Senior Design Expo 2019
The Senior Design Expo, held annually in May at Columbia University, is an opportunity for Columbia Engineering students to showcase what they have learned in their foundational math and science courses together with their engineering courses in innovative, creative, and purposeful designs and prototypes. Each year the Expo showcases more than 60 projects across all nine departments. Projects have included cutting-edge robotics, the New York City subway system, language technology, proposals for bridges to span the Hudson river, and much more.
The Senior Design Expo, held annually in May at Columbia University, is an opportunity for Columbia Engineering students to showcase what they have learned in their foundational math and science courses together with their engineering courses in innovative, creative, and purposeful designs and prototypes. Each year the Expo showcases more than 60 projects across all nine departments. Projects have included cutting-edge robotics, the New York City subway system, language technology, proposals for bridges to span the Hudson river, and much more.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Dual-Axis Interactive Base<br />
Chris Bhim, Marielle Jones, Luis Perez,<br />
Neel Singal<br />
Advisor: Dr. David Vallancourt<br />
We commenced our project by fabricating a dualaxis<br />
solar tracker. The fabricated solar tracker can<br />
be seen below in figure 1. 1 Subsequently, the<br />
solar tracker was modified to be able to tilt<br />
accordingly, allow a dropped ball to hit the<br />
surface, and hit a moving target.<br />
We removed the solar cell and the photodiodes<br />
but kept the Arduino shield that allowed us to<br />
control the two 9g servos. We also cut and placed<br />
a layer of plexi glass on the surface of the dual<br />
axis base. The plexi glass allowed us to elastically<br />
bounce balls off of the surface. As shown in<br />
figure 2, one servo allowed us to control the<br />
horizontal rotation of our base while the second<br />
servo controlled the vertical rotation. These<br />
angles could be acutely tuned using a<br />
microcontroller and corresponding shield. We<br />
determined the optimal vertical rotation angle<br />
through trial and error. Using a camera and<br />
OpenCV on python, we were able to track the<br />
trajectory of a moving target circling our base and<br />
determine the appropriate angle of horizontal<br />
rotation. 2<br />
To simplify our calculations, we ensured that the<br />
ball was being dropped from a predetermined<br />
height to allow for a constant acceleration and<br />
hence consistent collision velocity. To achieve<br />
this, we build a scaffold over our base. We then<br />
used a cylindrical funnel attached to a piece of<br />
plywood with a circular hole drilled into it.<br />
Subsequently, we placed a cylindrical funnel<br />
underneath the hole to ensure that the ball would<br />
have a consistent trajectory (refer to figure 3).<br />
Additionally, we developed some interactive,<br />
carnival-like games.<br />
References<br />
[1] Zimmerman, J. (2017). Dual Axis "Smart"<br />
Solar Tracker 2.0. BrownDogGadgets. Retrieved<br />
April 9, <strong>2019</strong>, from<br />
https://browndoggadgets.dozuki.com/Guide/Du<br />
al Axis Solar Tracker 2.0/14.<br />
[2] Rosebrock, A. (2015). Ball Tracking with<br />
OpenCV. Pyimagesearch. Retrieved April 9,<br />
<strong>2019</strong>, from<br />
https://www.pyimagesearch.com/2015/09/14/b<br />
all-tracking-with-opencv/.<br />
[3] Frazier, G., Taddiken, A., Seabaugh, A., &<br />
Randall, J. (1993). Nanoelectronic Circuits<br />
Using Resonant Tunneling Transistors and<br />
Diodes. Texas Instruments Inc.<br />
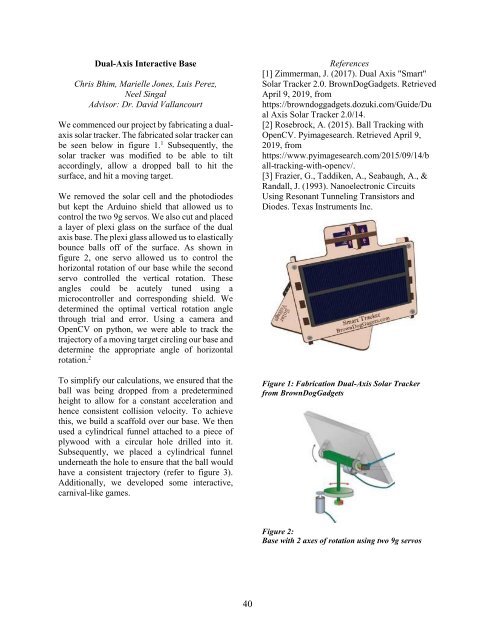
Figure 1: Fabrication Dual-Axis Solar Tracker<br />
from BrownDogGadgets<br />
Figure 2:<br />
Base with 2 axes of rotation using two 9g servos<br />
40