Jane's Navy International Features BlueView
Jane's Navy International Features BlueView
Jane's Navy International Features BlueView

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
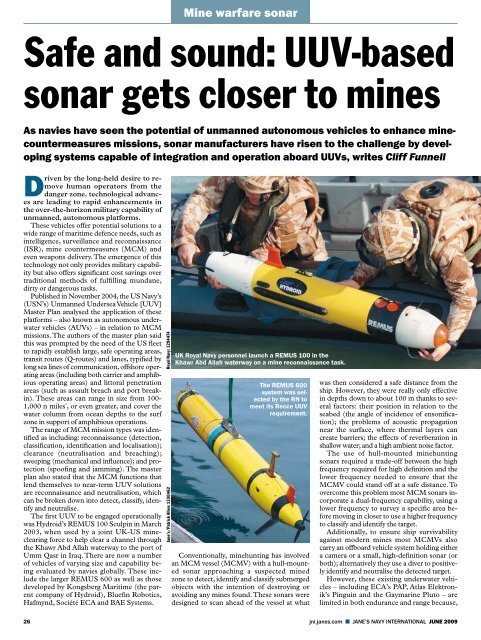
Mine warfare sonarNURC: 1193205Large-scale anddetailed imagery fromthe Thales syntheticaperture sonar fittedto the NATO UnderseaResearch Centre’sBluefin-21 MUSCLEvehicle. Visible is aslightly buried dummytarget, shaped like atruncated cone, of1 m diameter and45 cm height. Resolutionis 1.6 m x 5 cm;water depth is 20 m;and sonar altitudeis 10 m.DIDSON data collectedby Bluefin Roboticsand processed byAcoustic View showsthe hull of a ship.Sound Metrics: 1345266operation from Hunt-class MCMVs will beconfigured with an EdgeTech 2200-S 850 kHzside-scan sonar, an Imagenex Delta-T 1.7 MHzimaging sonar and an Edgetech 2200-S4-24 kHz sub-bottom profiler. The REMUS600 has also been fitted with SAS systems providedby Pennsylvania State University/AppliedResearch Laboratory (PSU/ARL) and AppliedSignal Technology, as well as with the KongsbergEM3000 multibeam sonar.HUGIN for NorwayKongsberg’s HUGIN mine reconnaissance system(MRS), based on the HUGIN 1000 AUV,has been evaluated with a number of minehuntingsonars; these include the EdgeTech MP-Xside-scan sonar and EdgeTech 4400, SEN-SOTEK and HISAS 1030 SAS systems. Thecurrent generation of the HUGIN 1000 multirolevehicle includes Kongsberg’s HISAS 1030interferometric SAS, the EM3002 multibeamecho-sounder, the Imagenex forward-lookingsonar and (optionally) a camera and a subbottomprofiler. The evaluation has been donein close co-operation with the Royal Norwegian<strong>Navy</strong> (RNoN), which has had an operableAUV MCM capability for more than five years.The Bluefin-21-based Battlespace PreparationAutonomous Underwater Vehicle(BPAUV), which will feature as part of themine-warfare mission package equipping theUSN’s Littoral Combat Ship (LCS), is designedto travel on a pre-set mission plan, followingwaypoints, while recording bottommaps and other oceanographic data. After thevehicle is recovered, its data will be transferredvia the LCS command-and-control system tothe PMA software.Contact information and environmentaldata will then be uploaded to the Mine Warfareand Environmental Decision Aids Library.The BPAUV is able to map 150 mswaths at depths down to 200 m, with its Klein5500 455 kHz side-scan sonar providing 7.5-10 cm resolution imagery. Eleven BPAUVsQinetiQ: 1039918have been built and delivered to date. TheBluefin-21 has also been fitted with a numberof SAS systems developed by QinetiQ andThales Underwater Systems.The Bluefin-12 vehicle that forms part of theUSN’s Surface MCM Unmanned UnderwaterVehicle Program: Increment 2 (SMCM/UUV-2) is fitted with a QinetiQ SAS, while an ONRownedvehicle is fitted with a PSU/ARL SASdesignated SAS-12, which it demonstrated lastMay at AUV Fest 2008 at the Naval UnderseaWarfare Center in Newport, Rhode Island.Vehicles that are required to identify minesand/or assist in their detonation are likely tocarry forward-looking high-resolution imagingsonars. They can also be employed for the gapfillingrole when using sideways-looking sidescansonars or SAS systems. Other applicationsinclude close-in inspection of ships’ hulls andstructures within ports and harbours for improvisedexplosive devices, as well as obstacleavoidance, target-homing and navigation.One of the smaller manufacturers is Blue-View Technologies, which produces bothhigh-resolution two-dimensional (2-D) imagingand three-dimensional (3-D) microOperations with the Bluefin-21 Gambit UUV forthe UK RN have helped shape the developmentof the QinetiQ SAS payload.bathymetry sonars. Commercial off-the-shelf(COTS) types are the <strong>BlueView</strong> 2-D 450 kHzand 900 kHz imaging sonars (P450E-15,P900E-20 and DF900-2250) and the MB1350and MB2250 microbathymetry systems, operatingat 1,350 kHz (~1-inch [2.5 mm] rangeresolution) and 2,250 kHz (~0.6-inch range resolution)respectively. <strong>BlueView</strong> has a matureSoftware Development Kit that is a library of C/C++ routines that enable low-level access to thesonar control routines and data output, allowingAUV control programmes to also control thesonar, read data and interpret it, and cause thevehicle to respond to the sensed imagery.For tighter integration with specific UUVplatforms, <strong>BlueView</strong> has been building customengineered-to-order versions of its sonar systems,including those providing multiple forward-lookingfields of view (both horizontaland vertical, or multiple frequency), widerfields of view (90 degrees rather than theconventional 45 degrees) and combinationforward-looking and microbathymetry functionalityin the same sonar attachment.At AUV Fest 2008, two Nekton Researchman-portable Ranger UUVs, each fitted witha <strong>BlueView</strong> N900X sonar, demonstrated automatedhoming on simulated mine targets. Atthe same demonstration two Ranger UUVsequipped with an N900X used algorithmsdeveloped by the Massachusetts Institute ofTechnology (MIT) to automatically detect andtrack sonar image features in 46 successfuldata-collection missions. Other UUVs thathave incorporated <strong>BlueView</strong> sonars are theBluefin Hovering AUV, REMUS 100 and theUS Naval Postgraduate School’s Aries vehicle.Another high-resolution imaging sonar isthe DIDSON (Dual-frequency IDentificationSONar), an acoustic lens-based sonar systemable to produce high-resolution images for theinspection and identification of underwater objects.The sonar was developed at the AppliedPhysics Laboratory, University of Washington,with funding from the USN’s Space and NavalWarfare Systems Command, and is now manufacturedby Sound Metrics.The standard system operates at two frequencies(1.8 MHz and 1.1 MHz) and uses acousticlenses, which provide sharp images from1 m to more than 30 m in range. The longerrangesystem results in a lower resolution buthas a range up to 90 m. DIDSON has beenevaluated on both the REMUS 100 and theBluefin Hovering AUV developed jointly byBluefin and MIT under ONR and EOD ProgramOffice funding, and part of US Naval SeaSystems Command’s EOD Hull UnmannedVehicle Localization System (HULS) contract.The basic principle of the SAS is to combinesuccessive pings coherently along aknown track in order to form an image withmuch higher resolution than conventional sonars–typically 10 times higher. The azimuthor along-track resolution of a sonar can becomputed as the ratio between the acousticwavelength and the length of the array. A longerarray will increase this ratio but fitting sucha long array is not always possible or practicalon most underwater vehicles. Operation at ahigher frequency will increase the ratio but willat the same time limit the achievable rangedue to higher acoustic attenuation. The SAS28 jni.janes.com n JANE’S NAVY INTERNATIONAL JUNE 2009
Mine warfare sonarprinciple overcomes these limitations by utilisingdata from several consecutive pings tosynthesise a longer sonar array. Thus, SAStechnology is not as limited by either range orresolution as practical-sized side-scan sonarsare, and is therefore capable of providinghigh-resolution images from UUVs.The USN master plan declared that SAS is“the current leading candidate to best meet therequirements of the MCM mission. SAS promisesto provide both increased area coveragerate (or a reduced required number of UUVs)and increased resolution. A vehicle with SASwould likely have a three- to fivefold improvementin classification area coverage rate and athreefold improvement in resolution”.Custom-made systemsA number of minehunting SAS systems – includingQinetiQ’s Vision 600, Kongsberg’s HI-SAS 1030, Ultra Electronics’ ARTEMES andthe PSU/ARL system – have been developedspecifically for UUVs. Other companies developingsuch systems, or fitting them to UUVs,include Applied Signal Technology, Thales UnderwaterSystems and Atlas Elektronik.QinetiQ’s SAS – Vision 600 is the COTSversion – has been fitted to a number of UUVs.These include: the Bluefin-21 Reliant andGambit that were developed as part of a UK/US collaborative venture; the Sapphires UUVdelivered by Saab Underwater Systems toSweden’s Defence Materiel Administration(FMV) in October 2007; and the two Bluefin-QinetiQ: 1193208The SMCM/UUV-2 programme combines theBluefin-12 UUV with the QinetiQ Vision 600synthetic aperture sonar.12 vehicles that form part of the SMCM/UUV-2 contract awarded to Bluefin Roboticsin August 2006, for deployment and operationfrom the USN’s Avenger-class MCMVs andvessels of opportunity. The aim of SMCM/UUV-2 is to provide a vehicle capable of detectingbottom and partially proud mines to arange of 100 m, as well as offering a capabilityagainst shallow, buried targets.The SAS system consists of a 60 cm arraywith 24 receive array elements per side. By utilisinga configuration that is theoretically capableof achieving a 0.5-inch resolution, QinetiQseeks to ensure the consistent production of a1-inch resolution across a wide range of environmentalconditions. The array is designed toprovide close control of transmit and receivebeam patterns, reducing the susceptibilityto multipath, while the increased number ofphase centre overlaps realised by the longerarray with smaller element spacing allows foreffective filtering of the motion data, furtherexcluding the destructive multipath effects.The increased number of phase centres allowsthe QinetiQ motion compensation system,QDAVA – which integrates informationfrom the displaced phase centre antenna(DPCA) algorithm, vehicle motion sensorsand acoustic modelling – to produce higheraccuracyresults than are obtainable from ahigh-grade inertial navigation system. Thisprovides the ability to extend the path reconstructioncapability and hence the range/resolutionof the system. The increased overlapand QDAVA also seek to reduce reliance ofthe SAS on high platform stability.QinetiQ’s SAS processing algorithms havebeen demonstrated through the successfulcompletion of hundreds of at-sea runs with theGambit UUV in research trials and operationswith the RN. Each vehicle is furnished with aremovable data storage module (RDSM) sothat raw sonar data can be physically removedfrom the vehicle, eliminating long data downloadsand enabling rapid on-deck vehicle turnaround.The RDSM, along with removablebatteries, enables the Bluefin-12 vehicles to beturned around on deck in 30 minutes or less.Resulting from the SENSOTEK technologydemonstrator project managed by Kongsbergand the Norwegian Defence Research Establishmentto develop an interferometric SASfor the HUGIN vehicle, the HISAS 1030 is awideband SAS sonar with a frequency rangeof 60-120 kHz, capable of producing high-KONGSBERG- a leading supplier of advanced defence systemsnnnnPenguin anti-ship missile and Naval Strike Missile (NSM)for sea- and land targetsTactical communication-, C4I- and homeland security systemsSL-AMRAAM, NASAMS and HAWK XXI air defence systemsUnderwater warfare technologies and systemsnnnnIntegrated command, control and planning systems for surfaceships and submarinesAir and ground surveillance, ISTAR and mission planning systemsPROTECTOR – Remote Weapon Station (RWS)Simulation and training systemsKongsberg Defence & Aerospace ASP.O.Box 1003NO-3601 KongsbergNorwaywww.kongsberg.comPhone: + 47 32 28 82 00 - Fax: + 47 32 28 86 20E-mail: office.kda@kongsberg.comWORLD CLASS – through people, technology and dedicationJUNE Untitled-3 2009 JANE’S 1 NAVY INTERNATIONAL n jni.janes.com 17/4/09 10:47:30 am 29
Mine warfare sonarSEA: 1330885resolution acoustic images as well as co-registeredbathymetry. HISAS 1030 and HUGIN1000 have been developed in parallel by thesame team and are optimised for each other.The sonar is tightly integrated with the HU-GIN aided inertial navigation and motionsensing platform and has a resolutionof 2-5 cm both alongand across track. HISAShas a range of up to200 m to each side at4 kt, and 260 m at 3 kt,contributing to an effectivearea coverage ratehigher than 2 km 2 /h. Datais recorded at a rate ofabout 60 Gbit/h onto a detachableRAID system for post-processing onboard the surface vessel.For bathymetry, HISAS 1030 has two fulllengthreceive arrays on each side of the HU-GIN to form two SAS images of the samescene with slightly different geometry, enablingvery-high-resolution interferometric processingfrom SAS data. Typical SAS bathymetryresolution is 10x10 cm, allowing 3-D imagingof mines and mine-like objects. HISAS 1030also has a steerable phased-array transmitter,which can be optimised to avoid multipathand hence extend the range in shallow water.Full-quality HISAS imaging is typically availableout to a range of 10 times UUV altitude inshallow and very shallow water.A full-capability HUGIN MRS, incorporatinga HISAS 1030 high-resolution interferometricSAS, was delivered to the RNoN inMarch 2008 to undertake rapid environmentalassessment, high-precision seabed route surveysand mine detection, classification andlocalisation. HUGINs fitted with the HISAS1030 will also equip the Finnish <strong>Navy</strong>’s threenew MCMV 2010 ships.Ultra Electronics’ ARTEMES high-resolutionSAS system, featuring co-located highresolutionswath bathymetry and side-scanimagery, has been developed for high-speedcoverage for mine detection and is also capableof being operated from UUVs and unmannedsurface vehicles. One concept considered forfuture mine warfare operations is the integrationof ARTEMES with the SeaFox mine-disposalsystem in an unmanned underwater vehicle,enabling a single asset to deliver an integratedmine-detection and -disposal capability. ART-EMES is available in frequencies up to 360 kHzand is in service with a United States-basedclient, with six systems operational.Ultra has also developed a Mini-SAS tri-frequency(273 kHz, 310 kHz and 247 kHz) systemspecifically for use with mid-sized 12-inchUUVs. Making use of wideband pulse compressionwith long-transmit pulses and theThe Bluefin-21 AUV, equipped with ThalesUnderwater Systems’ synthetic aperture sonarmodular payload section.Ultra Versatile Sonar Architecture, Mini-SASaims to provide concurrent side-look withmulti-aspect forward and aft ‘squint’ looks toaugment detection and classification survey.An optional bathymetric capability, to fullSAS resolution, can also be included. Mini-SAS has been demonstrated in very-shallowwateroperations providing SAS and seabedbathymetry coverage at slant ranges in excessof 10:1 of the sonar altitude.Forward Look SonarAnother complementary development isUltra’s VSS Forward Look Sonar (FLS), designedto be configured as a gap-filling sonar,an obstacle avoidance sonar, and as a standaloneforward-look detection and classificationsonar, operating at centre frequencies from60 kHz to 450 kHz. Orthogonal pulses arecombined in the processing to increase theeffective physical aperture length in order toimprove the resolution of the system.Small independently sampled elements unambiguouslysample the full sector of interestforming sector widths of up to ±75 degreesusing a curved transmitter array. Bathymetryis obtained from wideband processing of thebeam-formed data to generate a 3-D imageover the full-range swath from each ping.The FLS is also available in a dual-frequency75 kHz/300 kHz version. It can also form partof a combined system with the SAS system.The first delivery to a US client was due to becompleted in early 2009.The PSU/ARL SAS installed on the Bluefin-12UUV – SAS-12 – operates at 180 kHzin the side-looking mode. A suite of arbitrarywaveforms can be transmitted to optimiseSAS performance in a given environment. Thebroadband receiver is designed for minimalThe SWATHplus-RS100 sonar fitted to the front end of the REMUS 100 UUV.Jane’s/IDR: 1184777channel-to-channel gain and phase errors necessaryfor acquisition of high-fidelity signals.Signals are filtered and decimated then passedto the recorder and processing systems. Theindividual element aperture determines theultimate resolution limit. In principle, SAS-12can be processed for 25 mm resolution at allranges out to a maximum of 150 m.Another Bluefin-21 UUV fitted with an SASwas that acquired by Thales Underwater Systemsas part of the MUSCLE technologydemonstrator system built for the NATO UnderseaResearch Centre (NURC) at La Spezia,Italy. The MUSCLE SAS is a 300 kHz widebandinterferometric SAS optimised for shallow-waterminehunting; it consists of tworeceiver arrays with different vertical fields ofview, each appropriately narrowed to rejectmultipath but steered in different directions soas to cover almost all the full swath. The verticalreceive element comprises upper and lowerarrays made up of 19 and 10 vertical sub-elementsrespectively. The sub-elements are connectedby a shading capacitor-resistor networkthat allows a degree of flexibility, by hardwaremodification, in forming the vertical-beampattern of both arrays. The MUSCLE SASsystem has 13 beams spaced 4 cm apart. It wasplanned to implement onboard SAS processingresolution up to 2.5 cm at 225 m.MUSCLE is being used to demonstratehigh resolution at extended ranges, improvedhighlight data (to enhance classification performance)and increased search rates. Acceptancetesting began at La Spezia in May 2006.A trial conducted by NURC in June 2006demonstrated imaging with shadow contrastin excess of 5 dB at up to 170 m range in 20 mwater depth, with resolutions of 1.6 cm inrange and 5 cm in cross-range.SAS is regarded by NURC as a powerfulenabler towards achieving reliable ATR. Researchat NURC is addressing ATR algorithmsto complement SAS/high-resolution data(these include model-based techniques, adaptiveapproaches to cope with environmentalchanges and online learning algorithms) andthe use of shape theory to support ATR performanceprediction.Although a number of multibeam swathsonars have been developed for surface craft,towed fish or larger UUVs, the challenge hasbeen to integrate this capability with the smaller,man-portable vehicles. One such developmenthas been the GeoSwath Plus, a PC-basedshallow-water (down to 200 m) swath bathymetrysystem from GeoAcoustics. The systemprovides swath coverage of up to 12 timeswater depth to a maximum of 600 m. It is believedthat the 500 kHz version has been fittedto the REMUS 100, Gavia and Talismanvehicles. This has a maximum swath width of150 m, a range of up to 12 times depth and aresolution slant range of 1.5 mm.Another system is the Sea (Group)SWATHplus-RS100 high-resolution bathymetryand side-scan sonar, purpose-designedfor the REMUS 100. This is a 468 kHz sonarfeaturing 1-3 composite transducer technologyand is supplied as a short (38 cm-long) sectionof the UUV. According to SEA, the SWATHplus-RS100has a swath width of up to 15times the vehicle altitude (maximum 75 m) to30 jni.janes.com n JANE’S NAVY INTERNATIONAL JUNE 2009
Mine warfare sonara maximum of 200 m (less than 160 degreesswath width equivalent). Coverage density ismore than 150 samples per metre at a maximumupdate rate of up to 30 Hz. Resolutionacross track (best case) is quoted as 3 cm. Thefirst in-water trials of a SWATHplus-RS100integrated with a REMUS 100 were performedin the UK in March 2008.Collaborating with nearly all minehuntingsonar and man-portable UUV manufacturersis BAE Systems Integrated Systems Technologies.In the words of Andy Tonge, project managerfor the Talisman vehicle, “the futurepotential [of autonomous systems] is vast, particularlyif the paradigm shift towards designingsystems to integrate a total system frommission payload to combat management system[CMS] is made”.Talisman is a family of maritime UUVs usingcommon technology from air and land systems.Its design concept is that of an underwater‘truck’ capable of carrying a range of payloadsweighing up to 500 kg. The second generationof the Talisman concept is the Talisman M,which is designed for remote MCM and configuredto carry minehunting sonars and fourArcherfish mine-disposal neutralisers. As a consequence,it has the capability within a singlemission to locate mine-like objects then eithertelemeter data to an MCM operator or performCAD/CAC on board and, on operator command,deploy an Archerfish to dispose of themine. Talisman has already been integrated intothe NAUTIS CMS that equips the RN’s HuntandSandown-class MCMVs, avoiding the needJane’s/Patrick Allen: 1367620for separate control equipment to be installed inthe ships and allowing existing trained MCMoperators to utilise Talisman as an extension totheir existing capability.A number of demonstrations have beenstaged for the RN and USN, both in very shallowinshore waters and at sea in a dummyminefield. A typical mission consisted of Talismanconducting a sonar survey to identifymine-like objects, then surfacing to establishhigh-bandwidth communication, data transferto the MCM operator and simulated disposalof the mine with Archerfish. While an onboardCAD/CAC system was available, in order todemonstrate the utility of the system a full dataset from a GeoSwath sonar was telemetered tothe operator over the radio-frequency link.Following the identification of a mine target,and with Talisman holding position in a geostationaryhover, the operator initiated anautomated Archerfish launch and vectored theThe Talisman UUVwith SeaBat 7123integrated intothe nose.round to the target, demonstrating the practicalityof combining mine location and minedisposal into a single mission sortie.Talisman is also capable of carrying AtlasElektronik’s SeaFox mine-disposal systemand the REMUS 100. The vehicle can also bedeployed from a vessel of opportunity, avoidingthe requirement for an MCMV to entera minefield.Talisman has recently had a forward-lookingReson SeaBat 7123 advanced MCM sonar installed,operating at 110 kHz, 240 kHz and 455kHz. This sonar was designed for installationon surface ships and has demonstrated that theTalisman is capable of operating with the sameminehunting sonar as a traditional MCMV. nRELATED ARTICLE:l Royal <strong>Navy</strong>-led MCM task group clears the way forIraqi maritime trade, jni.janes.com, 07.05.08Untitled-2 1 14/5/09 10:11:46 amJUNE 2009 JANE’S NAVY INTERNATIONAL n jni.janes.com 31