UML for Embedded Systems III. Detailed Design - Eurecom
UML for Embedded Systems III. Detailed Design - Eurecom
UML for Embedded Systems III. Detailed Design - Eurecom

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
slide 2<br />
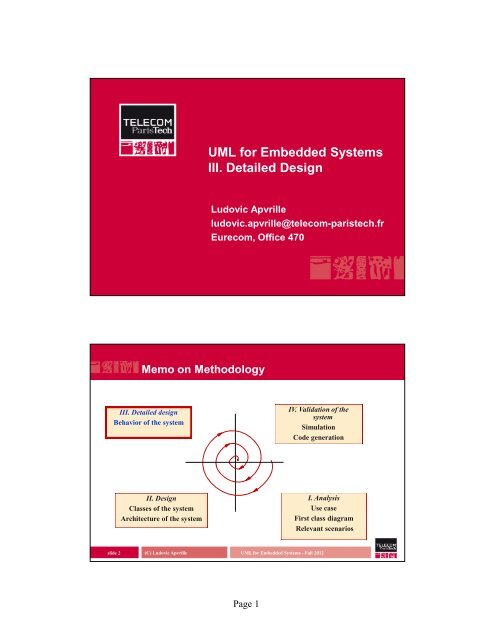
Memo on Methodology<br />
<strong>III</strong>. <strong>Detailed</strong> design<br />
Behavior of the system<br />
II. <strong>Design</strong><br />
Classes of the system<br />
Architecture of the system<br />
<strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong><br />
<strong>III</strong>. <strong>Detailed</strong> <strong>Design</strong><br />
Ludovic Apvrille<br />
ludovic.apvrille@telecom-paristech.fr<br />
<strong>Eurecom</strong>, Office 470<br />
Page 1<br />
IV. Validation of the<br />
system<br />
Simulation<br />
Code generation<br />
I. Analysis<br />
Use case<br />
First class diagram<br />
Relevant scenarios<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 3<br />
slide 4<br />
<strong>Detailed</strong> <strong>Design</strong> Stage<br />
� Purpose<br />
• <strong>Design</strong> the behavior of classes<br />
� State machine diagrams<br />
• Signal sending<br />
• Signal receiving<br />
• Composite states<br />
• Loop, tests<br />
• Setting and use of variables<br />
• Etc.<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
<strong>Detailed</strong> <strong>Design</strong><br />
� Basics of automata<br />
� Modeling objects with states machines<br />
� <strong>UML</strong> state machine diagram<br />
� TAU G2 state machines<br />
� Examples<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 2
slide 5<br />
slide 6<br />
Basics of Automata<br />
� Definition<br />
• Machines whose input behavior is not only a direct<br />
consequence of the current input, but of some past<br />
history of its input<br />
� Characterized by an internal state<br />
• Current state = past experience<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Example of State Machine Diagrams<br />
LampOff<br />
on() off()<br />
lampOn<br />
Page 3<br />
Start state<br />
States<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Trigger
Output and Actions<br />
� Actions can be generated<br />
either at state entrance,<br />
exit or at trigger level<br />
slide 8<br />
Use of Variables<br />
LampOff<br />
on()/ctr = ctr+1; off()<br />
lampOn<br />
Page 4<br />
LampOff<br />
on()/print("on"); off()<br />
lampOn<br />
Mealy automaton<br />
Integer ctr;<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 9<br />
slide 10<br />
Mealy Machines<br />
� Mealy machines<br />
• Hopcroft and Ullman (1979, 42), Salomaa (1973, 31)<br />
• Finite-state machines<br />
- Take a string on an input alphabet<br />
- Producing a string of equal length on an output alphabet.<br />
� Formally, a Mealy machine is a six-tuple<br />
M = (Q, Σ, Γ, δ, λ, q 1)<br />
• where<br />
- Q = (q 1, q 2, …, q |Q|) is a finite set of states;<br />
- Σ = (σ 1, σ 2, …, σ |Σ|) is a finite input alphabet;<br />
- Γ = (γ 1, γ 2, …, γ |Γ|) is a finite output alphabet;<br />
- δ : Q x Σ → Q is the next-state function, such that a machine in state q j, after reading symbol σ k,<br />
moves to state δ(q j, σ k) ∈ Q<br />
- λ : Q x Σ → Γ is the output function, such that a machine in state q j, after reading symbol σ k,<br />
writes symbol λ(q j, σ k) ∈ Γ ; and<br />
- q 1 ∈ Q is the initial state in which the machine is found be<strong>for</strong>e the first symbol of a string is<br />
processed<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Example<br />
� Let M = (Q, Σ, Γ, δ, λ, q1) with<br />
• Q = {q1, q2} • Σ = {sig1, sig2}<br />
• Γ = {out1, out2}<br />
• δ(q1, sig1) = q1; δ(q1, sig2) = q2;<br />
• δ(q2, sig1) = q2; δ(q2, sig2) = q1;<br />
• λ(q1, sig1) = out1; λ(q1, sig2) = out2;<br />
• λ(q2, sig1) = out2; λ(q2, sig2) = out1;<br />
� Propose a graphical representation of this machine<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 5
slide 11<br />
slide 12<br />
<strong>Detailed</strong> <strong>Design</strong><br />
� Basics of automata<br />
� Modeling objects with states machines<br />
� <strong>UML</strong> state machine diagram<br />
� TAU G2 state machines<br />
� Examples<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
What Can be Modeled with State<br />
Machines?<br />
� State machines are well-suited <strong>for</strong> the modeling of eventdriven<br />
and discrete behavior<br />
� Inappropriate <strong>for</strong> modeling continuous behavior<br />
threshold<br />
� Are State Machines well-suited <strong>for</strong> modeling real-time and<br />
embedded systems?<br />
• What is an event-driven systems?<br />
• What are real-time and embedded systems?<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 6<br />
time
slide 13<br />
slide 14<br />
Event-Driven Behavior<br />
� Event = a type of observable occurrence<br />
• Interactions<br />
- Invocation of object operations is synchronous (call event)<br />
- Receiving of asynchronous signal (signal event)<br />
• Occurrence of time instants (time event)<br />
- Interval expiry<br />
- Calendar/clock time<br />
• Change in value of some entity (change event)<br />
� Event Instance = an instance of an event (type)<br />
• Occurs at a particular time instant and has no duration<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
<strong>Embedded</strong> <strong>Systems</strong>’ Architecture<br />
� <strong>Embedded</strong> system = controlling system + controlled<br />
system + environment<br />
Sensors Sensors<br />
Controlling<br />
System<br />
Controlled<br />
System<br />
Page 7<br />
Sensors Sensors Actuators<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Interface
Synchronous<br />
Asynchronous<br />
slide 15<br />
Single event<br />
Multiple event<br />
slide 16<br />
Response to External Events<br />
Event<br />
(Input)<br />
External Hostile<br />
Environment<br />
<strong>Embedded</strong><br />
System<br />
Page 8<br />
Response<br />
(Output)<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
What is a Real-Time System?<br />
Synchronous<br />
Asynchronous<br />
Single event<br />
Multiple event<br />
� Real-Time <strong>Systems</strong> have been defined as:<br />
“Those systems in which the correctness of the<br />
system depends not only on the logical results of the<br />
computation, but also on the time at which the results<br />
are produced”<br />
(J. Stankovic, “Misconceptions About Real-Time<br />
Computing”, IEEE Computer, 21(10), October 1988)<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 17<br />
slide 18<br />
Jobs and Tasks<br />
� Task<br />
• A task is a set of related jobs joined to provide functions<br />
� Job<br />
• A job is a unit of work, scheduled and executed by the<br />
system<br />
� Parameters<br />
• Temporal behavior<br />
- Last less than 20ms, periodic task i.e. executes every 30 ms<br />
• Functional: intrinsic properties of the job<br />
- Taps of filter<br />
• Resource requirements<br />
- 10kb of memory<br />
• Interconnection: its communication with other jobs<br />
- The decoding job must send its result to the displaying job<br />
- May use shared memory, message queues, etc.<br />
Synchronous<br />
Asynchronous<br />
Single event<br />
Multiple event<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Response to External Events<br />
Event<br />
(Input)<br />
Timing<br />
Constraints<br />
Real Real-Time Time<br />
System<br />
Page 9<br />
Response<br />
(Output)<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Synchronous<br />
Asynchronous<br />
Single event<br />
Multiple event
slide 19<br />
slide 20<br />
Are State Machines Well-Suited <strong>for</strong> Modeling<br />
Real-Time and embedded <strong>Systems</strong>?<br />
� What do you think?<br />
� What should be modeled with state machines?<br />
• In principle, anything that manifests event-driven behavior<br />
• In practice:<br />
- The behavior of individual objects<br />
- Object interactions<br />
� The dynamic semantics of <strong>UML</strong> state machines are<br />
currently mainly specified <strong>for</strong> the case of active<br />
objects<br />
� Note: currently, there is no support in <strong>UML</strong> <strong>for</strong><br />
modeling continuous behavior<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Object Behavior: General Model<br />
Initialization<br />
Waiting <strong>for</strong> input<br />
Computing input<br />
Sending output<br />
Termination<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 10<br />
Note: this is not a<br />
<strong>UML</strong> state<br />
machine but<br />
rather a flowchart<br />
to explain how an<br />
object generally<br />
behaves
slide 21<br />
slide 22<br />
Example<br />
Initialization<br />
Waiting <strong>for</strong> input<br />
Computing input<br />
Sending output<br />
Termination<br />
Page 11<br />
LampOff<br />
on()/print(on); off()<br />
lampOn<br />
stopLamp()<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Active and Passive Objects<br />
� An active object is a thread of control of the<br />
application<br />
• Autonomous<br />
• No internal concurrency<br />
• Mechanisms <strong>for</strong> storing input data<br />
� A passive object is an object which is not active<br />
• It is activated by external power<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 23<br />
slide 24<br />
Object Behavior: Active Objects<br />
Initialization<br />
Waiting <strong>for</strong> input<br />
Computing input<br />
Sending output<br />
Termination<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Object Behavior: Passive Objects<br />
Initialization<br />
Waiting <strong>for</strong> input<br />
Computing input<br />
Sending output<br />
Termination<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 12
slide 25<br />
slide 26<br />
Passive Objects: Synchronization Issues<br />
Synchronization<br />
may be<br />
required!<br />
Initialization<br />
Waiting <strong>for</strong> input<br />
Computing input<br />
Sending output<br />
Termination<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
V. <strong>Detailed</strong> <strong>Design</strong><br />
� Basics of automata<br />
� Modeling objects with states machines<br />
� <strong>UML</strong> state machine diagram<br />
� TAU G2 state machines<br />
� Examples<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 13
� States<br />
� Transitions<br />
slide 27<br />
Basics of <strong>UML</strong> State Machine Diagrams<br />
Message [condition] / action<br />
s1 s2<br />
� Transition with temporal<br />
in<strong>for</strong>mation<br />
when (date = 10)<br />
E1 E2<br />
slide 28<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
States, Transitions and Actions<br />
LampOn<br />
entry/lamp.on();<br />
exit/printf(“exiting”);<br />
off/printf(“to off”);<br />
LampOff<br />
entry/lamp.off();<br />
exit/printf(“exiting”);<br />
off/null<br />
Page 14<br />
after(100)<br />
E1 E2<br />
LampOff<br />
entry/lamp.off();<br />
exit/printf(“exiting”);<br />
off/printf(“needless”);<br />
Self transition<br />
entry and exit<br />
actions are<br />
ignored<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 29<br />
<strong>UML</strong> 2.x State Machines: Towards SDL<br />
state1<br />
signal1()<br />
signal2()<br />
state2<br />
Page 15<br />
Waiting <strong>for</strong><br />
the<br />
receiving<br />
of signal<br />
signal1<br />
Sending of<br />
signal<br />
signal2<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Guards<br />
LampOff<br />
entry/lamp.off();<br />
exit/printf(“exiting”);<br />
on[LampIsPlugged]/printf(“to on”);<br />
LampOn<br />
entry/lamp.on();<br />
exit/printf(“exiting”);<br />
x = 5<br />
state2<br />
state1<br />
signal1()<br />
x = x +1;<br />
signal2()<br />
x
slide 31<br />
slide 32<br />
Composite States: Hierarchical State<br />
Machines<br />
State1<br />
State2.1<br />
State2.1<br />
State2.2<br />
H<br />
Page 16<br />
State3<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Order of Actions<br />
S1<br />
exit/exS1<br />
S11<br />
exit/exS11<br />
E/actE<br />
Execution sequence when E:<br />
H<br />
H*<br />
S2<br />
entry/enS2<br />
initS2<br />
S21<br />
entry/enS21<br />
exS11 � exS1 � actE � enS2 � initS2 � enS21<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Swallow history<br />
Deep history
slide 33<br />
slide 34<br />
Orthogonal Regions<br />
oven on<br />
oven off<br />
Page 17<br />
oven light<br />
on<br />
oven light<br />
off<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Deferred Events<br />
� Events can be deferred if they cannot be computed<br />
• Saved <strong>for</strong> future use<br />
off/<br />
LampOff<br />
entry/lamp.off()<br />
off/defer<br />
LampOn<br />
on/<br />
entry/lamp.on()<br />
Event is<br />
deferred<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 35<br />
slide 36<br />
Fork and Join Transitions<br />
Child Adult Retiree<br />
Staff<br />
Member<br />
Page 18<br />
Manager<br />
age<br />
employee<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
<strong>Detailed</strong> <strong>Design</strong><br />
� Basics of automata<br />
� Modeling objects with states machines<br />
� <strong>UML</strong> state machine diagram<br />
� With TAU G2<br />
� Examples<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012
slide 37<br />
slide 38<br />
States Machines under TAU G2<br />
Deferred<br />
signal<br />
Termination of<br />
the object<br />
signal3<br />
x = 5<br />
state2<br />
signal3()<br />
state1<br />
signal1()<br />
x = x + 1;<br />
signal2()<br />
x
fromCounter<br />
slide 39<br />
slide 40<br />
Counter<br />
port1<br />
Counter<br />
<br />
Loop<br />
Integer<br />
<br />
fromCounter<br />
Loop (Integer)<br />
Statechart Diagram statemachine initialize {1/1}<br />
All transition should have a condition<br />
<strong>for</strong> being triggered<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 20<br />
Set Bell<br />
'port'<br />
Alarm<br />
slide 41<br />
slide 42<br />
Alarm Clock<br />
<br />
Bell<br />
<br />
Set<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 21<br />
waitForSet<br />
Set()<br />
set(myTimer(), now+10);<br />
waitForTimer<br />
myTimer()<br />
Bell()<br />
waitForSet<br />
Simulation of Alarm Clock<br />
sd Trace (7) Sequence diagram trace<br />
generated by Tau<br />
<strong>for</strong> Alarm<br />
interaction UseCase3 {1/1}<br />
env[1]<br />
'@Set' ()<br />
Alarm[1]<br />
waitForSet<br />
waitForTimer<br />
Bell ()<br />
waitForSet<br />
myTimer () /* 10.0000 */<br />
myTimer ()<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
statemachine initialize {1/1}<br />
timer myTimer;
slide 43<br />
slide 44<br />
Exercises: Ping-Pong Game<br />
� Two players P1 and P2<br />
� P1<br />
• Sends value k to P2<br />
• Waits <strong>for</strong> value k<br />
• Increment k<br />
• And so on..<br />
� P2<br />
• Waits <strong>for</strong> a value x<br />
• Returns x to the sender<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Microwave Oven<br />
� We wish to model a basic oven with a door and a<br />
« start » button<br />
� Once a meal has been put in the oven, the user<br />
pushes the « start » button. Once pushed, the meal<br />
is heated <strong>for</strong> 30 seconds. Then, the oven stops and<br />
plays a bell sound<br />
� Alternatively, the user may open the door while the<br />
oven is heating. In that case, the heating process<br />
stops and the 30s delay is set to 0<br />
(C) Ludovic Apvrille <strong>UML</strong> <strong>for</strong> <strong>Embedded</strong> <strong>Systems</strong> - Fall 2012<br />
Page 22<br />
« Start » button