Diagnostic de défauts des systèmes à représentation multi-modèles ...
Diagnostic de défauts des systèmes à représentation multi-modèles ...
Diagnostic de défauts des systèmes à représentation multi-modèles ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
36 Chapitre 1 : Métho<strong>de</strong>s <strong>de</strong> diagnostic <strong>de</strong> <strong>défauts</strong> <strong>à</strong> base <strong>de</strong> <strong>modèles</strong> <strong>multi</strong>ples<br />
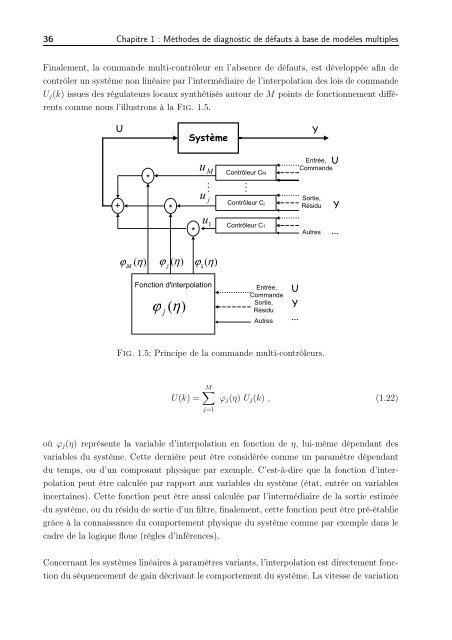
Finalement, la comman<strong>de</strong> <strong>multi</strong>-contrôleur en l’absence <strong>de</strong> <strong>défauts</strong>, est développée afin <strong>de</strong><br />
contrôler un système non linéaire par l’intermédiaire <strong>de</strong> l’interpolation <strong>de</strong>s lois <strong>de</strong> comman<strong>de</strong><br />
U j (k) issues <strong>de</strong>s régulateurs locaux synthétisés autour <strong>de</strong> M points <strong>de</strong> fonctionnement différents<br />
comme nous l’illustrons <strong>à</strong> la Fig. 1.5.<br />
U<br />
Système<br />
Y<br />
*<br />
j1<br />
u M<br />
Contrôleur CM<br />
Entrée,<br />
Comman<strong>de</strong><br />
U<br />
+<br />
*<br />
u j<br />
Contrôleur Cj<br />
Sortie,<br />
Résidu<br />
Y<br />
Contrôleur C1<br />
(η)<br />
ϕHη (<br />
Fonction d'interpolation<br />
ϕ j<br />
(η)<br />
(η)<br />
ϕI<br />
*<br />
u 1<br />
Autres<br />
...<br />
ϕG )<br />
Entrée,<br />
Comman<strong>de</strong><br />
Sortie,<br />
Résidu<br />
Autres<br />
U<br />
Y<br />
...<br />
Fig. 1.5: Principe <strong>de</strong> la comman<strong>de</strong> <strong>multi</strong>-contrôleurs.<br />
U(k) =<br />
M∑<br />
j=1<br />
ϕ j (η) U j (k) , (1.22)<br />
où ϕ j (η) représente la variable d’interpolation en fonction <strong>de</strong> η, lui-même dépendant <strong>de</strong>s<br />
variables du système. Cette <strong>de</strong>rnière peut être considérée comme un paramètre dépendant<br />
du temps, ou d’un composant physique par exemple. C’est-<strong>à</strong>-dire que la fonction d’interpolation<br />
peut être calculée par rapport aux variables du système (état, entrée ou variables<br />
incertaines). Cette fonction peut être aussi calculée par l’intermédiaire <strong>de</strong> la sortie estimée<br />
du système, ou du résidu <strong>de</strong> sortie d’un filtre, finalement, cette fonction peut être pré-établie<br />
grâce <strong>à</strong> la connaissance du comportement physique du système comme par exemple dans le<br />
cadre <strong>de</strong> la logique floue (règles d’inférences).<br />
Concernant les <strong>systèmes</strong> linéaires <strong>à</strong> paramètres variants, l’interpolation est directement fonction<br />
du séquencement <strong>de</strong> gain décrivant le comportement du système. La vitesse <strong>de</strong> variation