

SMAD
mision espacial
mision espacial

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
34 Mission Characterization<br />
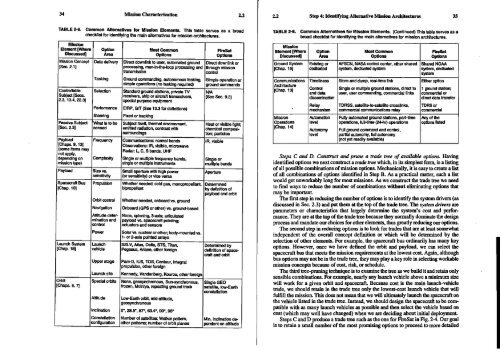
TABLE 2-6. Common Alternatives for Mission Elements. ThIs table serves as a broad<br />
checklist for Identifying the main alternatives for mission architectures.<br />
Mission<br />
Element [Where OptIon Most Common FIreSat<br />
DIscussed] Area OptIons Options<br />
MIssion Concept Data delivery Direct downnnk to user, automated ground Direct downlink or<br />
[Sec. 2.11<br />
processing, man-In-the-Joop processing and through mission<br />
transmission<br />
control<br />
Tasking Ground commanding, autonomous tasking, Simple operation or<br />
simple operations (no tasking required) ground commands<br />
ControDable Selection Standard ground stations, private TV NlA<br />
Subject [Sees. receivers, ship or aircraft transceivers, [See Sec. 9.31<br />
2.3, 13.4, 22.31 special purpose equipment<br />
Performance<br />
Steering<br />
EIRP, G/T (See 13.3 for definitions)<br />
fixed or tracking<br />
Passive Subject What is to be Subject itseH, thermal environment, Heat or visible nght;<br />
[Sec. 2.31 sensed em/Ued radiation, contrast with chemical composisurroundings<br />
tion;particles<br />
Payload Frequency Communlcalions: normal bands IR, visible<br />
[Chaps. 9, 131<br />
Observations: IR, visible, microwave<br />
(some llems may<br />
Radar: L, C, S bands, UHF<br />
not apply,<br />
depending on Complexity Single or multiPle frequency bands, Single or<br />
mission type) single or multIple Instruments multiple bands<br />
Payload Sizevs. SrneD aperture with high power Aperture<br />
sensitivity (or sensitivity) or vice versa<br />
Spacecraft Bus Propulsion Whether needed; cold gas, monopropellant, Determined<br />
[Chap. 10] blpropenant by definition of<br />
payload and orbit<br />
Orbit control Whether needed, onboard vs. ground<br />
Navigation<br />
Onboard (GPS or other) vs. ground-based<br />
Attitude deter- None, splnntng, 3-axis; articulated<br />
mlnatlon and payload vs. spacecraft pointing;<br />
control actuators and sensors<br />
Power<br />
Soler vs. nuclear or other; body-mounted vs.<br />
1- or 2-axis pointed arrays<br />
Launch System Launch SSLV, Atlas, Della, STS, Titan, Datarmined by<br />
[Chap. 181 vehicle Pegasus, Ariane, other foreign definition of spacecraft<br />
and orbit<br />
Upper stage Pam-D, IUS, TOS, Centaur, integral<br />
propulsion, other foreign<br />
Launch site<br />
Kennedy, Vandenberg, Kourou, other foreign<br />
Orbit Special orbits None, geosynchronous, Sun-synchronous, SlngleGEO<br />
[Chaps. 6, 7] frozen, Molnlye, repeating ground track satellite, lOw-Earth<br />
consteDation<br />
Altitude Low-Earth orbit, mlcl-altitude,<br />
geosynchronous<br />
Inclination 0°,28.5°,57",63.4°,90°,98"<br />
Constellation Number of sateDites; Walker pattem, Min. inclination deconfiguration<br />
other patterns; number of orbit planes pendent on altitude<br />
2.2 Step 4: Identifying Alternative Mission Architectures 35<br />
TABLE 2-6. Common Alternatives for Mission Elements. (Continued) This table serves as a<br />
broad checklist for identifying the main alternatives for mission architectures.<br />
Mission<br />
Element [Where OptIon Most Common FlreSat<br />
Discussed] Area OptIons Options<br />
Ground System ExIsting or AFSCN, NASA control center, other shared Shared NOAA<br />
[Chap. 15) dedicated system, dedicated systam system, dedicated<br />
system<br />
Communications T1mefiness Store and dump, real-time fink EIther option<br />
ArchItecture<br />
[Chap. 13) Control Single or multiPle ground stations, direct to 1 ground station;<br />
anddeta user, user commanding, commercial finks commercial or<br />
dissemination<br />
direct date transfer<br />
Relay TDRSS, satellite-to-sateOite crossnnks, TORS or<br />
.<br />
mechanism commercial communications relay commercial<br />
Mission Automation Fully automated ground stations, part-time Any of the<br />
Operetions level operations, fuD-tIme (24-11r) operations options itsted<br />
[Chap. 14)<br />
Autonomy<br />
level<br />
FuR ground command and control,<br />
parllal autonomy, fuR autonomy<br />
(not yet readily avaDable)<br />
Steps C and D. Construct and prune a trade !Tee. of. av~ilable optio~. ~~g<br />
identified options we next construct a trade tree which, m Its snnplest form, 18 a listing<br />
of all possible combinations of mission options. Mechanically, i~ is easy to create a ~<br />
of all combinations of options identified in Step B. As a practical matter, such a list<br />
would get unworkably long for most missions. As we construct the trade tree we need<br />
to find ways to reduce the number of combinations without eliminating options that<br />
may be important<br />
The first step in reducing the number of options is to identify the system drivers (as<br />
discussed in Sec. 2.3) and put them at the top of the trade tree. The system drivers are<br />
parameters or characteristics that largely determine the system's cost and performance.<br />
They are at the top of the trade tree because they normally dominate the design<br />
process and mandate our choices for other elements, thus greatly reducing our options.<br />
The second step in reducing options is to look for trades that are at least somewhat<br />
independent of the overall concept definition or which will ~ d~termined by the<br />
selection of other elements. For example, the spacecraft bus ordinarily has many key<br />
options. However, once we have defined the orbit and payload, we can select the<br />
spacecraft bus that meets the mission requirements at the lowest cost. Again, although<br />
bus options may not be in the trade tree, they may playa key role in selecting workable<br />
mission concepts because of cost, risk, or schedule.<br />
The third tree-pruning technique is to examine the tree as we build it and retain only<br />
sensible combinations. For example, nearly any launch vehicle above a minimum size<br />
will work for a given orbit imd spacecraft. Because cost is the main launch-vehicle<br />
trade, we should retain in the trade tree only the lowest-cost launch vehicle that will<br />
fulfill the mission. This does not mean that we will ultimately launch the spacecraft on<br />
the vehicle listed in the trade tree. Instead, we should design the spacecraft to be compatible<br />
with as many launch vehicles as pOssible and then select the vehicle based on<br />
cost (which may well have changed) when we are deciding about initial deployment<br />
Steps C and D produCe a trade tree such as the one for F"rreSat in Fig. 2-4. Our ~oaI<br />
is to retain a small number of the most promising options to proceed to more detailed