

Poly du TPMDP2 : Partie à préparer
Poly du TPMDP2 : Partie à préparer
Poly du TPMDP2 : Partie à préparer

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
tel que ¥ : ¥ 0 ¦¨§ © <br />
α 1.<br />
&<br />
on<strong>du</strong>lations pour t < −T et t > 6 7 8 9¨:; < =¨> =<br />
<<br />
T)<br />
<br />
D<br />
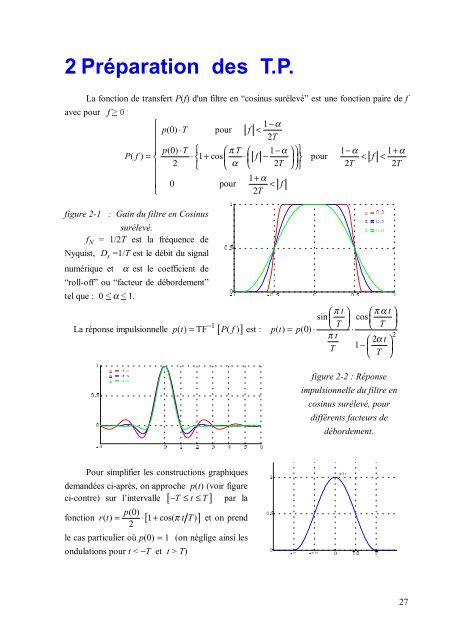
2 Préparation des T.P.<br />
La fonction de transfert P(f) d'un filtre en “cosinus surélevé” est une fonction paire de f<br />
avec pour f<br />
⎧<br />
1−<br />
¢¡¤£ α<br />
⎪<br />
p( 0) ⋅ T pour f <<br />
2T<br />
⎪<br />
⎪ p( 0)<br />
⋅T<br />
⎧ ⎛ π T ⎛ 1−α ⎞⎞⎫<br />
1−α 1+ α<br />
P( f ) = ⎨ ⋅ ⎨1+ cos⎜<br />
⋅ ⎜ f − ⎟ pour f<br />
α T<br />
⎟⎬<br />
< <<br />
⎪ 2 ⎩ ⎝ ⎝ 2 ⎠⎠⎭<br />
2T 2T<br />
⎪ 1+ α<br />
⎪ 0 pour < f<br />
⎩ 2T<br />
figure 2-1 : Gain <strong>du</strong> filtre en Cosinus<br />
surélevé.<br />
f N = 1/2T est la fréquence de<br />
Nyquist, D s =1/T est le débit <strong>du</strong> signal<br />
numérique et α est le coefficient de<br />
“roll-off” ou “facteur de débordement”<br />
<br />
<br />
<br />
<br />
−1<br />
La réponse impulsionnelle p( t) TF [ P( f )]<br />
= est :<br />
⎛ π t ⎞ ⎛ π α t ⎞<br />
sin ⎜ cos<br />
T<br />
⎟ ⎜<br />
T<br />
⎟<br />
p( t) = p( 0)<br />
⋅<br />
⎝ ⎠<br />
⋅<br />
⎝ ⎠<br />
π t<br />
⎛ 2α t ⎞<br />
2<br />
T<br />
1− ⎜ ⎟<br />
⎝ T ⎠<br />
'()<br />
+,-./ *<br />
+,-.0<br />
12345<br />
figure 2-2 : Réponse<br />
impulsionnelle <strong>du</strong> filtre en<br />
cosinus surélevé, pour<br />
différents facteurs de<br />
débordement.<br />
! " # $ %<br />
Pour simplifier les constructions graphiques<br />
demandées ci-après, on approche p(t) (voir figure<br />
−T ≤ t ≤ T par la<br />
ci-contre) sur l’intervalle [ ]<br />
p( 0)<br />
2<br />
fonction r( t) = ⋅[ 1+ cos( π t T)<br />
]<br />
et on prend<br />
le cas particulier où p(0) = 1 (on néglige ainsi les<br />
@BAC<br />
EGF HGI<br />
27
¢¡¤£<br />
¥§¦©¨¦©<br />
Considérons le schéma synoptique d' une mo<strong>du</strong>lation d' impulsion en amplitudes sur<br />
fréquence porteuse :<br />
Suite {b k }<br />
b k ∈ {0,1}<br />
débit 1/T<br />
Codage<br />
binaire<br />
à M-aire<br />
x(t)<br />
Formant<br />
Filtre<br />
passebas<br />
y(t) z(t)<br />
Réponse impulsionnelle = r(t)<br />
<br />
<br />
cos(2πf 0 t)<br />
Nous avons dans le cas binaire ( M = 2 ) :<br />
+∞<br />
( ) ∑ k<br />
avec la règle de codage<br />
Le signal x t = a ⋅δ<br />
( t − kT )<br />
k=−∞<br />
+∞<br />
∑<br />
Le signal y t = x t ∗ r t = a ⋅ r ( t − kT )<br />
( ) ( ) ( ) k<br />
k=−∞<br />
Le signal π ⎜ ( )<br />
⎧ak<br />
= −1 si bk<br />
= " 0"<br />
⎨<br />
⎩ak<br />
= +1 si bk<br />
= " 1"<br />
⎛ +∞<br />
⎞<br />
z( t) = y( t) ⋅ cos( 2 f0 t) = ak<br />
⋅ r t − kT ⋅ cos( 2π<br />
f0<br />
t)<br />
⎜ ∑ avec f<br />
⎟<br />
0 >> 1 / T .<br />
⎝ k=−∞<br />
⎠<br />
Question : Construire y(t) et z(t) pour la séquence binaire suivante :<br />
T<br />
Suite<br />
Binaire {b k }<br />
+1<br />
x(t)<br />
0 T<br />
3T 4T 5T<br />
7T<br />
11T 12T 13T<br />
−1<br />
2T<br />
6T<br />
8T 9T 10T<br />
28<br />
Remarque 1 : pour la construction de y(t) et z(t), on négligera les phénomènes<br />
− T < t < 0 et<br />
transitoires de début et fin de séquence, c' est-à-dire les courbes situées entre [ ]<br />
[ 13 T < t < 14 T ] en se référant à la gra<strong>du</strong>ation de l' axe des temps de x(t) (prendre T=1cm et<br />
1cm pour la valeur unité en ordonnée).<br />
Remarque 2 : pour la construction de z(t), comme f >> 1 / T , on se contentera de faire<br />
figurer l’enveloppe de z(t) en précisant l' état de phase de la porteuse à l' intérieur de ces<br />
extremums (voir l' exemple ci-dessous).<br />
0
Signal mo<strong>du</strong>lant m(t)<br />
Signal mo<strong>du</strong>lé m(t)·cos(2π f 0 t) .<br />
En phase avec la porteuse<br />
t<br />
(0)<br />
π<br />
( ) (0)<br />
π<br />
( )<br />
(0)<br />
t<br />
En opposition de phase<br />
¢¡£<br />
¤¦¥¨§©§¨£¨¥¢© <br />
{ d k }<br />
G(f)<br />
Filtre<br />
de forme<br />
A B C H r (f) D<br />
Porteuse émission<br />
A·cos(ω 0 t) BABG<br />
centré de<br />
DSP N 0 /2<br />
Filtre de<br />
réception<br />
Questions :<br />
D’après le schéma ci-dessus, calculer l’énergie moyenne émise par symbole et par bit<br />
pour une MIA-M où { d } est une suite i.i.d. équiprobable et d ∈ { ±1 , ± 3 ,…, ± ( M −1)}<br />
k<br />
Quel est le rapport signal à bruit Eb<br />
/ N 0 pour une MDP-2 avec un formant g( t)<br />
rectangulaire et normé <br />
Quelle est la puissance de la porteuse seule en sortie <strong>du</strong> filtre H r <br />
Quelle est la puissance <strong>du</strong> bruit seul en sortie <strong>du</strong> filtre H r <br />
Pour la MDP-2 avec un formant g( t ) rectangulaire, exprimer le rapport signal à bruit<br />
E / N 0 en fonction de la bande équivalente de bruit <strong>du</strong> filtre passe-bande :<br />
b<br />
k<br />
B<br />
éq<br />
∆<br />
=<br />
⌠ +∞ 2<br />
⎮ ( )<br />
⌡−∞<br />
2<br />
2 H ( f0<br />
)<br />
H f df<br />
.<br />
29
¥§¦©¨ ¨ §¨ <br />
¢¡¤£<br />
!"$#%&%#'%&(<br />
C<br />
Pour une suite numérique, l’estimateur ergodique de la probabilité d’erreur est le taux<br />
d’erreur défini par :<br />
Questions :<br />
nombre d' erreurs observées<br />
nombre de symboles reçus<br />
Déterminer avec quel degré de confiance on peut obtenir une précision de 5% sur l’écart<br />
relatif <strong>du</strong> taux d’erreur en observant environ 1000 erreurs.<br />
Déterminer le nombre d’erreurs à observer pour une précision de 20% sur l’écart relatif<br />
<strong>du</strong> taux d’erreur avec une probabilité de ne pas se tromper de 95%.<br />
)¢*+<br />
012§345607 ,86$9:9;-56=¢33=<br />
Soit le schéma synoptique suivant (en équivalent Bande de Base) :<br />
,.-/<br />
d k = b k ⊕ d k−1<br />
{ b k }<br />
Binaire<br />
à<br />
Binaire par<br />
transition<br />
Suite binaire<br />
Suite binaire<br />
par transition<br />
Codage<br />
Binaire<br />
à M-aire<br />
{ d k }<br />
d k ∈ {0,1}<br />
x(t)<br />
Formant<br />
Filtre<br />
passebas<br />
y(t)<br />
Réponse impulsionnelle = r(t)<br />
A B B BB B B B B @<br />
T<br />
z(t)<br />
×(−1)<br />
z 1 (t)<br />
+∞<br />
( ) ∑ k<br />
avec la règle de codage<br />
Le signal x t = a ⋅δ<br />
( t − kT )<br />
k=−∞<br />
+∞<br />
∑<br />
Le signal y t = x t ∗ r t = a ⋅ r ( t − kT )<br />
( ) ( ) ( ) k<br />
k=−∞<br />
Le signal z( t) = y( t) ⋅ y( t − T)<br />
et z1 ( t) = − z( t)<br />
.<br />
⎧ak<br />
= −1 si dk<br />
= " 0"<br />
⎨<br />
⎩ak<br />
= +1 si dk<br />
= " 1"<br />
30
Question : Construire y(t), z(t) et z 1 (t) correspondant à la séquence ci-dessous :<br />
Suite<br />
Binaire {b k }<br />
T<br />
Suite<br />
Binaire {d k }<br />
+1<br />
x(t) 0 T<br />
6T<br />
7T<br />
9T<br />
−1<br />
2T 3T 4T 5T<br />
8T<br />
10T 11T 12T 13T<br />
NB : Pour la construction de y(t), z 1 (t) et z(t), on reprendra les conditions posées à la<br />
remarque (1) de la 1 ère partie.<br />
31













