- Page 2:
Fuzzy Logic and Probability Applica
- Page 6:
Fuzzy Logic and Probability Applica
- Page 10:
To the memory of our colleague and
- Page 14:
Contents Foreword Lotfi A. Zadeh Fo
- Page 18:
Contents ix 5.1.1 A historical pers
- Page 22:
Contents xi 10.2.6 How can we solve
- Page 26:
Contents xiii 13.4.5 Summary 338 13
- Page 30:
Foreword Probability theory and fuz
- Page 34:
Lotfi A. Zadeh xvii event, if epsil
- Page 38:
Foreword Writing this foreword afte
- Page 42:
Preface This book is designed as a
- Page 46:
Acknowledgments Special thanks to t
- Page 50:
Parti Fundamentals JaneM. Booker 1.
- Page 54:
Chapter 1 Introduction Timothy J. R
- Page 58:
Timothy J. Ross, Jane M. Booker, an
- Page 62:
Timothy J. Ross, Jane M. Booker, an
- Page 66:
Timothy j. Ross, Jane M. Booker, an
- Page 70:
Timothy J. Ross, Jane M. Booker, an
- Page 74:
Timothy J. Ross, Jane M. Booker, an
- Page 78:
Timothy J. Ross, Jane M. Booker, an
- Page 82:
Timothy J. Ross, Jane M. Booker, an
- Page 86:
Timothy J. Ross, Jane M. Booker, an
- Page 90:
Timothy J. Ross, Jane M. Booker, an
- Page 94:
Timothy J. Ross, Jane M. Booker, an
- Page 98:
Timothy J. Ross, Jane M. Booker, an
- Page 102:
Timothy J. Ross, Jane M. Booker, an
- Page 106:
Chapter 2 Fuzzy Set Theory, Fuzzy L
- Page 110:
Timothy J. Ross and W. Jerry Parkin
- Page 114:
Timothy J. Ross and W. Jerry Parkin
- Page 118:
Timothy J. Ross and W. Jerry Parkin
- Page 122:
Timothy J. Ross and W. Jerry Parkin
- Page 126:
Timothy J. Ross and W. Jerry Parkin
- Page 130:
Timothy J. Ross and W. Jerry Parkin
- Page 134:
Timothy J. Ross and W. Jerry Parkin
- Page 138:
Timothy J. Ross and W. Jerry Parkin
- Page 142:
Timothy J. Ross and W. Jerry Parkin
- Page 146:
Timothy J. Ross and W. Jerry Parkin
- Page 150:
Timothy J. Ross and W. Jerry Parkin
- Page 154:
Timothy J. Ross and W. Jerry Parkin
- Page 158:
Chapter 3 Probability Theory Nozer
- Page 162:
Nozer D. Singpurwalla, Jane M. Book
- Page 166:
Nozer D. Singpurwalla, Jane M. Book
- Page 170:
Nozer D. Singpurwalla, Jane M. Book
- Page 174:
Nozer D. Singpurwalla, Jane M. Book
- Page 178:
Nozer D. Singpurwalla, Jane M. Book
- Page 182:
Nozer D. Singpurwalla, Jane M. Book
- Page 186:
Nozer D. Singpurwalla, Jane M. Book
- Page 190:
Nozer D. Singpurwalla, Jane M. Book
- Page 194:
Chapter 4 Bayesiart Methods Kiflibe
- Page 198:
Kimberly F. Sellers and Jane M. Boo
- Page 202:
5.3* HIGHER ORDER APPROXIMATIONS 24
- Page 206:
Kimberly F. Sellers and Jane M. Boo
- Page 210:
Kimberly F. Sellers and Jane M. Boo
- Page 214:
Kimberly F. Sellers and Jane M. Boo
- Page 218:
Kimberly F. Sellers and Jane M. Boo
- Page 222:
Chapter 5 Considerations for Using
- Page 226:
Timothy ]. Ross, Kimberly F. Seller
- Page 230:
Timothy J. Ross, Kimberly F. Seller
- Page 234:
Timothy J. Ross, Kimberly F. Seller
- Page 238:
Timothy J. Ross, Kimberly F. Seller
- Page 242:
Timothy J. Ross, Kimberly F. Seller
- Page 246:
Timothy J. Ross, Kimberly F. Seller
- Page 250:
Timothy J. Ross, Kimberly F. Seller
- Page 254:
Timothy J. Ross, Kimberly F. Seller
- Page 258:
Chapter 6 Guidelines for Eliciting
- Page 262:
M. A. Meyer, K. B. Butterfield, W.
- Page 266:
M. A. Meyer, K. B. Butterfield, W.
- Page 270:
M. A. Meyer, K. B. Butterfield, W.
- Page 274:
M. A. Meyer, K. B. Butterfield, W.
- Page 278:
M. A. Meyer, K. B. Butterfield, W.
- Page 282:
M. A. Meyer, K. B. Butterfield, W.
- Page 286:
M. A. Meyer, K. B. Butterfield, W.
- Page 290:
M. A. Meyer, K. B. Butterfield, W.
- Page 294:
M. A. Meyer, K. B. Butterfield, W.
- Page 298:
Part II Applications Timothy ]. Ros
- Page 302:
Chapter 7 Image Enhancement: Probab
- Page 306:
Aly El-Osery and Mo Jamshidi 129 al
- Page 310:
Aly El-Osery and Mo Jamshidi 131 Fi
- Page 314:
Aly El-Osery and Mo Jamshidi 133 Fi
- Page 318:
Aly El-Osery and Mo Jamshidi 135 If
- Page 322:
Aly El-Osery and Mo Jamshidi 137 Fi
- Page 326:
Aly El-Osery and Mo Jamshidi 139 Fi
- Page 330:
Aly El-Osery and Mo Jamshidi throug
- Page 334:
Aly El-Osery and Mo Jamshidi 143 wh
- Page 338:
Chapter 8 Engineering Process Contr
- Page 342:
W. Jerry Parkinson and Ronald E. Sm
- Page 346:
W. Jerry Parkinson and Ronald E. Sm
- Page 350:
W. Jerry Parkinson and Ronald E. Sm
- Page 354:
W. Jerry Parkinson and Ronald E. Sm
- Page 358:
W. Jerry Parkinson and Ronald E. Sm
- Page 362:
W. Jerry Parkinson and Ronald E. Sm
- Page 366:
W. Jerry Parkinson and Ronald E. Sm
- Page 370:
W. Jerry Parkinson and Ronald E. Sm
- Page 374:
W. Jerry Parkinson and Ronald E. Sm
- Page 378:
W. Jerry Parkinson and Ronald E. Sm
- Page 382:
W. Jerry Parkinson and Ronald E. Sm
- Page 386:
W. Jerry Parkinson and Ronald E. Sm
- Page 390:
W. Jerry Parkinson and Ronald E. Sm
- Page 394:
W. Jerry Parkinson and Ronald E. Sm
- Page 398:
W. Jerry Parkinson and Ronald E. Sm
- Page 402:
W. Jerry Parkinson and Ronald E. Sm
- Page 406:
W. Jerry Parkinson and Ronald E. Sm
- Page 410:
W. Jerry Parkinson and Ronald E. Sm
- Page 414:
W. Jerry Parkinson and Ronald E. Sm
- Page 418:
W. Jerry Parkinson and Ronald E. Sm
- Page 422:
W. Jerry Parkinson and Ronald E. Sm
- Page 426:
W. Jerry Parkinson and Ronald E. Sm
- Page 430:
W. Jerry Parkinson and Ronald E. Sm
- Page 434:
Chapter 9 Structural Safety Analysi
- Page 438:
Major effects Major failure modes
- Page 442:
Timothy J. Ross and Jonathan L. Luc
- Page 446:
Timothy J. Ross and Jonathan L. Luc
- Page 450:
Timothy J. Ross and Jonathan L. Luc
- Page 454:
Timothy J. Ross and Jonathan L. Luc
- Page 458:
Timothy J. Ross and Jonathan L. Luc
- Page 462:
Timothy J. Ross and Jonathan L. Luc
- Page 466:
Timothy j. Ross and Jonathan L. Luc
- Page 470:
Timothy J. Ross and Jonathan L. Luc
- Page 474:
Timothy J. Ross and Jonathan L. Luc
- Page 478:
Timothy J. Ross and Jonathan L. Luc
- Page 482:
Timothy J. Ross and Jonathan L. Luc
- Page 486:
Chapter 10 Aircraft Integrity and R
- Page 490:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 494:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 498:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 502:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 506:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 510:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 514:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 518:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 522:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 526:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 530:
C. Ferregut, R. A. Osegueda, Y. Men
- Page 534:
Chapter 11 Auto Reliability Project
- Page 538:
Jane M. Booker and Thomas R. Bement
- Page 542:
Jane M. Booker and Thomas R. Bement
- Page 546:
Jane M. Booker and Thomas R. Bement
- Page 550:
Jane M. Booker and Thomas R. Bement
- Page 554:
Jane M. Booker and Thomas R. Bement
- Page 558:
Jane M. Booker and Thomas R. Bement
- Page 562:
Jane M. Booker and Thomas R. Bement
- Page 566:
Jane M. Booker and Thomas R. Bement
- Page 570:
Jane M. Booker and Thomas R. Bement
- Page 574:
Chapter 12 Control Charts for Stati
- Page 578:
W. Jerry Parkinson and Timothy J. R
- Page 582:
W. Jerry Parkinson and Timothy J. R
- Page 586:
W. jerry Parkinson and Timothy J. R
- Page 590:
W. Jerry Parkinson and Timothy J. R
- Page 594:
W. Jerry Parkinson and Timothy J. R
- Page 598:
W. Jerry Parkinson and Timothy J. R
- Page 602:
W. Jerry Parkinson and Timothy J. R
- Page 606:
W. Jerry Parkinson and Timothy J. R
- Page 610:
W. Jerry Parkinson and Timothy J. R
- Page 614:
W. Jerry Parkinson and Timothy J. R
- Page 618:
W. Jerry Parkinson and Timothy J. R
- Page 622:
W. Jerry Parkinson and Timothy J. R
- Page 626:
W. Jerry Parkinson and Timothy J. R
- Page 630:
W. Jerry Parkinson and Timothy J. R
- Page 634:
W. Jerry Parkinson and Timothy J. R
- Page 638:
W. Jerry Parkinson and Timothy J. R
- Page 642:
W. Jerry Parkinson and Timothy J. R
- Page 646:
W. Jerry Parkinson and Timothy J. R
- Page 650:
W. Jerry Parkinson and Timothy J. R
- Page 654:
W. Jerry Parkinson and Timothy J. R
- Page 658:
W. Jerry Parkinson and Timothy J. R
- Page 662:
W. Jerry Parkinson and Timothy J. R
- Page 666:
W. Jerry Parkinson and Timothy J. R
- Page 670:
W. Jerry Parkinson and Timothy J. R
- Page 674:
W. Jerry Parkinson and Timothy J. R
- Page 678:
W. Jerry Parkinson and Timothy J. R
- Page 682:
W. Jerry Parkinson and Timothy J. R
- Page 686:
W. Jerry Parkinson and Timothy J. R
- Page 690:
W. Jerry Parkinson and Timothy J. R
- Page 694:
W. Jerry Parkinson and Timothy J. R
- Page 698:
Chapter 13 Fault Tree Logic Models
- Page 702:
Jonathan L. Lucero and Timothy J. R
- Page 706:
Jonathan L. Lucero and Timothy J. R
- Page 710:
Jonathan L. Lucero and Timothy J. R
- Page 714:
Jonathan L. Lucero and Timothy J. R
- Page 718:
Jonathan L. Lucero and Timothy J. R
- Page 722:
Jonathan L. Lucero and Timothy J. R
- Page 726:
Jonathan L. Lucero and Timothy J. R
- Page 730:
Jonathan L. Lucero and Timothy J. R
- Page 734: Jonathan L. Lucero and Timothy J. R
- Page 738: Jonathan L. Lucero and Timothy J. R
- Page 742: Chapter 14 Uncertainty Distribution
- Page 746: Ronald E. Smith, W. Jerry Parkinson
- Page 750: Ronald E. Smith, W. Jerry Parkinson
- Page 754: Ronald E. Smith, W. Jerry Parkinson
- Page 758: Ronald E. Smith, W. Jerry Parkinson
- Page 762: Ronald E. Smith, W. Jerry Parkinson
- Page 766: Ronald E. Smith, W. Jerry Parkinson
- Page 770: Ronald E. Smith, W. Jerry Parkinson
- Page 774: Ronald E. Smith, W. Jerry Parkinson
- Page 778: Chapter 15 Signal Validation Using
- Page 782: Hrishikesh Aradhye and A. Sharif He
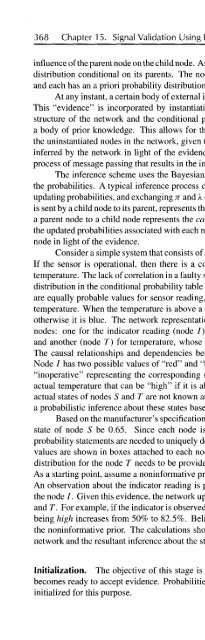
- Page 788: 370 Chapter 1 5. Signal Validation
- Page 792: 372 Chapter 15. Signal Validation U
- Page 796: 374 Chapter 1 5. Signal Validation
- Page 800: 376 Chapter 1 5. Signal Validation
- Page 804: 378 Chapter 1 5. Signal Validation
- Page 808: 380 Chapter 15. Signal Validation U
- Page 812: 382 Chapter 15. Signal Validation U
- Page 816: 384 Chapter 15. Signal Validation U
- Page 820: 386 Chapter 15. Signal Validation U
- Page 824: 388 Chapter 15. Signal Validation U
- Page 828: 390 Chapter 15. Signal Validation U
- Page 832: 392 Chapter 15. Signal Validation U
- Page 836:
394 Index logic, 90 membership, 30
- Page 840:
396 Index fuzzy, 150-152, 157, 160,
- Page 844:
398 Index Dempster-Shafer, 8 exclud
- Page 848:
400 Index hard data, 68 hardware re
- Page 852:
402 Index of probability, 57 union,
- Page 856:
404 Index plausibility, 101 polemic
- Page 860:
406 Index definition of probability
- Page 864:
408 Index cutting, 349-352 wear, 34