

Non-rigid registration between 3D ultrasound and CT ... - isl, ee, kaist
Non-rigid registration between 3D ultrasound and CT ... - isl, ee, kaist
Non-rigid registration between 3D ultrasound and CT ... - isl, ee, kaist

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
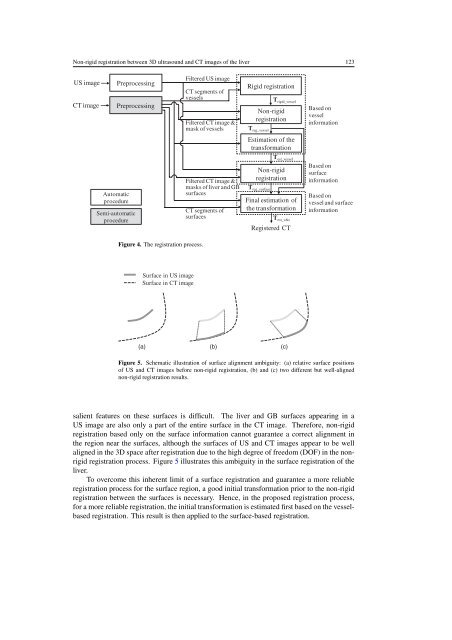
<strong>Non</strong>-<strong>rigid</strong> <strong>registration</strong> <strong>betw<strong>ee</strong>n</strong> <strong>3D</strong> <strong>ultrasound</strong> <strong>and</strong> <strong>CT</strong> images of the liver 123US image<strong>CT</strong> imagePreprocessingPreprocessingFiltered US image<strong>CT</strong> segments ofvesselsFiltered <strong>CT</strong> image &mask of vesselsRigid <strong>registration</strong>T <strong>rigid</strong>_vessel<strong>Non</strong>-<strong>rigid</strong><strong>registration</strong>T reg_vesselBased onvesselinformationEstimation of thetransformationAutomaticprocedureSemi-automaticprocedureFiltered <strong>CT</strong> image &masks of liver <strong>and</strong> GBsurfaces<strong>CT</strong> segments ofsurfacesT est_vessel<strong>Non</strong>-<strong>rigid</strong><strong>registration</strong>T reg_surfaceFinal estimation ofthe transformationT est_v&sRegistered <strong>CT</strong>Based onsurfaceinformationBased onvessel <strong>and</strong> surfaceinformationFigure 4. The <strong>registration</strong> process.Surface in US imageSurface in <strong>CT</strong> image(a) (b) (c)Figure 5. Schematic illustration of surface alignment ambiguity: (a) relative surface positionsof US <strong>and</strong> <strong>CT</strong> images before non-<strong>rigid</strong> <strong>registration</strong>, (b) <strong>and</strong> (c) two different but well-alignednon-<strong>rigid</strong> <strong>registration</strong> results.salient features on these surfaces is difficult. The liver <strong>and</strong> GB surfaces appearing in aUS image are also only a part of the entire surface in the <strong>CT</strong> image. Therefore, non-<strong>rigid</strong><strong>registration</strong> based only on the surface information cannot guarant<strong>ee</strong> a correct alignment inthe region near the surfaces, although the surfaces of US <strong>and</strong> <strong>CT</strong> images appear to be wellaligned in the <strong>3D</strong> space after <strong>registration</strong> due to the high degr<strong>ee</strong> of fr<strong>ee</strong>dom (DOF) in the non<strong>rigid</strong><strong>registration</strong> process. Figure 5 illustrates this ambiguity in the surface <strong>registration</strong> of theliver.To overcome this inherent limit of a surface <strong>registration</strong> <strong>and</strong> guarant<strong>ee</strong> a more reliable<strong>registration</strong> process for the surface region, a good initial transformation prior to the non-<strong>rigid</strong><strong>registration</strong> <strong>betw<strong>ee</strong>n</strong> the surfaces is necessary. Hence, in the proposed <strong>registration</strong> process,for a more reliable <strong>registration</strong>, the initial transformation is estimated first based on the vesselbased<strong>registration</strong>. This result is then applied to the surface-based <strong>registration</strong>.