STABILIZATION ELECTRODYNAMIC SPACE TETHERS
STABILIZATION OF ELECTRODYNAMIC ... - Tethers Unlimited
STABILIZATION OF ELECTRODYNAMIC ... - Tethers Unlimited

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Tethers Unlimited, Inc.Stabilization of Electrodynamic Tethers<strong>STABILIZATION</strong> OF <strong>ELECTRODYNAMIC</strong> <strong>SPACE</strong> <strong>TETHERS</strong>ROBERT P. HOYT<strong>TETHERS</strong> UNLIMITED, INC.19011 36 th Ave W, Suite F, Lynnwood, WA 98036-5752Phone: (425) 744-0400 Fax: -0407 email: TU@tethers.comwww.tethers.comCopyright © 2001 Tethers Unlimited, Inc.
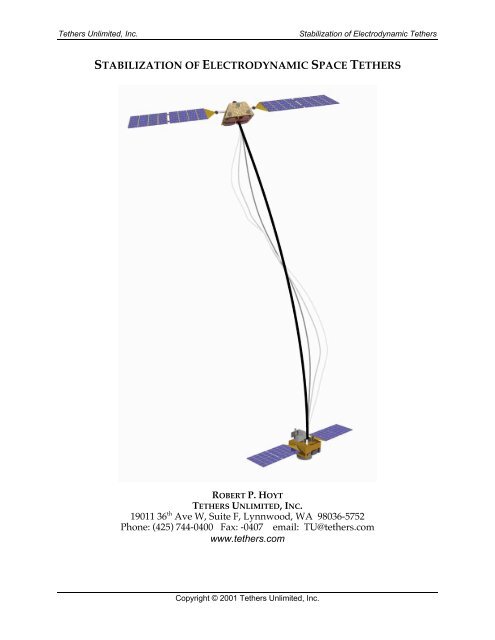
Tethers Unlimited, Inc.Stabilization of Electrodynamic Tethers<strong>STABILIZATION</strong> OF <strong>ELECTRODYNAMIC</strong> <strong>TETHERS</strong>Robert P. HoytTethers Unlimited, Inc., 19011 36 h Ave. W., Suite F, Lynnwood, WA 98036-5752(425) 744-0400 TU@tethers.comAbstract. Electrodynamic tethers are susceptible to instabilities in a number of different modes, includingpendulum librations, transverse wave oscillations, and “skip rope” oscillations. We have developed twosimple feedback algorithms for controlling these oscillations. The first algorithm requires knowledge of themotion of several points along the length of the tether, and control is achieved by varying the tether current.Detailed simulations of electrodynamic tethers indicate that this feedback control algorithm is successful instabilizing the dynamics of electrodynamic tethers during extended periods of operation. The second algorithmrequires only knowledge of the motion of the tether endmass. Simulations indicate that this simpleralgorithm is also successful in stabilizing the dynamics of the tether, although it stabilizes the oscillations ata higher quasi-steady state level.INTRODUCTIONElectrodynamic tethers have strong potentialfor providing propellantless propulsion tospacecraft in low-Earth orbit for applicationssuch as satellite deorbit (Forward, 1998) orbitboosting, and stationkeeping (Johnson, 1998).Unfortunately, however, electrodynamic tethersare inherently unstable (Beletskii, 1993, Levin1987, Pelaez, 2000) When a tether in orbit carriesa current along its length, the interaction of thetether with the geomagnetic field creates a forceon the tether that is directed perpendicular tothe tether. The summation of this force alongthe length of the tether can produce a net propulsive force on the tether system, raising orlowering its orbit. The tether, however, is not arigid rod held above or below the spacecraft. Itis a very long, thin cable, and has little or noflexural rigidity. The transverse electrodynamicforces therefore cause the tether to bow and toswing away from the local vertical. Gravitygradient forces produce a restoring force thatpulls the tether back towards the local vertical,but this results in a pendulum-like motion. Becausethe direction of the geomagnetic fieldvaries as the tether orbits the Earth, the directionand magnitude of the electrodynamic forces alsovaries, and so this pendulum motion developsinto complex librations in both the in-plane andout-of-plane directions. Due to coupling betweenthe in-plane motion and longitudinalelastic oscillations, as well as coupling betweenin-plane and out-of-plane motions, an electrodynamictether operated at a constant currentwill continually add energy to the libration motions,causing the libration amplitudes to builduntil the tether begins rotating or oscillatingwildly. In addition, orbital variations in thestrength and magnitude of the electrodynamicforce will drive transverse, higher-order oscillationsin the tether which can lead to the unstablegrowth of "skip-rope" modes.In this paper, we present the performance of twonew control schemes that provide the ability to preventthe unstable growth of librations, transverseoscillations, and skip-rope modes. These feedbackcontrol schemes requires as input periodic measurementsof the locations of the tether endmassand/or several points along the tether. The feedbackalgorithm calculates a gain factor based uponthe net work that the electrodynamic forces will performon the tether dynamics. The feedback is performedby varying the current in the tether systemOrbitalVelocityMagneticFieldGravityGradientForceCenterof Mass⊕α IPCurrentGravityGradientForceElectrodynamicForceFigure 1. Electrodynamic tether, in drag mode.1
Tethers Unlimited, Inc.Stabilization of Electrodynamic TethersIn reality, however, the Earth's magneticfield rotates along with the Earth. Consequently,the out-of-plane forces that a tether experiencesduring a particular potion of its orbitwill change directions once per day. This meansthat the instability that Columbo observed in theout-of-plane librations is only a concern if thetether current is large enough that the out-ofplanelibration exceeds 45° within twelve hours.If the libration does not go unstable that quickly,then as the Earth rotates inside the tether's orbit,the electrodynamic forces will later damp theout-of-plane oscillations, resulting in periodicgrowth and decay of the out-of-plane oscillations.Hoyt investigated the dynamics of a flexibleelectrodynamic drag tether in a non-ideal, spinningmagnetic field using a numerical simulationof a flexible tether in orbit, and found thatthe primary instability of concern was thegrowth of in-plane-librations (Hoyt, 1998). Heobserved that during some portions of the motionof the tether, the electrodynamic forceswere performing net positive work on the inplanelibration, and during other portions of thelibration they were doing net negative work onthe libration. Using the simulation code, hedemonstrated that by slightly reducing thetether current when the electrodynamic forcesare doing net work on the in-plane libration, andallowing the current to flow unimpeded whenthe forces were reducing the energy in the librations,was sufficient to stabilize the in-plane librationinstability long enough to permit anelectrodynamic tether to deorbit a spacecraftfrom Low Earth Orbit. These simulationsshowed, however, that the simple feedback onthe in-plane libration tended to drive growth oftransverse and skip-rope oscillations. This wasacceptable for the spacecraft deorbit application,because the spacecraft and tether deorbited beforethe oscillations became unmanageable, butfor longer duration propulsion missions, such assatellite stationkeeping, satellite orbital maneuvering,and Space Station reboost, the instabilityof these higher-order modes could pose a significantproblem.Peláez et al. have investigated the dynamicsof an electrodynamic tether in an inclined orbitby modeling the tether as a rigid, inextensiblerod (Peláez, 2000). They found that in inclinedorbits, there are components of the magneticfield oriented along the local vertical. Thesemagnetic field components result in couplingbetween in-plane and out-of-plane motions.This coupling allows electrodynamic interactionswith the horizontal components of themagnetic field to drive the net flow of energy intothe librations of the system, resulting in instabilitiesof the pendulum librations of the tether system.The utility of the analyses and results of these priorstudies, however, are limited by the simplifying assumptionsthat each study used. In reality, theEarth's magnetic field is tilted relative to the Earth'sspin axis, the field is not a perfect dipole, and it rotateswith the Earth. Consequently, any electrodynamictether will experience forces perpendicularto the orbit plane, resulting in out-of-plane motions,which can in turn feed energy into the in-plane motions.Because the density of the Earth's ionospherechanges dramatically from sunlit to eclipse conditions,and changes with the solar conditions, tethercurrents in real systems will likely vary over eachorbit. Moreover, space tethers are not rigid bodies,but cables that can bend, go slack, display temperaturedependent behaviors, and exhibit other nonlinearbehavior. As a result, real tether dynamic behavioris significantly more complex than can becaptures in the analytical treatments reviewedabove. Moreover, a control method for stabilizingthe tether dynamics must be designed to handlethese many non-ideal behaviors, and must be testedwithin a numerical simulation that includes theflexural dynamics, orbital mechanics, non-linearstrain characteristics, and other important physics ofthe tethered system.FEEDBACK CONTROL TO STABILIZE<strong>ELECTRODYNAMIC</strong> <strong>TETHERS</strong>A simple feedback control algorithm may stabilizethe dynamics of the transverse and skip-ropemodes of electrodynamic tethers. The controlmethod is based upon the fact that as the tether librates,oscillates, and orbits the Earth, the electrodynamicforces on the tether will at some times beperforming net positive work on the modes of thetether motion, and at other times they will be performingnet negative work on the tether modes. Thealgorithm does not seek to eliminate tether librations;some libration is an inevitable fact of life in anelectrodynamic tether. It does, however, seek tolimit the growth of the librations, and to prevent thegrowth of higher-order oscillatory modes.Under a NASA/MSFC Phase I SBIR contract,TUI has developed two new feedback algorithmsthat evaluate the work being performed on thetether oscillations and calculate a feedback modulationthat is applied to the tether current to achievenet damping of the unstable tether modes. The firstalgorithm requires periodic measurements of thelocation of several points along the tether; this algorithmis referred to as the “Tether Configuration”feedback method. The second algorithm requires2
Tethers Unlimited, Inc.Stabilization of Electrodynamic Tethersonly periodic measurements of the accelerationof the tether endmass; this algorithm is referredto as the “Endmass Acceleration” feedbackmethod. These algorithms are proprietary, andare the subject of current patent applications, sothey will not be detailed in this paper. They are,however, detailed in the final report on thePhase I SBIR contract (Hoyt, 2001).These stabilization algorithms form the heart ofthe Electrodynamic Tether Stabilization (EDTS)System, illustrated in Figure 2, which will enableelectrodynamic tethers to provide long-term propellantlesspropulsion while maintaining tether stabilityand efficiency.Figure 2. The Electrodynamic Tether Stabilization (EDTS) System.TESTING THE FEEDBACK CONTROLMETHODSTo test this new feedback control algorithm, wehave utilized the TetherSim code to simulatethe behavior of electrodynamic tethers with andwithout various forms of feedback control.TetherSim is a numerical simulation tool thatincludes models for:• tether dynamics, including both an implicitpropagator and an explicit (4 th order RungeKutta) propagator• orbital mechanics, using a 4 th order Runge-Kuttain either Cartesian or spherical coordinates• IGRF magnetic field,• IRI plasma density field,• MSIS90 neutral density field,• tether thermal characteristics,• bare wire electrodynamic interactions with theionosphere,• endmass dynamics.In the simulations, the tether was modeled with 20discrete segments, and the work summation in Eqn(5) was calculated using 10 points along the tether.Perfect knowledge of the velocities of those 103
Tethers Unlimited, Inc.Stabilization of Electrodynamic Tetherspoints was assumed. The feedback control wasperformed once every 10 seconds. Furthermore,to prevent the possible development of shortwavelengthoscillations that can be driven byrapid cycling of the tether current, we limitedthe rate of change of the tether current to 100mA/min. Note also that in these simulations,the tether was modeled as having no longitudinaldamping.Test Case: GLAST Deorbit For testing the controlalgorithm, we chose to utilize a test case involvingthe end-of-mission deorbit of theGLAST spacecraft. The GLAST spacecraft isplanned to be a 3360 kg (drymass) space telescopethat will be placed in a 550 km circular orbit at 28.5°inclination. Deorbit of this spacecraft should representa relatively challenging scenario, because atether system can generate larger currents in deorbitmode than in boost mode, leading to faster instabilitygrowth, and because the tethered system willpass though the range of altitudes where magneticfield and ionospheric density are greatest. Thetether system modeled was a Terminator Tether device with a 10 km long, 15 kg tether constructed ofaluminum wire, with a 15 kg endmass containingthe tether deployer and the control electronics.In PlaneLibration Angle (°)In PlaneLibration Angle (°)In PlaneLibration Angle (°)In PlaneLibration Angle (°)In-Plane Libration Angle40No Feedback200-20-400 2 4 640200-20-400 2 4 640200-20-400 2 4 640200-20Tether Configuration Feedback OnlyIn-Plane LibrationFeedback OnlyTether Configuration andIn-Plane Libration Feedback-400 2 4 6Time (days)OscillationEnergy (J)OscillationEnergy (J)OscillationEnergy (J)OscillationEnergy (J)100050000 2 4 6100050010005001000500Oscillation EnergyNo FeedbackTether Configuration Feedback Only00 2 4 6In-Plane LibrationFeedback Only00 2 4 6Tether Configuration andIn-Plane Libration Feedback00 2 4 6Time (days)Figure 3. Comparison of simulation results for deorbit of a 3360 kg GLAST spacecraft by a TerminatorTether device with a 15 kg, 10 km tether and a 15 kg endmass, with no feedback, tether configurationfeedback, in-plane libration feedback, and both tether configuration and in-plane libration feedback.2
Tethers Unlimited, Inc.Stabilization of Electrodynamic TethersResultsTether Configuration Feedback: Figure 3 comparesresults for the tether in-plane libration angle andthe total kinetic energy in the tether oscillationsfor simulations with and without the feedbackcontrol. The top two traces show that, with nofeedback control, the in-plane libration growsrapidly, exceeding the critical angle of 45°within three days. Simulations using only thetether configuration feedback demonstrated thatit performed very well for stabilizing the transverseand skip-rope modes, but it did not preventa slow growth of the in-plane libration.Conversely, use of the in-plane feedback only,shown in the third pair of traces, stabilizes thelibration mode, but excites the higher ordermodes. To address this, we combined the tetherconfiguration feedback with the in-plane librationfeedback by simply superimposing themodulation gains. The bottom pair of tracesshow that this combination is very successful at stabilizingboth the libration and the transverse oscillationinstabilities.Endmass Acceleration Feedback: Figure 4 shows acomparison of simulation results with no feedback,with only the endmass acceleration feedback, andwith both endmass acceleration and in-plane librationfeedback. The results indicate that when thismethod is used by itself, the tether system successfullydamps the transverse and skip-rope oscillations,but the in-plane librations still grow to instability.By superimposing this endmass accelerationbasedmodulation with current modulation basedupon the in-plane libration angle, however, we wereable to stabilize both the in-plane librations and thehigher-order modes for durations in excess of 30days.Figure 4. Simulation results for deorbit of the 3360 kg GLAST spacecraft using a Terminator Tether witha 15 kg, 10 km long tether and a 15 kg endmass, with and without feedback based on the endmass acceleration.1
Tethers Unlimited, Inc.Stabilization of Electrodynamic TethersFigure 5 shows a simulation of a full deorbit ofthe GLAST spacecraft using the tether configurationfeedback method. The feedback methodsucceeds in stabilizing both the in-plane andoscillation instabilities, and the tether librationsshow a stable, periodic behavior that is maintaineduntil the tether enters the upper atmosphere.In-PlaneAngle (deg)Out of PlaneAngle (deg)Total Energy (J)OscillationEnergy (J)Skip RopeAng. Mom.Tension (N)Perigee & ApogeeAlt. (km)40200-20-400 5 10 15 20 25 30 3540200-20-400 5 10 15 20 25 30 352000100000 5 10 15 20 25 30 35100050000 5 10 15 20 25 30 355e40-5e40 5 10 15 20 25 30 354250000 5 10 15 20 25 30 3500 5 10 15 20 25 30 35Time (days)Figure 5. Simulation of deorbit of the GLAST spacecraft, with feedback control on both oscillation modesand in-plane libration. Tether only loses stability after it enters the upper atmosphere.1
Tethers Unlimited, Inc.Stabilization of Electrodynamic TethersCONCLUSIONSThe tests conducted using the TetherSim numerical simulation tool have demonstratedthat both of the new feedback control algorithmscan succeed in stabilizing the long-term dynamicsof electrodynamic tethers. Without anyfeedback control on the tether dynamics, anelectrodynamic tether will exhibit steady growthof the in-plane libration amplitude and skipropeoscillations. When the in-plane librationamplitude nears 45°, the tether will begin to experienceslack behavior, which results in moreviolent motions and larger tension excursionswhen the tether rebounds. While the previouslyproposed method of performing damping on thein-plane libration only does succeed in preventing the growth of in-plane libration amplitude,it also tends to exacerbate the instability oftransverse and skip-rope modes. The new controlmethods performs subtle feedback to“drain” energy from the skip-rope, transverse,and in-plane librations. The simulations indicatethat it can succeed in maintaining oscillationenergies at a low level and prevent growthof skip-rope modes, without significantly degradingthe performance of the tether system.ACKNOWLEDGMENTSThis work was supported in part by aNASA/MSFC Phase I SBIR contract numberNAS8-01013, Kirk Sorenson COTR.REFERENCESBeletskii, V.V., Levin, E.M., Dynamics of Space Tether Systems,Vol. 83 in Advances in the Astronautical Sciences, 1993.Columbo, G, et al., Investigation of Electrodynamic Stabilizationand Control of Long Orbiting Tethers, Smithsonian AstrophysicalObservatory Interim Report on NASA Contract NAS8-33691, March 1981.Forward, R.L., Hoyt, R.P., Uphoff, C., “Application of the TerminatorTether Electrodynamic Drag Technology to the Deorbitof Constellation Spacecraft”, AIAA Paper 98-3491, 34thJoint Propulsion Conference, July 1998.Hoyt, R.P., Heinen, G.W., Forward, R.L., Slostad, J.T., Minor,B.M., Stabilization of Electrodynamic Space Tethers, TUI FinalReport on NASA SBIR Phase I Contract NAS8-01013, August2001.Hoyt, R.P., Forward, R.L., The Terminator Tether: A Low-Mass System for End-of-Life Deorbit of LEO Spacecraft, TethersUnlimited, Inc. Final Report on NASA/MSFC SBIR Phase IContract NAS8-98108, October 9, 1998.Hoyt, R.P., Forward, R.L., “The Terminator Tether : AutonomousDeorbit of LEO Spacecraft for Space Debris Mitigation,”38th Aerospace Sciences Meeting & Exhibit, 10-13 January2000, Reno, NV.Johnson, L, Herrmann, M., International Space Station ElectrodynamicTether Reboost Study, NASA/TM-1998-208538, ProgramDevelopment Directorate, NASA/MSFC, July 1998.Levin, E.M., "Stability of the Stationary Motions of an ElectrodynamicTether System in Orbit," Cosmic Research, 25, pp.368-376, 1987.Lorenzini, E.C., “Investigation of Electrodynamic Stabilizationand Control of Long Orbiting Tethers”, Smithsonian AstrophysicalObservatory Interim Report on Contract NAS8-33691,March 1981.Peláez, J, et al., “A New Kind Of Dynamic Instability In ElectrodynamicTethers,” Paper AAS 00-190 in AAS/AIAA SpaceFlight Mechanics Meeting, 23-26 January 2000.Peláez, J, et al., “A Two Bar Model For The Dynamics and StabilityOf Electrodynamic Tethers,” Paper AAS 00-188 inAAS/AIAA Space Flight Mechanics Meeting, 23-26 January2000.2