

Mad City Labs Catalog of Nanopositioning Systems ...
Mad City Labs Catalog of Nanopositioning Systems ...
Mad City Labs Catalog of Nanopositioning Systems ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Precision<br />
Newly developed tests show that <strong>Mad</strong> <strong>City</strong> <strong>Labs</strong> closed<br />
loop nanopositioning systems are capable <strong>of</strong> providing<br />
picometer level positioning. Position noise, the lower<br />
limit on controllable motions, can be thought <strong>of</strong> as<br />
the true positioning resolution <strong>of</strong> a nanopositioning<br />
system. Position noise is the sum <strong>of</strong> all unwanted<br />
(but unavoidable) noise in the complete system - the<br />
electronic control system as well as the position sensors<br />
inside the stage. While the overall concept is simple,<br />
actual experimental determination <strong>of</strong> picometer level<br />
position noise requires an indirect approach. <strong>Mad</strong><br />
<strong>City</strong> <strong>Labs</strong>’ test procedure uses the nanopositioner’s own<br />
internal position sensors to provide the necessary noise<br />
data. Since the internal piezoresistive position sensors<br />
provide analog signals which track the real-time position<br />
<strong>of</strong> the stage, it is possible to compare a calibrated motion<br />
created by a reference signal to the general background<br />
resulting from system noise. An FFT plot <strong>of</strong> the position<br />
sensor signal clearly shows a spike which matches the<br />
frequency <strong>of</strong> the sinewave reference input and low<br />
amplitude background noise which is the summation<br />
<strong>of</strong> all system noise sources. Since the amplitude <strong>of</strong> the<br />
reference signal is known, the amplitude <strong>of</strong> the position<br />
noise can be easily computed.<br />
Position noise plot for the X-axis <strong>of</strong> a Nano-LP100 nanopositioning<br />
system. The reference sinewave input is 3.5nm peakto-peak<br />
at 7 Hz, the noise fl oor is 0.03nm (30 picometers).<br />
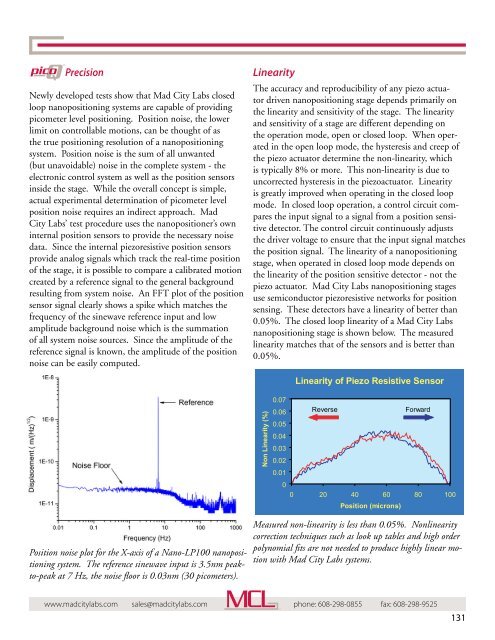
Linearity<br />
The accuracy and reproducibility <strong>of</strong> any piezo actuator<br />
driven nanopositioning stage depends primarily on<br />
the linearity and sensitivity <strong>of</strong> the stage. The linearity<br />
and sensitivity <strong>of</strong> a stage are different depending on<br />
the operation mode, open or closed loop. When operated<br />
in the open loop mode, the hysteresis and creep <strong>of</strong><br />
the piezo actuator determine the non-linearity, which<br />
is typically 8% or more. This non-linearity is due to<br />
uncorrected hysteresis in the piezoactuator. Linearity<br />
is greatly improved when operating in the closed loop<br />
mode. In closed loop operation, a control circuit compares<br />
the input signal to a signal from a position sensitive<br />
detector. The control circuit continuously adjusts<br />
the driver voltage to ensure that the input signal matches<br />
the position signal. The linearity <strong>of</strong> a nanopositioning<br />
stage, when operated in closed loop mode depends on<br />
the linearity <strong>of</strong> the position sensitive detector - not the<br />
piezo actuator. <strong>Mad</strong> <strong>City</strong> <strong>Labs</strong> nanopositioning stages<br />
use semiconductor piezoresistive networks for position<br />
sensing. These detectors have a linearity <strong>of</strong> better than<br />
0.05%. The closed loop linearity <strong>of</strong> a <strong>Mad</strong> <strong>City</strong> <strong>Labs</strong><br />
nanopositioning stage is shown below. The measured<br />
linearity matches that <strong>of</strong> the sensors and is better than<br />
0.05%.<br />
Linearity <strong>of</strong> Piezo Resistive Sensor<br />
0<br />
0 20 40 60 80 100<br />
Position (microns)<br />
Measured non-linearity is less than 0.05%. Nonlinearity<br />
correction techniques such as look up tables and high order<br />
polynomial fi ts are not needed to produce highly linear motion<br />
with <strong>Mad</strong> <strong>City</strong> <strong>Labs</strong> systems.<br />
www.madcitylabs.com sales@madcitylabs.com phone: 608-298-0855 fax: 608-298-9525<br />
Non Linearity (%)<br />
0.07<br />
0.06<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
Reverse Forward<br />
131









