- Page 2:
Fuzzy Logic and Probability Applica
- Page 6:
Fuzzy Logic and Probability Applica
- Page 10:
To the memory of our colleague and
- Page 14:
Contents Foreword Lotfi A. Zadeh Fo
- Page 18:
Contents ix 5.1.1 A historical pers
- Page 22:
Contents xi 10.2.6 How can we solve
- Page 26:
Contents xiii 13.4.5 Summary 338 13
- Page 30:
Foreword Probability theory and fuz
- Page 34:
Lotfi A. Zadeh xvii event, if epsil
- Page 38:
Foreword Writing this foreword afte
- Page 42:
Preface This book is designed as a
- Page 46:
Acknowledgments Special thanks to t
- Page 50:
Parti Fundamentals JaneM. Booker 1.
- Page 54:
Chapter 1 Introduction Timothy J. R
- Page 58:
Timothy J. Ross, Jane M. Booker, an
- Page 62:
Timothy J. Ross, Jane M. Booker, an
- Page 66:
Timothy j. Ross, Jane M. Booker, an
- Page 70:
Timothy J. Ross, Jane M. Booker, an
- Page 74:
Timothy J. Ross, Jane M. Booker, an
- Page 78:
Timothy J. Ross, Jane M. Booker, an
- Page 82:
Timothy J. Ross, Jane M. Booker, an
- Page 86:
Timothy J. Ross, Jane M. Booker, an
- Page 90:
Timothy J. Ross, Jane M. Booker, an
- Page 94:
Timothy J. Ross, Jane M. Booker, an
- Page 98:
Timothy J. Ross, Jane M. Booker, an
- Page 102:
Timothy J. Ross, Jane M. Booker, an
- Page 106:
Chapter 2 Fuzzy Set Theory, Fuzzy L
- Page 110:
Timothy J. Ross and W. Jerry Parkin
- Page 114:
Timothy J. Ross and W. Jerry Parkin
- Page 118:
Timothy J. Ross and W. Jerry Parkin
- Page 122:
Timothy J. Ross and W. Jerry Parkin
- Page 126:
Timothy J. Ross and W. Jerry Parkin
- Page 130:
Timothy J. Ross and W. Jerry Parkin
- Page 134:
Timothy J. Ross and W. Jerry Parkin
- Page 138:
Timothy J. Ross and W. Jerry Parkin
- Page 142:
Timothy J. Ross and W. Jerry Parkin
- Page 146:
Timothy J. Ross and W. Jerry Parkin
- Page 150:
Timothy J. Ross and W. Jerry Parkin
- Page 154:
Timothy J. Ross and W. Jerry Parkin
- Page 158:
Chapter 3 Probability Theory Nozer
- Page 162:
Nozer D. Singpurwalla, Jane M. Book
- Page 166:
Nozer D. Singpurwalla, Jane M. Book
- Page 170:
Nozer D. Singpurwalla, Jane M. Book
- Page 174:
Nozer D. Singpurwalla, Jane M. Book
- Page 178:
Nozer D. Singpurwalla, Jane M. Book
- Page 182:
Nozer D. Singpurwalla, Jane M. Book
- Page 186:
Nozer D. Singpurwalla, Jane M. Book
- Page 190:
Nozer D. Singpurwalla, Jane M. Book
- Page 194:
Chapter 4 Bayesiart Methods Kiflibe
- Page 198:
Kimberly F. Sellers and Jane M. Boo
- Page 202:
5.3* HIGHER ORDER APPROXIMATIONS 24
- Page 206:
Kimberly F. Sellers and Jane M. Boo
- Page 210:
Kimberly F. Sellers and Jane M. Boo
- Page 214:
Kimberly F. Sellers and Jane M. Boo
- Page 218:
Kimberly F. Sellers and Jane M. Boo
- Page 222:
Chapter 5 Considerations for Using
- Page 226:
Timothy ]. Ross, Kimberly F. Seller
- Page 230:
Timothy J. Ross, Kimberly F. Seller
- Page 234:
Timothy J. Ross, Kimberly F. Seller
- Page 238:
Timothy J. Ross, Kimberly F. Seller
- Page 242:
Timothy J. Ross, Kimberly F. Seller
- Page 246:
Timothy J. Ross, Kimberly F. Seller
- Page 250:
Timothy J. Ross, Kimberly F. Seller
- Page 254:
Timothy J. Ross, Kimberly F. Seller
- Page 258:
Chapter 6 Guidelines for Eliciting
- Page 262:
M. A. Meyer, K. B. Butterfield, W.
- Page 266:
M. A. Meyer, K. B. Butterfield, W.
- Page 270:
M. A. Meyer, K. B. Butterfield, W.
- Page 274:
M. A. Meyer, K. B. Butterfield, W.
- Page 278:
M. A. Meyer, K. B. Butterfield, W.
- Page 282:
M. A. Meyer, K. B. Butterfield, W.
- Page 286:
M. A. Meyer, K. B. Butterfield, W.
- Page 290:
M. A. Meyer, K. B. Butterfield, W.
- Page 294:
M. A. Meyer, K. B. Butterfield, W.
- Page 298:
Part II Applications Timothy ]. Ros
- Page 302:
Chapter 7 Image Enhancement: Probab
- Page 306:
Aly El-Osery and Mo Jamshidi 129 al
- Page 310:
Aly El-Osery and Mo Jamshidi 131 Fi
- Page 314:
Aly El-Osery and Mo Jamshidi 133 Fi
- Page 318:
Aly El-Osery and Mo Jamshidi 135 If
- Page 322:
Aly El-Osery and Mo Jamshidi 137 Fi
- Page 326:
Aly El-Osery and Mo Jamshidi 139 Fi
- Page 330:
Aly El-Osery and Mo Jamshidi throug
- Page 334:
Aly El-Osery and Mo Jamshidi 143 wh
- Page 338:
Chapter 8 Engineering Process Contr
- Page 342:
W. Jerry Parkinson and Ronald E. Sm
- Page 346:
W. Jerry Parkinson and Ronald E. Sm
- Page 350:
W. Jerry Parkinson and Ronald E. Sm
- Page 354:
W. Jerry Parkinson and Ronald E. Sm
- Page 358:
W. Jerry Parkinson and Ronald E. Sm
- Page 362:
W. Jerry Parkinson and Ronald E. Sm
- Page 366:
W. Jerry Parkinson and Ronald E. Sm
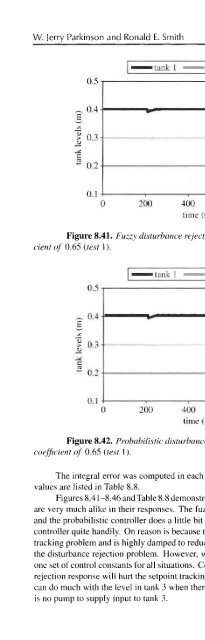
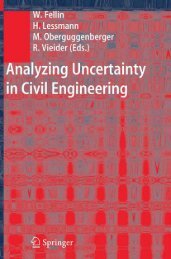
- Page 370: W. Jerry Parkinson and Ronald E. Sm
- Page 374: W. Jerry Parkinson and Ronald E. Sm
- Page 378: W. Jerry Parkinson and Ronald E. Sm
- Page 382: W. Jerry Parkinson and Ronald E. Sm
- Page 386: W. Jerry Parkinson and Ronald E. Sm
- Page 390: W. Jerry Parkinson and Ronald E. Sm
- Page 394: W. Jerry Parkinson and Ronald E. Sm
- Page 398: W. Jerry Parkinson and Ronald E. Sm
- Page 402: W. Jerry Parkinson and Ronald E. Sm
- Page 406: W. Jerry Parkinson and Ronald E. Sm
- Page 410: W. Jerry Parkinson and Ronald E. Sm
- Page 414: W. Jerry Parkinson and Ronald E. Sm
- Page 418: W. Jerry Parkinson and Ronald E. Sm
- Page 424: 188 Chapter 8. Engineering Process
- Page 428: 190 Chapters. Engineering Process C
- Page 432: This page intentionally left blank
- Page 436: 194 Chapter 9. Structural Safety An
- Page 440: 196 Chapter 9. Structural Safety An
- Page 444: 198 Chapter 9. Structural Safety An
- Page 448: 200 Chapter 9. Structural Safety An
- Page 452: 202 Chapter 9. Structural Safety An
- Page 456: 204 Chapter 9. Structural Safety An
- Page 460: 206 Chapter 9. Structural Safety An
- Page 464: 208 Chapter 9. Structural Safety An
- Page 468: 210 Chapter 9. Structural Safety An
- Page 472:
212 Chapter 9. Structural Safety An
- Page 476:
214 Chapter 9. Structural Safety An
- Page 480:
216 Chapter 9. Structural Safety An
- Page 484:
218 Chapter 9. Structural Safety An
- Page 488:
220 Chapter 10. Aircraft Integrity
- Page 492:
222 Chapter 10. Aircraft Integrity
- Page 496:
224 Chapter 10. Aircraft Integrity
- Page 500:
226 Chapter 10. Aircraft Integrity
- Page 504:
228 Chapter 10. Aircraft Integrity
- Page 508:
230 Chapter 10. Aircraft Integrity
- Page 512:
232 Chapter 10. Aircraft Integrity
- Page 516:
234 Chapter 10. Aircraft Integrity
- Page 520:
236 Chapter 10. Aircraft Integrity
- Page 524:
238 Chapter 10. Aircraft Integrity
- Page 528:
240 Chapter 10. Aircraft Integrity
- Page 532:
242 Chapter 10. Aircraft Integrity
- Page 536:
244 Chapter 11. Auto Reliability Pr
- Page 540:
246 Chapter 11. Auto Reliability Pr
- Page 544:
248 Chapter 11. Auto Reliability Pr
- Page 548:
250 Chapter 11. Auto Reliability Pr
- Page 552:
252 Chapter 11. Auto Reliability Pr
- Page 556:
254 Chapter 11. Auto Reliability Pr
- Page 560:
256 Chapter 11. Auto Reliability Pr
- Page 564:
258 Chapter 11. Auto Reliability Pr
- Page 568:
260 Chapter 11. Auto Reliability Pr
- Page 572:
This page intentionally left blank
- Page 576:
264 Chapter 12. Control Charts for
- Page 580:
266 Chapter 12. Control Charts for
- Page 584:
268 Chapter 12. Control Charts for
- Page 588:
270 Chapter 12. Control Charts for
- Page 592:
272 Chapter 12. Control Charts for
- Page 596:
274 Chapter 12. Control Charts for
- Page 600:
276 Chapter 12. Control Charts for
- Page 604:
278 Chapter 12. Control Charts for
- Page 608:
280 Chapter 12. Control Charts for
- Page 612:
282 Chapter 12. Control Charts for
- Page 616:
284 Chapter 12. Control Charts for
- Page 620:
286 Chapter 12. Control Charts for
- Page 624:
288 Chapter 12. Control Charts for
- Page 628:
290 Chapter 12. Control Charts for
- Page 632:
292 Chapter 12. Control Charts for
- Page 636:
294 Chapter 12. Control Charts for
- Page 640:
296 Chapter 12. Control Charts for
- Page 644:
298 Chapter 12. Control Charts for
- Page 648:
300 Chapter 12. Control Charts for
- Page 652:
302 Chapter 12. Control Charts for
- Page 656:
304 Chapter 12. Control Charts for
- Page 660:
306 Chapter 12. Control Charts for
- Page 664:
308 Chapter 12. Control Charts for
- Page 668:
310 Chapter 1 2. Control Charts for
- Page 672:
312 Chapter 12. Control Charts for
- Page 676:
314 Chapter 12. Control Charts for
- Page 680:
316 Chapter 12. Control Charts for
- Page 684:
318 Chapter 12. Control Charts for
- Page 688:
320 Chapter 12. Control Charts for
- Page 692:
322 Chapter 12. Control Charts for
- Page 696:
This page intentionally left blank
- Page 700:
326 Chapter 13. Fault Tree Logic Mo
- Page 704:
328 Chapter 13. Fault Tree Logic Mo
- Page 708:
330 Chapter 13. Fault Tree Logic Mo
- Page 712:
332 Chapter 13. Fault Tree Logic Mo
- Page 716:
334 Chapter 13. Fault Tree Logic Mo
- Page 720:
336 Chapter 13. Fault Tree Logic Mo
- Page 724:
338 Chapter 13. Fault Tree Logic Mo
- Page 728:
340 Chapter 13. Fault Tree Logic Mo
- Page 732:
342 Chapter 13. Fault Tree Logic Mo
- Page 736:
344 Chapter 13. Fault Tree Logic Mo
- Page 740:
346 Chapter 13. Fault Tree Logic Mo
- Page 744:
348 Chapter 14. Uncertainty Distrib
- Page 748:
350 Chapter 14. Uncertainty Distrib
- Page 752:
352 Chapter 14. Uncertainty Distrib
- Page 756:
354 Chapter 14. Uncertainty Distrib
- Page 760:
356 Chapter 14. Uncertainty Distrib
- Page 764:
358 Chapter 14. Uncertainty Distrib
- Page 768:
360 Chapter 14. Uncertainty Distrib
- Page 772:
362 Chapter 14. Uncertainty Distrib
- Page 776:
364 Chapter 14. Uncertainty Distrib
- Page 780:
366 Chapter 1 5. Signal Validation
- Page 784:
368 Chapter 15. Signal Validation U
- Page 788:
370 Chapter 1 5. Signal Validation
- Page 792:
372 Chapter 15. Signal Validation U
- Page 796:
374 Chapter 1 5. Signal Validation
- Page 800:
376 Chapter 1 5. Signal Validation
- Page 804:
378 Chapter 1 5. Signal Validation
- Page 808:
380 Chapter 15. Signal Validation U
- Page 812:
382 Chapter 15. Signal Validation U
- Page 816:
384 Chapter 15. Signal Validation U
- Page 820:
386 Chapter 15. Signal Validation U
- Page 824:
388 Chapter 15. Signal Validation U
- Page 828:
390 Chapter 15. Signal Validation U
- Page 832:
392 Chapter 15. Signal Validation U
- Page 836:
394 Index logic, 90 membership, 30
- Page 840:
396 Index fuzzy, 150-152, 157, 160,
- Page 844:
398 Index Dempster-Shafer, 8 exclud
- Page 848:
400 Index hard data, 68 hardware re
- Page 852:
402 Index of probability, 57 union,
- Page 856:
404 Index plausibility, 101 polemic
- Page 860:
406 Index definition of probability
- Page 864:
408 Index cutting, 349-352 wear, 34