81 and 82:
C++ LanguageonceWhen placed at the
- Page 83 and 84:
C++ LanguageMacro__EXCEPTIONS__FILE
- Page 85 and 86:
C++ LanguageMacro__VIRTUAL_FUNCTION
- Page 87 and 88:
C++ LanguageWhen the host system do
- Page 89 and 90:
C++ Language• #pragma hdrstop may
- Page 91 and 92:
Chapter 3. Assembly LanguageThis ch
- Page 93 and 94:
Assembly LanguageCharacter Descript
- Page 95 and 96:
Assembly Language3.5. RegistersThe
- Page 97 and 98:
Assembly Language3.6.3. Expression
- Page 99 and 100:
Assembly Language'.' and a user def
- Page 101 and 102:
Assembly Language@BIGENDIAN()Return
- Page 103 and 104:
Assembly Language.DEFINE ID "@STRCA
- Page 105 and 106:
Assembly Language3.9.1. Overview of
- Page 107 and 108:
Assembly Language.ALIGNSyntax.ALIGN
- Page 109 and 110:
Assembly Language.BS, .BSB, .BSH, .
- Page 111 and 112:
Assembly Language.CALLSSyntaxor.CAL
- Page 113 and 114:
Assembly Language.DB, .DH, .DW, .DD
- Page 115 and 116:
Assembly Language.DEFINESyntax.DEFI
- Page 117 and 118:
Assembly Language.ENDSyntax.ENDDesc
- Page 119 and 120:
Assembly Language.EXTERNSyntax.EXTE
- Page 121 and 122:
Assembly Language.FOR, .ENDFORSynta
- Page 123 and 124:
Assembly Language.GLOBALSyntax.GLOB
- Page 125 and 126:
Assembly Language... ; code for the
- Page 127 and 128:
Assembly Language.LIST, .NOLISTSynt
- Page 129 and 130:
Assembly Language.MACRO, .ENDMSynta
- Page 131 and 132:
Assembly Language.MESSAGESyntax.MES
- Page 133 and 134:
Assembly Language.OFFSETSyntax.OFFS
- Page 135 and 136:
Assembly LanguageAssembler option -
- Page 137 and 138:
Assembly Language.SECTION, .ENDSECS
- Page 139 and 140:
Assembly Language.SIZESyntax.SIZEsy
- Page 141 and 142:
Assembly Language.TITLESyntax.TITLE
- Page 143 and 144:
Assembly Language.UNDEFSyntax.UNDEF
- Page 145 and 146:
Assembly Language3.10. Macro Operat
- Page 147 and 148:
Assembly LanguageExample: Argument
- Page 149 and 150:
Assembly Languageit expands as:.MES
- Page 151 and 152:
Assembly LanguageMOV32 ARM and Thum
- Page 153 and 154:
Assembly LanguageADD, SUB inversion
- Page 155 and 156:
Chapter 4. Using the C CompilerThis
- Page 157 and 158:
Using the C Compiler• Build Selec
- Page 159 and 160:
Using the C CompilerFirst the compi
- Page 161 and 162:
Using the C Compiler#pragma endopti
- Page 163 and 164:
Using the C CompilerMIL splitting (
- Page 165 and 166:
Using the C Compiler4.5.3. Optimize
- Page 167 and 168:
Using the C Compilercmp r1,r0blt .L
- Page 169 and 170:
Using the C Compilercompiled.This i
- Page 171 and 172:
Using the C Compilerexecuted, and t
- Page 173 and 174:
Using the C Compilerrecommendations
- Page 175 and 176:
Using the C Compiler4.8. C Compiler
- Page 177 and 178:
Chapter 5. Using the C++ CompilerTh
- Page 179 and 180:
Using the C++ Compiler4. Select the
- Page 181 and 182:
Using the C++ CompilerR (Remarks)Re
- Page 183 and 184:
Chapter 6. ProfilingProfiling is th
- Page 185 and 186:
Profilingalso information about whi
- Page 187 and 188:
ProfilingFor the command line, see
- Page 189 and 190:
ProfilingThe project LSL file is up
- Page 191 and 192:
ProfilingThe profiling informationB
- Page 193 and 194:
ProfilingIn the right pane the Sett
- Page 195 and 196:
Chapter 7. Using the AssemblerThis
- Page 197 and 198:
Using the Assemblermenu item. In or
- Page 199 and 200:
Using the AssemblerExample on the c
- Page 201 and 202:
Chapter 8. Using the LinkerThis cha
- Page 203 and 204:
Using the LinkerTermRelocationinfor
- Page 205 and 206:
Using the LinkerTo assign locations
- Page 207 and 208:
Using the LinkerAn overview of the
- Page 209 and 210:
Using the LinkerIf the library resi
- Page 211 and 212:
Using the LinkerThis links the file
- Page 213 and 214:
Using the LinkerWhen this optimizat
- Page 215 and 216:
Using the Linker2. You can edit the
- Page 217 and 218:
Using the Linker• convert a logic
- Page 219 and 220:
Using the LinkerAddress spacesA log
- Page 221 and 222:
Using the Linkerbus local_bus{mau =
- Page 223 and 224:
Using the Linker2. In the left pane
- Page 225 and 226:
Using the LinkerThis completes the
- Page 227 and 228:
Using the Linkerlkarm --map-file te
- Page 229 and 230:
Chapter 9. Run-time EnvironmentThis
- Page 231 and 232:
Run-time EnvironmentDefineexit_lc_u
- Page 233 and 234:
Run-time EnvironmentMain applicatio
- Page 235 and 236:
Run-time Environment0x00000000 then
- Page 237 and 238:
Run-time EnvironmentAll ARM archite
- Page 239 and 240:
Run-time EnvironmentHeap allocation
- Page 241 and 242:
Chapter 10. Using the UtilitiesThe
- Page 243 and 244:
Using the Utilities10.2. Make Utili
- Page 245 and 246:
Using the UtilitiesoptionFor a comp
- Page 247 and 248:
Using the UtilitiesTarget.SILENT.SU
- Page 249 and 250:
Using the UtilitiesLDFLAGS = -lcarm
- Page 251 and 252:
Using the Utilities$(match .obj pro
- Page 253 and 254:
Using the Utilitieselse-linesendif1
- Page 255 and 256:
Using the UtilitiesStatic pattern r
- Page 257 and 258:
Using the UtilitiesDINNER = $(FOOD)
- Page 259 and 260:
Using the Utilities$(foreach var-na
- Page 261 and 262:
Using the UtilitiesCommandecho arg.
- Page 263 and 264:
Using the Utilities6. Build the pro
- Page 265 and 266:
Using the UtilitiesExtract all modu
- Page 267 and 268:
Using the Utilitiesccarm -g -t hell
- Page 269 and 270:
Using the Utilitiesaddress columnen
- Page 271 and 272:
Using the UtilitiesAssembly level s
- Page 273 and 274:
Chapter 11. Using the DebuggerThis
- Page 275 and 276:
Using the Debugger• Initial downl
- Page 277 and 278:
Using the DebuggerSource tabOn the
- Page 279 and 280:
Using the DebuggerWhen this option
- Page 281 and 282:
Using the DebuggerThe number beside
- Page 283 and 284:
Using the DebuggerThe target halts
- Page 285 and 286:
Using the Debugger2. Enter an expre
- Page 287 and 288:
Using the Debugger• After the sec
- Page 289 and 290:
Using the Debugger• Right-click i
- Page 291 and 292:
Using the Debugger4. In the Device
- Page 293 and 294:
Chapter 12. Target Board SupportThi
- Page 295 and 296:
Target Board SupportNameSTM32L-Disc
- Page 297 and 298:
Target Board SupportConnecting the
- Page 299 and 300:
Target Board Support3. Connect the
- Page 301 and 302:
Target Board SupportTarget board de
- Page 303 and 304:
Target Board SupportTarget board de
- Page 305 and 306:
Target Board SupportTarget board de
- Page 307 and 308:
Target Board SupportTarget board de
- Page 309 and 310:
Target Board SupportTarget board de
- Page 311 and 312:
Target Board SupportUse the followi
- Page 313 and 314:
Target Board SupportConnecting the
- Page 315 and 316:
Target Board SupportConnecting the
- Page 317 and 318:
Target Board SupportInstalling driv
- Page 319 and 320:
Target Board Support12.25. Using th
- Page 321 and 322:
Target Board Support3. Power the bo
- Page 323 and 324:
Target Board SupportJumper settings
- Page 325 and 326:
Target Board Support12.30. Using th
- Page 327 and 328:
Target Board SupportEclipse target
- Page 329 and 330:
Target Board SupportInstalling driv
- Page 331 and 332:
Target Board Support12.35. Using th
- Page 333 and 334:
Target Board SupportUse the followi
- Page 335 and 336:
Chapter 13. Tool OptionsThis chapte
- Page 337 and 338:
Tool OptionsEclipse optionUse FPUAl
- Page 339 and 340:
Tool OptionsEclipse optionDescripti
- Page 341 and 342:
Tool Options13.1. Configuring the C
- Page 343 and 344:
Tool OptionsC compiler option: --al
- Page 345 and 346:
Tool OptionsC compiler option: --ca
- Page 347 and 348:
Tool OptionsRelated information-337
- Page 349 and 350:
Tool OptionsC compiler option: --ch
- Page 351 and 352:
Tool OptionsC compiler option: --co
- Page 353 and 354:
Tool OptionsC compiler option: --de
- Page 355 and 356:
Tool OptionsC compiler option: --de
- Page 357 and 358:
Tool OptionsC compiler option: --de
- Page 359 and 360:
Tool OptionsE282: unterminated comm
- Page 361 and 362:
Tool OptionsC compiler option: --er
- Page 363 and 364:
Tool OptionsC compiler option: --gl
- Page 365 and 366:
Tool OptionsC compiler option: --in
- Page 367 and 368:
Tool OptionsC compiler option: --in
- Page 369 and 370:
Tool OptionsC compiler option: --in
- Page 371 and 372:
Tool OptionsC compiler option: --in
- Page 373 and 374:
Tool OptionsC compiler option: --ke
- Page 375 and 376:
Tool Options• Allow zero sized ar
- Page 377 and 378:
Tool Optionsstr r0,[r3,#0]bne .L2st
- Page 379 and 380:
Tool OptionsC compiler option: --ma
- Page 381 and 382:
Tool OptionsC compiler option: --mi
- Page 383 and 384:
Tool OptionsC compiler option: --mi
- Page 385 and 386:
Tool OptionsC compiler option: --no
- Page 387 and 388:
Tool OptionsC compiler option: --op
- Page 389 and 390:
Tool OptionsRelated informationC co
- Page 391 and 392:
Tool Options• It is possible to n
- Page 393 and 394:
Tool OptionsC compiler option: --pr
- Page 395 and 396:
Tool OptionsC compiler option: --pr
- Page 397 and 398:
Tool OptionsC compiler option: --re
- Page 399 and 400:
Tool OptionsC compiler option: --ru
- Page 401 and 402:
Tool OptionsC compiler option: --si
- Page 403 and 404:
Tool OptionsC compiler option: --so
- Page 405 and 406:
Tool OptionsC compiler option: --th
- Page 407 and 408:
Tool OptionsC compiler option: --uc
- Page 409 and 410:
Tool OptionsC compiler option: --un
- Page 411 and 412:
Tool OptionsC compiler option: --wa
- Page 413 and 414:
Tool OptionsC++ compiler option: --
- Page 415 and 416:
Tool OptionsC++ compiler option: --
- Page 417 and 418:
Tool OptionsC++ compiler option: --
- Page 419 and 420:
Tool OptionsC++ compiler option: --
- Page 421 and 422:
Tool OptionsC++ compiler option: --
- Page 423 and 424:
Tool OptionsC++ compiler option: --
- Page 425 and 426:
Tool OptionsC++ compiler option: --
- Page 427 and 428:
Tool OptionsC++ compiler option: --
- Page 429 and 430:
Tool OptionsC++ compiler option: --
- Page 431 and 432:
Tool OptionsC++ compiler option: --
- Page 433 and 434:
Tool OptionsC++ compiler option: --
- Page 435 and 436:
Tool OptionsC++ compiler option: --
- Page 437 and 438:
Tool OptionsC++ compiler option: --
- Page 439 and 440:
Tool OptionsC++ compiler option: --
- Page 441 and 442:
Tool OptionsC++ compiler option: --
- Page 443 and 444:
Tool OptionsC++ compiler option: --
- Page 445 and 446:
Tool OptionsC++ compiler option: --
- Page 447 and 448:
Tool OptionsC++ compiler option: --
- Page 449 and 450:
Tool OptionsC++ compiler option: --
- Page 451 and 452:
Tool OptionsC++ compiler option: --
- Page 453 and 454:
Tool OptionsC++ compiler option: --
- Page 455 and 456:
Tool OptionsC++ compiler option: --
- Page 457 and 458:
Tool OptionsC++ compiler option: --
- Page 459 and 460:
Tool OptionsC++ compiler option: --
- Page 461 and 462:
Tool OptionsR, W,E, or CExampleAn i
- Page 463 and 464:
Tool OptionsC++ compiler option: --
- Page 465 and 466:
Tool OptionsC++ compiler option: --
- Page 467 and 468:
Tool OptionsC++ compiler option: --
- Page 469 and 470:
Tool OptionsC++ compiler option: --
- Page 471 and 472:
Tool OptionsC++ compiler option: --
- Page 473 and 474:
Tool OptionsC++ compiler option: --
- Page 475 and 476:
Tool OptionsC++ compiler option: --
- Page 477 and 478:
Tool OptionsC++ compiler option: --
- Page 479 and 480:
Tool OptionsC++ compiler option: --
- Page 481 and 482:
Tool OptionsC++ compiler option: --
- Page 483 and 484:
Tool OptionsC++ compiler option: --
- Page 485 and 486:
Tool OptionsC++ compiler option: --
- Page 487 and 488:
Tool OptionsC++ compiler option: --
- Page 489 and 490:
Tool OptionsC++ compiler option: --
- Page 491 and 492:
Tool OptionsC++ compiler option: --
- Page 493 and 494:
Tool OptionsC++ compiler option: --
- Page 495 and 496:
Tool OptionsC++ compiler option: --
- Page 497 and 498:
Tool OptionsC++ compiler option: --
- Page 499 and 500:
Tool OptionsC++ compiler option: --
- Page 501 and 502:
Tool OptionsC++ compiler option: --
- Page 503 and 504:
Tool OptionsC++ compiler option: --
- Page 505 and 506:
Tool OptionsC++ compiler option: --
- Page 507 and 508:
Tool OptionsC++ compiler option: --
- Page 509 and 510:
Tool OptionsWith --preprocess=+noli
- Page 511 and 512:
Tool OptionsC++ compiler option: --
- Page 513 and 514:
Tool OptionsC++ compiler option: --
- Page 515 and 516:
Tool OptionsC++ compiler option: --
- Page 517 and 518:
Tool OptionsC++ compiler option: --
- Page 519 and 520:
Tool OptionsC++ compiler option: --
- Page 521 and 522:
Tool OptionsC++ compiler option: --
- Page 523 and 524:
Tool OptionsC++ compiler option: --
- Page 525 and 526:
Tool OptionsC++ compiler option: --
- Page 527 and 528:
Tool OptionsC++ compiler option: --
- Page 529 and 530:
Tool OptionsC++ compiler option: --
- Page 531 and 532:
Tool OptionsC++ compiler option: --
- Page 533 and 534:
Tool OptionsC++ compiler option: --
- Page 535 and 536:
Tool OptionsC++ compiler option: --
- Page 537 and 538:
Tool OptionsC++ compiler option: --
- Page 539 and 540:
Tool OptionsC++ compiler option: --
- Page 541 and 542:
Tool OptionsAssembler option: --cas
- Page 543 and 544:
Tool OptionsAssembler option: --cod
- Page 545 and 546:
Tool OptionsAssembler option: --deb
- Page 547 and 548:
Tool OptionsYou can now use a macro
- Page 549 and 550:
Tool OptionsAssembler option: --dia
- Page 551 and 552:
Tool OptionsAssembler option: --emi
- Page 553 and 554:
Tool OptionsAssembler option: --err
- Page 555 and 556:
Tool OptionsAssembler option: --hel
- Page 557 and 558:
Tool OptionsRelated informationAsse
- Page 559 and 560:
Tool OptionsAssembler option: --inv
- Page 561 and 562:
Tool OptionsAssembler option: --lis
- Page 563 and 564:
Tool OptionsDescriptionWith this op
- Page 565 and 566:
Tool OptionsAssembler option: --no-
- Page 567 and 568:
Tool OptionsAssembler option: --opt
- Page 569 and 570:
Tool OptionsAssembler option: --out
- Page 571 and 572:
Tool OptionsAssembler option: --pag
- Page 573 and 574:
Tool OptionsAssembler option: --pre
- Page 575 and 576:
Tool OptionsAssembler option: --sec
- Page 577 and 578:
Tool OptionsAssembler option: --sym
- Page 579 and 580:
Tool OptionsAssembler option: --ver
- Page 581 and 582:
Tool Options13.5. Linker OptionsThi
- Page 583 and 584:
Tool OptionsLinker option: --chip-o
- Page 585 and 586:
Tool OptionsLinker option: --code-e
- Page 587 and 588:
Tool OptionsLinker option: --define
- Page 589 and 590:
Tool OptionsLinker option: --diagMe
- Page 591 and 592:
Tool OptionsLinker option: --endian
- Page 593 and 594:
Tool OptionsLinker option: --error-
- Page 595 and 596:
Tool OptionsLinker option: --first-
- Page 597 and 598:
Tool OptionsLinker option: --help (
- Page 599 and 600:
Tool OptionsLinker option: --hex-re
- Page 601 and 602:
Tool OptionsLinker option: --includ
- Page 603 and 604:
Tool OptionsLinker option: --keep-o
- Page 605 and 606:
Tool OptionsLinker option: --librar
- Page 607 and 608:
Tool OptionsLinker option: --link-o
- Page 609 and 610:
Tool OptionsLinker option: --lsl-ch
- Page 611 and 612:
Tool OptionsLinker option: --lsl-fi
- Page 613 and 614:
Tool OptionsLinker option: --map-fi
- Page 615 and 616:
Tool OptionsDescriptionWith this op
- Page 617 and 618:
Tool OptionsLinker option: --munchM
- Page 619 and 620: Tool OptionsLinker option: --no-res
- Page 621 and 622: Tool OptionsLinker option: --no-war
- Page 623 and 624: Tool OptionsDefault: --optimize=1De
- Page 625 and 626: Tool Options• It is possible to n
- Page 627 and 628: Tool OptionsExampleTo create the ou
- Page 629 and 630: Tool OptionsLinker option: --strip-
- Page 631 and 632: Tool OptionsLinker option: --verbos
- Page 633 and 634: Tool OptionsLinker option: --warnin
- Page 635 and 636: Tool OptionsControl program option:
- Page 637 and 638: Tool OptionsControl program option:
- Page 639 and 640: Tool OptionsControl program option:
- Page 641 and 642: Tool OptionsControl program option:
- Page 643 and 644: Tool OptionsControl program option:
- Page 645 and 646: Tool Optionsccarm --define=DEMO tes
- Page 647 and 648: Tool OptionsControl program option:
- Page 649 and 650: Tool OptionsControl program option:
- Page 651 and 652: Tool OptionsControl program option:
- Page 653 and 654: Tool OptionsControl program option:
- Page 655 and 656: Tool OptionsControl program option:
- Page 657 and 658: Tool OptionsControl program option:
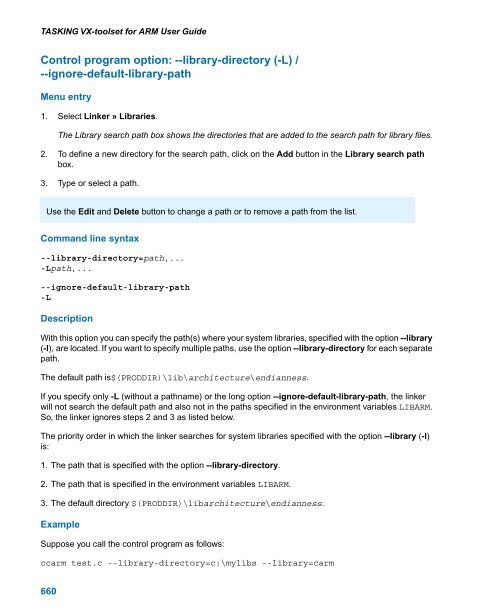
- Page 659 and 660: Tool OptionsControl program option:
- Page 661 and 662: Tool OptionsControl program option:
- Page 663 and 664: Tool OptionsControl program option:
- Page 665 and 666: Tool OptionsControl program option:
- Page 667 and 668: Tool OptionsControl program option:
- Page 669: Tool OptionsControl program option:
- Page 673 and 674: Tool OptionsControl program option:
- Page 675 and 676: Tool OptionsControl program option:
- Page 677 and 678: Tool OptionsControl program option:
- Page 679 and 680: Tool OptionsControl program option:
- Page 681 and 682: Tool OptionsControl program option:
- Page 683 and 684: Tool Options--debug-info--define=DE
- Page 685 and 686: Tool OptionsControl program option:
- Page 687 and 688: Tool OptionsWith --preprocess=+make
- Page 689 and 690: Tool OptionsControl program option:
- Page 691 and 692: Tool OptionsControl program option:
- Page 693 and 694: Tool OptionsControl program option:
- Page 695 and 696: Tool OptionsControl program option:
- Page 697 and 698: Tool OptionsControl program option:
- Page 699 and 700: Tool OptionsControl program option:
- Page 701 and 702: Tool OptionsDefining MacrosCommand
- Page 703 and 704: Tool OptionsMake utility option: -a
- Page 705 and 706: Tool OptionsMake utility option: -D
- Page 707 and 708: Tool OptionsMake utility option: -e
- Page 709 and 710: Tool OptionsMake utility option: -f
- Page 711 and 712: Tool OptionsMake utility option: -i
- Page 713 and 714: Tool OptionsMake utility option: -k
- Page 715 and 716: Tool OptionsSpecify the option file
- Page 717 and 718: Tool OptionsMake utility option: -p
- Page 719 and 720: Tool OptionsMake utility option: -r
- Page 721 and 722:
Tool OptionsMake utility option: -s
- Page 723 and 724:
Tool OptionsMake utility option: -t
- Page 725 and 726:
Tool OptionsMake utility option: -W
- Page 727 and 728:
Tool OptionsMake utility option: -x
- Page 729 and 730:
Tool OptionsParallel make utility o
- Page 731 and 732:
Tool OptionsParallel make utility o
- Page 733 and 734:
Tool OptionsParallel make utility o
- Page 735 and 736:
Tool OptionsParallel make utility o
- Page 737 and 738:
Tool OptionsParallel make utility o
- Page 739 and 740:
Tool OptionsParallel make utility o
- Page 741 and 742:
Tool OptionsParallel make utility o
- Page 743 and 744:
Tool OptionsDescriptionDisplay opti
- Page 745 and 746:
Tool OptionsArchiver option: --dump
- Page 747 and 748:
Tool OptionsArchiver option: --help
- Page 749 and 750:
Tool OptionsArchiver option: --opti
- Page 751 and 752:
Tool OptionsArchiver option: --prin
- Page 753 and 754:
Tool OptionsThe library mylib.lib a
- Page 755 and 756:
Tool OptionsArchiver option: --warn
- Page 757 and 758:
Tool OptionsHLL object dumper optio
- Page 759 and 760:
Tool OptionsHLL object dumper optio
- Page 761 and 762:
Tool OptionsHLL object dumper optio
- Page 763 and 764:
Tool OptionsHLL object dumper optio
- Page 765 and 766:
Tool OptionsHLL object dumper optio
- Page 767 and 768:
Tool OptionsHLL object dumper optio
- Page 769 and 770:
Tool OptionsHLL object dumper optio
- Page 771 and 772:
Tool OptionsHLL object dumper optio
- Page 773 and 774:
Tool OptionsHLL object dumper optio
- Page 775 and 776:
Tool OptionsHLL object dumper optio
- Page 777 and 778:
Chapter 14. LibrariesThis chapter c
- Page 779 and 780:
Libraries14.1. Using the CMSIS DSP
- Page 781 and 782:
LibrariesPower and absolute-value f
- Page 783 and 784:
LibrariesEFAULT 9 Bad addressEEXIST
- Page 785 and 786:
Librariescopysign(double d,double s
- Page 787 and 788:
LibrariesReturns a pointer to type
- Page 789 and 790:
Librariesmath.hscalbnscalblntgmath.
- Page 791 and 792:
Librariesmath.htgmath.hDescriptione
- Page 793 and 794:
Librariesva_arg(va_list ap,type)va_
- Page 795 and 796:
LibrariesFile accessstdio.hfopen(na
- Page 797 and 798:
Librariesprintf conversion characte
- Page 799 and 800:
Librariesstdio.hvfprintf(stream,for
- Page 801 and 802:
LibrariesRandom accessstdio.hfseek(
- Page 803 and 804:
Librariesstdlib.hfloat strtof(*s,**
- Page 805 and 806:
Librariesmbstowcs(*pwcs,*s,n) Conve
- Page 807 and 808:
Librariesclock_t unsigned long long
- Page 809 and 810:
Libraries%x%X%y%Y%z%Z%%local date r
- Page 811 and 812:
Libraries14.2.29. wctype.hMost func
- Page 813 and 814:
LibrariesFunctionbsearchbtowccabs c
- Page 815 and 816:
LibrariesFunctionfmod fmodf fmodlfo
- Page 817 and 818:
LibrariesFunctionlogb logbf logbllo
- Page 819 and 820:
LibrariesFunctionstrcspn wcscspnstr
- Page 821 and 822:
LibrariesThe I/O part of the C libr
- Page 823 and 824:
Chapter 15. List File FormatsThis c
- Page 825 and 826:
List File FormatsEach page displays
- Page 827 and 828:
List File FormatsModule Local Symbo
- Page 829 and 830:
List File FormatsColorCollapseSecti
- Page 831 and 832:
List File FormatsRemoved SectionsTh
- Page 833 and 834:
Chapter 16. Object File FormatsThis
- Page 835 and 836:
Object File FormatsExtended Linear
- Page 837 and 838:
Object File FormatsS0 - recordS0len
- Page 839 and 840:
Chapter 17. Linker Script Language
- Page 841 and 842:
Linker Script Language (LSL)form th
- Page 843 and 844:
Linker Script Language (LSL)tag_att
- Page 845 and 846:
Linker Script Language (LSL)max()in
- Page 847 and 848:
Linker Script Language (LSL)| reser
- Page 849 and 850:
Linker Script Language (LSL)heap_de
- Page 851 and 852:
Linker Script Language (LSL)derivat
- Page 853 and 854:
Linker Script Language (LSL)section
- Page 855 and 856:
Linker Script Language (LSL)addr_ab
- Page 857 and 858:
Linker Script Language (LSL)17.4. S
- Page 859 and 860:
Linker Script Language (LSL)17.4.2.
- Page 861 and 862:
Linker Script Language (LSL)Vector
- Page 863 and 864:
Linker Script Language (LSL)}page_s
- Page 865 and 866:
Linker Script Language (LSL){}mau =
- Page 867 and 868:
Linker Script Language (LSL)}archit
- Page 869 and 870:
Linker Script Language (LSL)If you
- Page 871 and 872:
Linker Script Language (LSL)vector_
- Page 873 and 874:
Linker Script Language (LSL)the hig
- Page 875 and 876:
Linker Script Language (LSL)Locatin
- Page 877 and 878:
Linker Script Language (LSL)It may
- Page 879 and 880:
Linker Script Language (LSL)17.8.3.
- Page 881 and 882:
Linker Script Language (LSL)The fil
- Page 883 and 884:
Linker Script Language (LSL)group (
- Page 885 and 886:
Chapter 18. Debug Target Configurat
- Page 887 and 888:
Debug Target Configuration FilesEle
- Page 889 and 890:
Debug Target Configuration FilesST-
- Page 891 and 892:
Chapter 19. CPU Problem Bypasses an
- Page 893 and 894:
Chapter 20. CERT C Secure Coding St
- Page 895 and 896:
CERT C Secure Coding StandardDCL32-
- Page 897 and 898:
CERT C Secure Coding Standard20.6.
- Page 899 and 900:
CERT C Secure Coding Standard20.11.
- Page 901 and 902:
Chapter 21. MISRA-C RulesThis chapt
- Page 903 and 904:
MISRA-C Rules46.47.48.49.50.51.52.5
- Page 905 and 906:
MISRA-C Rules106.(R)Automatic addre
- Page 907 and 908:
MISRA-C RulesIdentifiers5.15.25.35.
- Page 909 and 910:
MISRA-C RulesPointer type conversio
- Page 911 and 912:
MISRA-C RulesFunctions16.116.216.31
- Page 913 and 914:
MISRA-C Rules20.420.520.620.720.820