Chapter 3 - Controllability and Observability - University of Minnesota
Chapter 3 - Controllability and Observability - University of Minnesota
Chapter 3 - Controllability and Observability - University of Minnesota

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
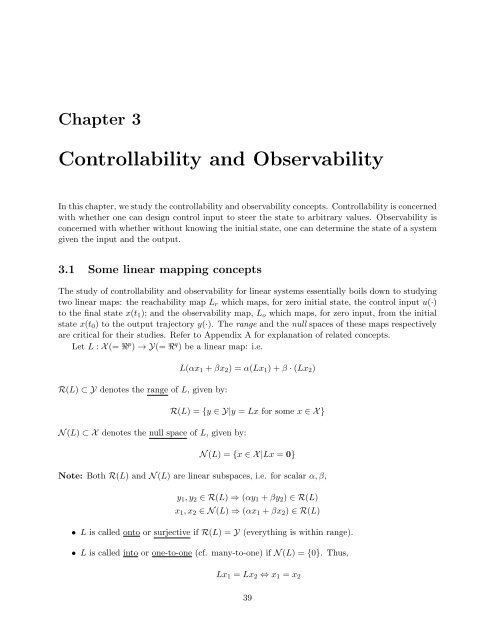
<strong>University</strong> <strong>of</strong> <strong>Minnesota</strong> ME 8281: Advanced Control Systems Design, 2001-2012 69<br />
Output<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
measured<br />
uncorrupted<br />
estimate<br />
−1.5<br />
0 1 2 3 4 5<br />
Time(sec)<br />
Figure 3.13: Least squares estimate<br />
This means that the observer gain L(t) will decrease. The observer will asymptotically rely<br />
more <strong>and</strong> more on open loop estimation:<br />
Output<br />
3<br />
2<br />
1<br />
0<br />
−1<br />
d<br />
ˆx(t|t) =A(t)ˆx(t|t)<br />
dt<br />
measured<br />
uncorrupted<br />
λ = 1.5<br />
λ = 5<br />
−2<br />
0 1 2<br />
λ = 10<br />
3 4 5<br />
Time(sec)<br />
Figure 3.14: Least squares estimate with forgetting factor
<strong>University</strong> <strong>of</strong> <strong>Minnesota</strong> ME 8281: Advanced Control Systems Design, 2001-2012 81<br />
3.15 Realization<br />
3.15.1 Transfer Function to State-space model<br />
The models <strong>of</strong> many physical systems are more conveniently obtained in the transfer function form.<br />
In order for us to implement state-space control design techniques, it is essential that we have a<br />
state-space representation. It should be noted that there is no unique state-space realization for a<br />
transfer function, since any set <strong>of</strong> states can be used. However, there are some realizations that are<br />
“canonical”, or simplest. The “first companion” or “controllable canonical” form is given here.<br />
The transfer function for a SISO system<br />
can be written<br />
H(s) =<br />
Y (s)<br />
U(s) =<br />
Using inverse Laplace transform, the D.E. is<br />
1<br />
s n + a1s n−1 + a2s n−2 + ···+ an<br />
(3.17)<br />
(s n + a1s n−1 + a2s n−2 + ···+ an)Y (s) =U(s) (3.18)<br />
D n y + a1D n−1 y + ···+ any = u D n ≡ dn<br />
dt n<br />
(3.19)<br />
Each term, starting from the second, is an integration <strong>of</strong> the preceding term. So, the relationship<br />
can be expressed as a chain <strong>of</strong> integrators, as shown in Fig. 3.17. The output <strong>of</strong> each integrator is<br />
designated a state variable, from right to left. So, the output <strong>of</strong> the n th integrator is x1, whichis<br />
the same as the system output y.<br />
u<br />
−<br />
i i i i<br />
xn<br />
xn1<br />
a1 a2 an1 an<br />
Figure 3.17: First companion form (ref: Control System Design, B. Friedl<strong>and</strong>)<br />
This can be represented as a set <strong>of</strong> n linear D.E.’s<br />
˙x1 = x2<br />
˙x2 = x2<br />
.<br />
˙xn−1 = xn<br />
˙xn = −anx1 − an−1x2 −···−a1xn + u<br />
x2<br />
x1<br />
y