Guide de l'utilisateur - Bernard Controls
Guide de l'utilisateur - Bernard Controls
Guide de l'utilisateur - Bernard Controls

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
12<br />
13<br />
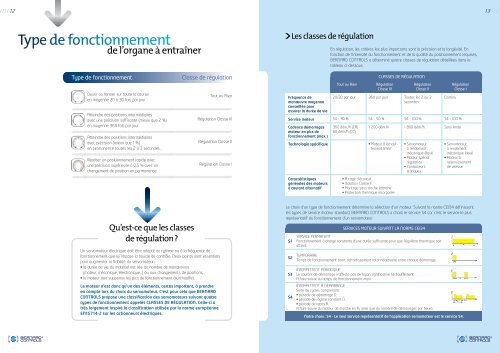
Type <strong>de</strong> fonctionnement<br />
Les classes <strong>de</strong> régulation<br />
<strong>de</strong> l’organe à entraîner<br />
En régulation, les critères les plus importants sont la précision et la longévité. En<br />
fonction <strong>de</strong> l’intensité du fonctionnement et <strong>de</strong> la qualité du positionnement requises,<br />
<strong>Bernard</strong> <strong>Controls</strong> a déterminé quatre classes <strong>de</strong> régulation détaillées dans le<br />
tableau ci-<strong>de</strong>ssous.<br />
Type <strong>de</strong> fonctionnement<br />
Ouvrir ou fermer sur toute la course<br />
en moyenne 20 à 30 fois par jour<br />
Atteindre <strong>de</strong>s positions intermédiaires<br />
avec une précision suffisante (mieux que 2 %)<br />
en moyenne 360 fois par jour.<br />
Atteindre <strong>de</strong>s positions intermédiaires<br />
avec précision (mieux que 1 %)<br />
en permanence toutes les 2 à 3 secon<strong>de</strong>s.<br />
Réaliser un positionnement rapi<strong>de</strong> avec<br />
une précision supérieure à 0,5 % avec un<br />
changement <strong>de</strong> position en permanence.<br />
Classe <strong>de</strong> régulation<br />
Tout ou Rien<br />
Régulation Classe III<br />
Régulation Classe II<br />
Régulation Classe I<br />
Fréquence <strong>de</strong><br />
manœuvre moyenne<br />
conseillée pour<br />
assurer la durée <strong>de</strong> vie<br />
Tout ou Rien<br />
Classes <strong>de</strong> régulation<br />
Régulation<br />
Classe III<br />
Régulation<br />
Classe II<br />
20/30 par jour 360 par jour Toutes les 2 ou 3<br />
secon<strong>de</strong>s<br />
Continu<br />
Régulation<br />
Classe I<br />
Service moteur S4 - 30 % S4 - 50 % S4 - 100 % S4 - 100 %<br />
Ca<strong>de</strong>nce démarrages<br />
moteur en pics <strong>de</strong><br />
fonctionnement (max.)<br />
Technologie spécifique<br />
360 dém./h (CA)<br />
60 dém./h (CC)<br />
1 200 dém./h 1 800 dém./h Sans limite<br />
• Moteur à échauffement<br />
limité<br />
• Servomoteur<br />
à ren<strong>de</strong>ment<br />
mécanique élevé<br />
• Moteur spécial<br />
régulation<br />
• Contacteurs<br />
statiques<br />
• Servomoteur<br />
à ren<strong>de</strong>ment<br />
mécanique élevé<br />
• Moteur à<br />
asservissement<br />
<strong>de</strong> vitesse<br />
Caractéristiques<br />
générales <strong>de</strong>s moteurs<br />
à courant alternatif<br />
• A cage d’écureuil<br />
• Isolation Classe F<br />
• Montage sous cloche étanche<br />
• Protection thermique incorporée<br />
Qu’est-ce que les classes<br />
<strong>de</strong> régulation ?<br />
Un servomoteur électrique doit être adapté au rythme ou à la fréquence <strong>de</strong><br />
fonctionnement que lui impose la boucle <strong>de</strong> contrôle. Deux points sont essentiels<br />
pour augmenter la fiabilité du servomoteur :<br />
• la durée <strong>de</strong> vie du matériel est liée au nombre <strong>de</strong> manœuvres<br />
(moteur, mécanique, électronique…) ou aux changements <strong>de</strong> positions,<br />
• le moteur doit supporter les pics <strong>de</strong> fonctionnement (surchauffe).<br />
Le moteur n’est donc qu’un <strong>de</strong>s éléments, certes important, à prendre<br />
en compte lors du choix du servomoteur. C’est pour cela que <strong>Bernard</strong><br />
<strong>Controls</strong> propose une classification <strong>de</strong>s servomoteurs suivant quatre<br />
types <strong>de</strong> fonctionnement appelés CLASSES DE RÉGULATION. Celle-ci a<br />
très largement inspiré la classification utilisée par la norme européenne<br />
EN15714-2 sur les actionneurs électriques.<br />
Le choix d’un type <strong>de</strong> fonctionnement détermine la sélection d’un moteur. Suivant la norme CEI34 définissant<br />
les types <strong>de</strong> service moteur standard, <strong>Bernard</strong> <strong>Controls</strong> a choisi le service S4 car c’est le service le plus<br />
représentatif du fonctionnement d’un servomoteur.<br />
S1<br />
S2<br />
S3<br />
S4<br />
SERVICES MOTEUR SUIVANT LA NORME CEI34<br />
SERVICE PERMANENT<br />
Fonctionnement à charge constante d’une durée suffisante pour que l’équilibre thermique soit<br />
atteint.<br />
TEMPORAIRE<br />
Temps <strong>de</strong> fonctionnement court, refroidissement total nécessaire entre chaque démarrage.<br />
INTERMITTENT PÉRIODIQUE<br />
Le courant <strong>de</strong> démarrage n’affecte pas <strong>de</strong> façon significative l’échauffement.<br />
A faire suivre du temps <strong>de</strong> fonctionnement maxi.<br />
INTERMITTENT À DÉMARRAGE<br />
Suite <strong>de</strong> cycles comprenant :<br />
• pério<strong>de</strong> <strong>de</strong> démarrage D,<br />
• pério<strong>de</strong> <strong>de</strong> régime constant N,<br />
• pério<strong>de</strong> <strong>de</strong> repos R.<br />
A faire suivre du facteur <strong>de</strong> marche en %, ainsi que du nombre <strong>de</strong> démarrages par heure.<br />
Notre choix : S4 - Le seul service représentatif <strong>de</strong> l’application servomoteur est le service S4.