Design and Implementation of Object-Oriented ... - Automatic Control
Design and Implementation of Object-Oriented ... - Automatic Control
Design and Implementation of Object-Oriented ... - Automatic Control

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 2. Modeling Techniques<br />
• Send the modeler back to the step 1 to resolve the problem with<br />
pen <strong>and</strong> paper, reformulating the model into an equivalent index 1<br />
problem.<br />
• Build the capacity <strong>of</strong> recognizing <strong>and</strong> resolving high index problems<br />
into the modeling tool.<br />
Because Modelica is designed as a multi-domain modeling tool, it has to<br />
support automatic index h<strong>and</strong>ling. This does not mean that automatic<br />
index reduction is the silver bullet that solves all high index problems in<br />
the best possible way. There are a few exceptions when manual derivation<br />
<strong>of</strong> an index 1 problem is preferable to the automatic procedure. This<br />
is the case when the automatic procedure gives results with numerical<br />
disadvantages, at least with the current version <strong>of</strong> the Modelica language<br />
<strong>and</strong> the index reduction algorithms in the Dymola tool. Examples <strong>of</strong> these<br />
rare cases are presented in Chapter 4. But independent <strong>of</strong> an automatic<br />
h<strong>and</strong>ling, model users have to underst<strong>and</strong> the implications <strong>of</strong> high index<br />
problems in order to provide the right initial conditions.<br />
Partial Differential Equations<br />
Partial differential equations (PDE) are the mathematical formulations<br />
that permits the highest level <strong>of</strong> detail for system level models. They<br />
provide the tool corresponding to the magnifying glass with the highest<br />
magnification power. PDEs form an essential part <strong>of</strong> the mathematical<br />
description <strong>of</strong> physical systems depending on space <strong>and</strong> time. They arise<br />
in a large number <strong>of</strong> modeling applications, but are not that common in<br />
systems level modeling. The reason for this is that PDE can have widely<br />
differing properties <strong>and</strong> that they are much more difficult to deal with<br />
numerically than ODEs. Using PDE for dynamical systems means that<br />
we have at least one more independent variable apart from time. Usually<br />
these are spatial coordinates, but variables can also be distributed in other<br />
dimensions like particle sizes in crystallization processes.<br />
Numerical solutions to PDE for design calculations are used in almost<br />
all engineering disciplines <strong>and</strong> are established as independent research<br />
areas, e. g., Computational Fluid Dynamics (CFD) <strong>and</strong> Finite Element<br />
Methods (FEM).<br />
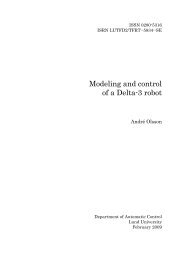
Consider a set <strong>of</strong> PDEs expressed over the solution domain Ω which is<br />
a compact region in IR m+1 <strong>and</strong> its boundary δ Ω ∈ IR m , compare Figure 2.3<br />
for a two-dimensional example. If the independent variables are separated<br />
into time t <strong>and</strong> a vector <strong>of</strong> spatial variables x, then the dependent variables<br />
u can be written as<br />
u = u(x, t)<br />
where u ∈ IR n , x ∈ IR m <strong>and</strong> t ∈ IR ≥ 0. In mathematical texts the independent<br />
space <strong>and</strong> time variables are usually treated alike, here Ω is used<br />
30