Diagnostic de défauts des systèmes à représentation multi-modèles ...
Diagnostic de défauts des systèmes à représentation multi-modèles ...
Diagnostic de défauts des systèmes à représentation multi-modèles ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ŷ<br />
ŷN<br />
38 Chapitre 1 : Métho<strong>de</strong>s <strong>de</strong> diagnostic <strong>de</strong> <strong>défauts</strong> <strong>à</strong> base <strong>de</strong> <strong>modèles</strong> <strong>multi</strong>ples<br />
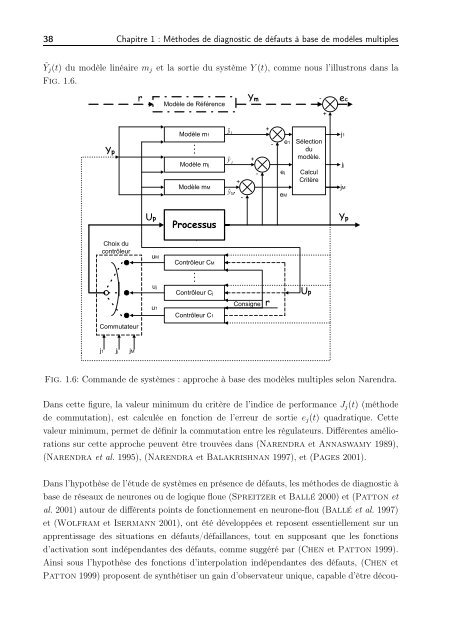
Ŷ j (t) du modèle linéaire m j et la sortie du système Y (t), comme nous l’illustrons dans la<br />
Fig. 1.6.<br />
r<br />
Ym<br />
- ec<br />
Modèle <strong>de</strong> Référence<br />
+<br />
Yp<br />
Modèle m1<br />
Modèle mj<br />
Modèle mM<br />
+<br />
-<br />
+<br />
-<br />
+<br />
-<br />
ej<br />
eM<br />
e1<br />
Sélection<br />
du<br />
modèle.<br />
Calcul<br />
Critère<br />
j1<br />
jj<br />
jM<br />
KL M J<br />
Up<br />
Processus<br />
Yp<br />
Choix du<br />
contrôleur<br />
uM<br />
j1<br />
Contrôleur CM<br />
uj<br />
u1<br />
Contrôleur Cj<br />
Consigne<br />
r<br />
Up<br />
Contrôleur C1<br />
Commutateur<br />
j1 jj jM<br />
Fig. 1.6: Comman<strong>de</strong> <strong>de</strong> <strong>systèmes</strong> : approche <strong>à</strong> base <strong>de</strong>s <strong>modèles</strong> <strong>multi</strong>ples selon Narendra.<br />
Dans cette figure, la valeur minimum du critère <strong>de</strong> l’indice <strong>de</strong> performance J j (t) (métho<strong>de</strong><br />
<strong>de</strong> commutation), est calculée en fonction <strong>de</strong> l’erreur <strong>de</strong> sortie e j (t) quadratique. Cette<br />
valeur minimum, permet <strong>de</strong> définir la commutation entre les régulateurs. Différentes améliorations<br />
sur cette approche peuvent être trouvées dans (Narendra et Annaswamy 1989),<br />
(Narendra et al. 1995), (Narendra et Balakrishnan 1997), et (Pages 2001).<br />
Dans l’hypothèse <strong>de</strong> l’étu<strong>de</strong> <strong>de</strong> <strong>systèmes</strong> en présence <strong>de</strong> <strong>défauts</strong>, les métho<strong>de</strong>s <strong>de</strong> diagnostic <strong>à</strong><br />
base <strong>de</strong> réseaux <strong>de</strong> neurones ou <strong>de</strong> logique floue (Spreitzer et Ballé 2000) et (Patton et<br />
al. 2001) autour <strong>de</strong> différents points <strong>de</strong> fonctionnement en neurone-flou (Ballé et al. 1997)<br />
et (Wolfram et Isermann 2001), ont été développées et reposent essentiellement sur un<br />
apprentissage <strong>de</strong>s situations en <strong>défauts</strong>/défaillances, tout en supposant que les fonctions<br />
d’activation sont indépendantes <strong>de</strong>s <strong>défauts</strong>, comme suggéré par (Chen et Patton 1999).<br />
Ainsi sous l’hypothèse <strong>de</strong>s fonctions d’interpolation indépendantes <strong>de</strong>s <strong>défauts</strong>, (Chen et<br />
Patton 1999) proposent <strong>de</strong> synthétiser un gain d’observateur unique, capable d’être décou-