

Adelantamiento con vehiculos autónomos en carreteras de doble ...
Adelantamiento con vehiculos autónomos en carreteras de doble ...
Adelantamiento con vehiculos autónomos en carreteras de doble ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Otros autores han simulado a<strong>de</strong>lantami<strong>en</strong>tos <strong>con</strong> difer<strong>en</strong>tes<br />
estrategias, como apr<strong>en</strong>dizaje reforzado <strong>con</strong> múltiple objetivo<br />
(Ngai and Yung, 2007). A<strong>de</strong>más, d<strong>en</strong>tro <strong>de</strong> nuestro grupo, un<br />
simulador <strong>de</strong>sarrollado por (Alonso et al., 2007) ha permitido<br />
verificar difer<strong>en</strong>tes estrategias <strong>de</strong> toma <strong>de</strong> <strong>de</strong>cisiones <strong>en</strong> la<br />
maniobra <strong>de</strong> a<strong>de</strong>lantami<strong>en</strong>to <strong>con</strong> tres vehículos.<br />
En el DARPA Urban Chall<strong>en</strong>ge, la competicion más importante<br />
<strong>en</strong> la <strong>con</strong>ducción <strong>de</strong> vehículos <strong>autónomos</strong> (Kammel et<br />
al., 2007), el equipo por la Universidad <strong>de</strong> Stanford logró el<br />
segundo lugar <strong>en</strong> la última edición, realizando <strong>con</strong> éxito a<strong>de</strong>lantami<strong>en</strong>tos<br />
a 48 km/h. Para ello el vehículo estaba equipado<br />
<strong>con</strong> cinco laser frontales, un GPS (sistema <strong>de</strong> posicionami<strong>en</strong>to<br />
global), cinco radares, sistemas inerciales y dos ord<strong>en</strong>adores<br />
colocados <strong>en</strong> paralelo (Motemerlo, 2008).<br />
La filosofía <strong>de</strong>l grupo AUTOPÍA es realizar maniobras <strong>de</strong> <strong>con</strong>trol<br />
<strong>de</strong> vehículos <strong>autónomos</strong> afectando lo m<strong>en</strong>os posible el <strong>en</strong>torno<br />
<strong>de</strong> trabajo, y esto también incluye a los vehículos. Usando<br />
<strong>con</strong>troladores borrosos embarcados, un GPS difer<strong>en</strong>cial y<br />
comunicación inalambrica <strong>en</strong>tre vehículos, se han <strong>de</strong>sarrollado<br />
difer<strong>en</strong>tes algoritmos, utilizando uno o dos vehículos (Milanés<br />
et al., 2009).<br />
En este trabajo se explican los procedimi<strong>en</strong>tos para hacer a<strong>de</strong>lantami<strong>en</strong>tos<br />
<strong>con</strong> tres vehículos <strong>en</strong> <strong>carreteras</strong> <strong>de</strong> dos carriles y<br />
<strong>doble</strong> s<strong>en</strong>tido <strong>con</strong> tráfico <strong>de</strong> fr<strong>en</strong>te. Los experim<strong>en</strong>tos involucran<br />
hasta tres vehículos comunicados <strong>en</strong>tre sí, el que realiza el<br />
a<strong>de</strong>lantami<strong>en</strong>to es autónomo y los otros se <strong>con</strong>duc<strong>en</strong> manualm<strong>en</strong>te.<br />
El primer experim<strong>en</strong>to <strong>con</strong>siste <strong>en</strong> un a<strong>de</strong>lantami<strong>en</strong>to<br />
simple <strong>en</strong>tre dos vehículos y los dos sigui<strong>en</strong>tes involucran a un<br />
tercer vehículo que circula <strong>en</strong> s<strong>en</strong>tido <strong>con</strong>trario. El <strong>con</strong>trolador<br />
<strong>de</strong>l vehículo autónomo valora <strong>en</strong> cada mom<strong>en</strong>to <strong>de</strong>l a<strong>de</strong>lantami<strong>en</strong>to,<br />
si éste pue<strong>de</strong> proseguir o hay que abortarlo.<br />
En la sección 2 se explica la instrum<strong>en</strong>tación <strong>de</strong> los vehículos<br />
utilizados y las pistas <strong>de</strong> pruebas. En la sección 3 se <strong>de</strong>scribe<br />
la maniobra <strong>de</strong> a<strong>de</strong>lantami<strong>en</strong>to, sus difer<strong>en</strong>tes fases, variables<br />
<strong>con</strong>si<strong>de</strong>radas y los casos <strong>de</strong> uso utilizados <strong>en</strong> los experim<strong>en</strong>tos<br />
<strong>de</strong> la sección 5. El <strong>con</strong>trolador borroso utilizado se <strong>de</strong>scribe<br />
<strong>en</strong> la sección 4. Por último, <strong>en</strong> la sección 6 se explican las<br />
<strong>con</strong>clusiones que se obti<strong>en</strong><strong>en</strong> <strong>de</strong>l trabajo realizado y se plantean<br />
las mejoras para trabajos futuros.<br />
2. VEHÍCULOS Y ENTORNO DE PRUEBAS.<br />
En este trabajo, se han utilizado tres vehículos: uno <strong>en</strong> modo<br />
autónomo y dos guiados por <strong>con</strong>ductores humanos. Es <strong>con</strong>v<strong>en</strong>i<strong>en</strong>te<br />
notar que utilizar vehículos <strong>en</strong> modo manual <strong>con</strong>fiere<br />
g<strong>en</strong>eralidad y difilculta el experim<strong>en</strong>to, ya que pue<strong>de</strong> cambiar<br />
rep<strong>en</strong>tinam<strong>en</strong>te la <strong>con</strong>signa <strong>de</strong> velocidad <strong>de</strong> éstos, haci<strong>en</strong>do que<br />
las <strong>con</strong>di<strong>con</strong>es externas sean impre<strong>de</strong>cibles. A <strong>con</strong>tinuación se<br />
<strong>de</strong>tallan las características <strong>de</strong> cada uno <strong>de</strong> los vehículos y las<br />
pistas utilizadas.<br />
2.1 Vehículo autónomo.<br />
Este vehículo es una furgoneta electrica, mo<strong>de</strong>lo Berlingo <strong>de</strong><br />
Citrö<strong>en</strong>, <strong>con</strong> baterías <strong>de</strong> níquel-cadmio separadas <strong>en</strong> cuatro bloques<br />
y distribuidas a lo largo <strong>de</strong>l chasis <strong>de</strong>l vehículo. Dispone<br />
<strong>de</strong> un sistema <strong>de</strong> dirección hidráulica y un sistema <strong>de</strong> fr<strong>en</strong>os<br />
<strong>con</strong>v<strong>en</strong>cional. La acción sobre el acelerador funciona como<br />
un pot<strong>en</strong>ciómetro que g<strong>en</strong>era un voltaje <strong>de</strong> refer<strong>en</strong>cia para el<br />
pedal <strong>de</strong>l acelerador, <strong>en</strong>tre 1 y 4 voltios. Una tarjeta digitalanalógica<br />
<strong>en</strong>vía la refer<strong>en</strong>cia <strong>de</strong> velocidad que emula la presión<br />
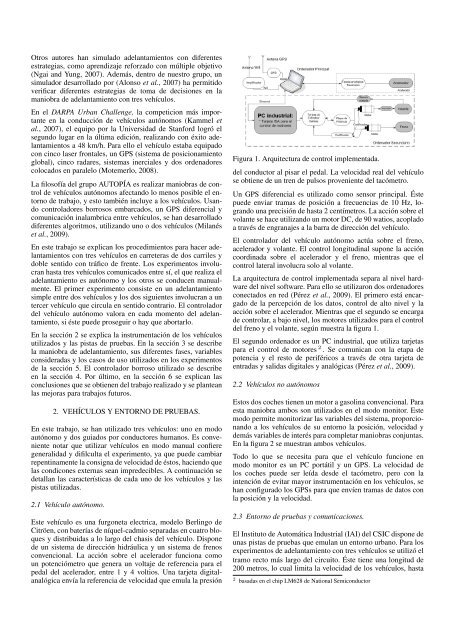
Figura 1. Arquitectura <strong>de</strong> <strong>con</strong>trol implem<strong>en</strong>tada.<br />
<strong>de</strong>l <strong>con</strong>ductor al pisar el pedal. La velocidad real <strong>de</strong>l vehículo<br />
se obti<strong>en</strong>e <strong>de</strong> un tr<strong>en</strong> <strong>de</strong> pulsos prov<strong>en</strong>i<strong>en</strong>te <strong>de</strong>l tacómetro.<br />
Un GPS difer<strong>en</strong>cial es utilizado como s<strong>en</strong>sor principal. Éste<br />
pue<strong>de</strong> <strong>en</strong>viar tramas <strong>de</strong> posición a frecu<strong>en</strong>cias <strong>de</strong> 10 Hz, logrando<br />
una precisión <strong>de</strong> hasta 2 c<strong>en</strong>tímetros. La acción sobre el<br />
volante se hace utilizando un motor DC, <strong>de</strong> 90 watios, acoplado<br />
a través <strong>de</strong> <strong>en</strong>granajes a la barra <strong>de</strong> dirección <strong>de</strong>l vehículo.<br />
El <strong>con</strong>trolador <strong>de</strong>l vehículo autónomo actúa sobre el fr<strong>en</strong>o,<br />
acelerador y volante. El <strong>con</strong>trol longitudinal supone la acción<br />
coordinada sobre el acelerador y el fr<strong>en</strong>o, mi<strong>en</strong>tras que el<br />
<strong>con</strong>trol lateral involucra solo al volante.<br />
La arquitectura <strong>de</strong> <strong>con</strong>trol implem<strong>en</strong>tada separa al nivel hardware<br />
<strong>de</strong>l nivel software. Para ello se utilizaron dos ord<strong>en</strong>adores<br />
<strong>con</strong>ectados <strong>en</strong> red (Pérez et al., 2009). El primero está <strong>en</strong>cargado<br />
<strong>de</strong> la percepción <strong>de</strong> los datos, <strong>con</strong>trol <strong>de</strong> alto nivel y la<br />
acción sobre el acelerador. Mi<strong>en</strong>tras que el segundo se <strong>en</strong>carga<br />
<strong>de</strong> <strong>con</strong>trolar, a bajo nivel, los motores utilizados para el <strong>con</strong>trol<br />
<strong>de</strong>l fr<strong>en</strong>o y el volante, según muestra la figura 1.<br />
El segundo ord<strong>en</strong>ador es un PC industrial, que utiliza tarjetas<br />
para el <strong>con</strong>trol <strong>de</strong> motores 2 . Se comunican <strong>con</strong> la etapa <strong>de</strong><br />
pot<strong>en</strong>cia y el resto <strong>de</strong> periféricos a través <strong>de</strong> otra tarjeta <strong>de</strong><br />
<strong>en</strong>tradas y salidas digitales y analógicas (Pérez et al., 2009).<br />
2.2 Vehículos no <strong>autónomos</strong><br />
Estos dos coches ti<strong>en</strong><strong>en</strong> un motor a gasolina <strong>con</strong>v<strong>en</strong>cional. Para<br />
esta maniobra ambos son utilizados <strong>en</strong> el modo monitor. Este<br />
modo permite monitorizar las variables <strong>de</strong>l sistema, proporcionando<br />
a los vehículos <strong>de</strong> su <strong>en</strong>torno la posición, velocidad y<br />
<strong>de</strong>más variables <strong>de</strong> interés para completar maniobras <strong>con</strong>juntas.<br />
En la figura 2 se muestran ambos vehículos.<br />
Todo lo que se necesita para que el vehículo funcione <strong>en</strong><br />
modo monitor es un PC portátil y un GPS. La velocidad <strong>de</strong><br />
los coches pue<strong>de</strong> ser leída <strong>de</strong>s<strong>de</strong> el tacómetro, pero <strong>con</strong> la<br />
int<strong>en</strong>ción <strong>de</strong> evitar mayor instrum<strong>en</strong>tación <strong>en</strong> los vehículos, se<br />
han <strong>con</strong>figurado los GPSs para que <strong>en</strong>ví<strong>en</strong> tramas <strong>de</strong> datos <strong>con</strong><br />
la posición y la velocidad.<br />
2.3 Entorno <strong>de</strong> pruebas y comunicaciones.<br />
El Instituto <strong>de</strong> Automática Industrial (IAI) <strong>de</strong>l CSIC dispone <strong>de</strong><br />
unas pistas <strong>de</strong> pruebas que emulan un <strong>en</strong>torno urbano. Para los<br />
experim<strong>en</strong>tos <strong>de</strong> a<strong>de</strong>lantami<strong>en</strong>to <strong>con</strong> tres vehículos se utilizó el<br />
tramo recto más largo <strong>de</strong>l circuito. Éste ti<strong>en</strong>e una longitud <strong>de</strong><br />
200 metros, lo cual limita la velocidad <strong>de</strong> los vehículos, hasta<br />
2 basadas <strong>en</strong> el chip LM628 <strong>de</strong> National Semi<strong>con</strong>ductor













