1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...
1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...
1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
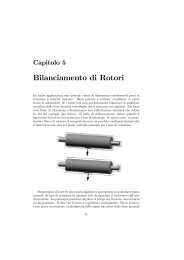
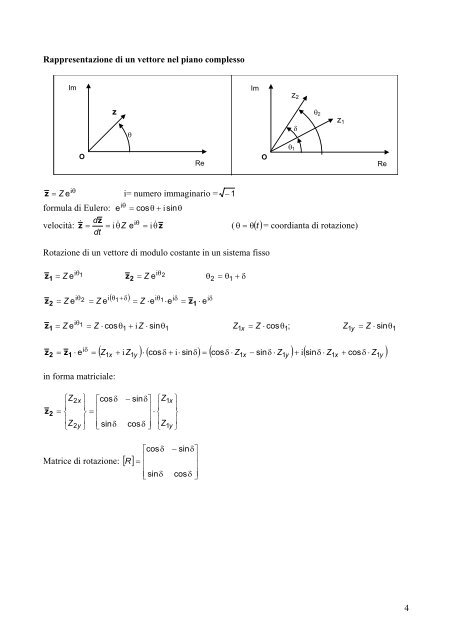
Rappresentazione di un vettore nel piano complesso<br />
Im<br />
iθ<br />
O<br />
z<br />
θ<br />
Re<br />
z = Z e<br />
i= numero immaginario = − 1<br />
formula di Eulero: ei θ = cosθ<br />
+ isinθ<br />
z<br />
velocità: z& d<br />
= = iθ&<br />
Z eiθ<br />
= iθ&<br />
z<br />
dt<br />
( θ = θ(<br />
t ) = coordianta di rotazione)<br />
Rotazione di un vettore di modulo costante in un sistema fisso<br />
e 1 θ i<br />
e θ i<br />
z 1 = Z<br />
z = Z 2<br />
2<br />
θ2 = θ1<br />
+ δ<br />
iθ<br />
i(<br />
θ + δ)<br />
iθ<br />
z = Z e 2 = Z e 1 = Z ⋅e<br />
1⋅<br />
eiδ<br />
= z ⋅ eiδ<br />
2<br />
1<br />
e cos 1 sin 1<br />
1 iθ<br />
z 1 = Z = Z ⋅ θ + iZ<br />
⋅ θ<br />
Z1x = Z ⋅ cosθ1; Z1y<br />
= Z ⋅ sinθ1<br />
( + iZ<br />
) ⋅ ( cosδ<br />
+ i⋅<br />
sinδ)<br />
= ( cosδ<br />
⋅ Z − sinδ<br />
⋅ Z ) + ( sinδ<br />
⋅ Z + cosδ<br />
Z )<br />
z = ⋅ eiδ 2 z1<br />
= Z1x 1y<br />
1x<br />
1y<br />
i 1x<br />
⋅ 1y<br />
in forma matriciale:<br />
z 2<br />
⎧Z2x<br />
⎫ ⎡cosδ<br />
⎪ ⎪<br />
= =<br />
⎢<br />
⎨ ⎬ ⎢<br />
⎪ ⎪<br />
⎩<br />
Z2y<br />
⎭<br />
⎢⎣<br />
sinδ<br />
Matrice di rotazione: [ R<br />
]<br />
− sinδ⎤<br />
⎧Z1x<br />
⎫<br />
⎥ ⎪ ⎪<br />
⎥<br />
⋅ ⎨ ⎬<br />
cosδ<br />
⎥ ⎪ ⎪<br />
⎦ ⎩<br />
Z1y<br />
⎭<br />
⎡cosδ<br />
=<br />
⎢<br />
⎢<br />
⎢⎣<br />
sinδ<br />
− sinδ⎤<br />
⎥<br />
⎥<br />
cosδ<br />
⎥⎦<br />
Im<br />
O<br />
z2<br />
θ1<br />
δ<br />
θ2<br />
z1<br />
Re<br />
4