1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...
1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...
1 FORMULARIO DI CINEMATICA DEL PUNTO 1. CALCOLO ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
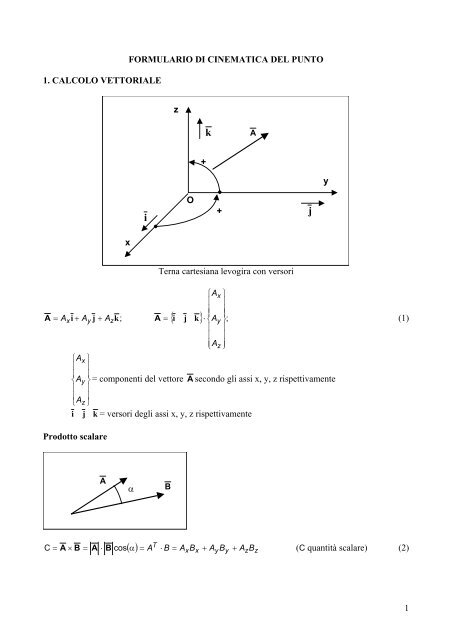
<strong>1.</strong> <strong>CALCOLO</strong> VETTORIALE<br />
x<br />
<strong>FORMULARIO</strong> <strong>DI</strong> <strong>CINEMATICA</strong> <strong>DEL</strong> <strong>PUNTO</strong><br />
i<br />
z<br />
O<br />
+<br />
k<br />
+<br />
Terna cartesiana levogira con versori<br />
⎧Ax<br />
⎫<br />
⎪ ⎪<br />
⎪<br />
⎪<br />
A = Ax i + Ay<br />
j + Azk<br />
; A = { i j k}<br />
⋅ ⎨Ay<br />
⎬;<br />
(1)<br />
⎪ ⎪<br />
⎪ ⎪<br />
⎪⎩<br />
Az<br />
⎪⎭<br />
⎧Ax<br />
⎫<br />
⎪ ⎪<br />
⎪ ⎪<br />
⎨Ay<br />
⎬=<br />
componenti del vettore A secondo gli assi x, y, z rispettivamente<br />
⎪ ⎪<br />
⎪ ⎪<br />
⎩Az<br />
⎭<br />
i j k = versori degli assi x, y, z rispettivamente<br />
Prodotto scalare<br />
A<br />
α<br />
B<br />
( α)<br />
= A T ⋅ B = AxBx<br />
+ Ay<br />
By<br />
+ AzBz<br />
C = A × B = A ⋅ B cos<br />
(C quantità scalare) (2)<br />
A<br />
j<br />
y<br />
1
con: A T = { A A A }<br />
Prodotto vettoriale<br />
C<br />
α<br />
x<br />
y<br />
A<br />
z<br />
⎧B<br />
⎪<br />
⎪<br />
B = ⎨B<br />
⎪<br />
⎪<br />
⎪⎩<br />
B<br />
B<br />
x<br />
y<br />
z<br />
⎡ i j k ⎤<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
C = A ∧ B = det ⎢Ax<br />
Ay<br />
A ⎥<br />
z = i(<br />
Ay<br />
Bz<br />
− AzBy<br />
) − j(<br />
AxBz<br />
− AzBx<br />
) + k(<br />
AxBy<br />
− Ay<br />
Bx<br />
) (3)<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
⎢Bx<br />
By<br />
B ⎥<br />
⎣<br />
z ⎦<br />
⎧ Ay<br />
Bz<br />
− AzBy<br />
⎫<br />
⎪<br />
⎪<br />
⎪<br />
⎪<br />
⎨−<br />
AxBz<br />
+ AzBx<br />
⎬ = componenti lungo gli assi x, y, z del vettore prodotto vettoriale<br />
⎪<br />
⎪<br />
⎪<br />
⎪<br />
⎩<br />
AxBy<br />
− AyB<br />
⎭<br />
C = A ⋅ B sin<br />
( α)<br />
Prodotto misto: ( A ∧ B)<br />
× C = ( A × B)<br />
∧ C<br />
Doppio prodotto vettore: A ∧ ( B ∧ C)<br />
= ( A × C)<br />
⋅ B - ( A × B)<br />
⋅ C<br />
Vettore velocità angolare: = { i j k}<br />
⋅ ω = ω ⋅ i ω ⋅ j + ω ⋅ k<br />
⎫<br />
⎪<br />
⎪<br />
⎬<br />
⎪<br />
⎪<br />
⎪⎭<br />
⎧ωx<br />
⎫<br />
⎪ ⎪<br />
⎪<br />
⎪<br />
ω ⎨ y ⎬ x + y z<br />
(4)<br />
⎪ ⎪<br />
⎪ ⎪<br />
⎪⎩<br />
ωz<br />
⎪⎭<br />
2
Formule di Poisson (Velocità dei versori)<br />
⎡ i<br />
⎢<br />
⎢<br />
di<br />
= ω ∧ i = det⎢ωx<br />
dt<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
1<br />
j<br />
ωy<br />
0<br />
k ⎤<br />
⎥<br />
⎥<br />
ω ⎥<br />
z = ωz<br />
⋅ j − ωy<br />
⋅ k<br />
⎥<br />
⎥<br />
0<br />
⎥<br />
⎦<br />
(5)<br />
⎡ i<br />
⎢<br />
⎢<br />
dj<br />
= ω ∧ j = det⎢ωx<br />
dt<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
0<br />
j<br />
ωy<br />
1<br />
k ⎤<br />
⎥<br />
⎥<br />
ω ⎥<br />
z = −ωz<br />
⋅ i + ωx<br />
⋅ k<br />
⎥<br />
⎥<br />
0<br />
⎥<br />
⎦<br />
(6)<br />
⎡ i<br />
⎢<br />
⎢<br />
dk<br />
= ω ∧k<br />
= det⎢ωx<br />
dt<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
0<br />
j<br />
ωy<br />
0<br />
k ⎤<br />
⎥<br />
⎥<br />
ω ⎥<br />
z = ωy<br />
⋅ i − ωx<br />
⋅ j<br />
⎥<br />
⎥<br />
1<br />
⎥<br />
⎦<br />
(7)<br />
Derivata di un vettore rispetto al tempo<br />
Vettore A come descritto in eq. (1); vettore ω con descritto in eq. (4). Uso delle formule di<br />
Poisson.<br />
1° caso – terna fissa, versori fissi<br />
dA dA dAy<br />
dA<br />
= i x + j + k z<br />
dt dt dt dt<br />
2° caso – terna mobile, versori mobili<br />
dA<br />
dA dA<br />
x y dAz<br />
di<br />
dj<br />
= i + j + k + Ax<br />
+ Ay<br />
+ A<br />
dt dt dt dt dt dt<br />
dA<br />
&<br />
= A + ω ∧ A<br />
dt<br />
z<br />
dk<br />
dt<br />
⎧ &<br />
dA dAy<br />
dA<br />
⎪A<br />
= i x + j + k z<br />
⎪ dt dt dt<br />
essendo: ⎨<br />
⎪<br />
di<br />
dj<br />
⎪<br />
ω ∧ A = Ax<br />
+ Ay<br />
+ A<br />
⎩<br />
dt dt<br />
z<br />
dk<br />
dt<br />
3
Rappresentazione di un vettore nel piano complesso<br />
Im<br />
iθ<br />
O<br />
z<br />
θ<br />
Re<br />
z = Z e<br />
i= numero immaginario = − 1<br />
formula di Eulero: ei θ = cosθ<br />
+ isinθ<br />
z<br />
velocità: z& d<br />
= = iθ&<br />
Z eiθ<br />
= iθ&<br />
z<br />
dt<br />
( θ = θ(<br />
t ) = coordianta di rotazione)<br />
Rotazione di un vettore di modulo costante in un sistema fisso<br />
e 1 θ i<br />
e θ i<br />
z 1 = Z<br />
z = Z 2<br />
2<br />
θ2 = θ1<br />
+ δ<br />
iθ<br />
i(<br />
θ + δ)<br />
iθ<br />
z = Z e 2 = Z e 1 = Z ⋅e<br />
1⋅<br />
eiδ<br />
= z ⋅ eiδ<br />
2<br />
1<br />
e cos 1 sin 1<br />
1 iθ<br />
z 1 = Z = Z ⋅ θ + iZ<br />
⋅ θ<br />
Z1x = Z ⋅ cosθ1; Z1y<br />
= Z ⋅ sinθ1<br />
( + iZ<br />
) ⋅ ( cosδ<br />
+ i⋅<br />
sinδ)<br />
= ( cosδ<br />
⋅ Z − sinδ<br />
⋅ Z ) + ( sinδ<br />
⋅ Z + cosδ<br />
Z )<br />
z = ⋅ eiδ 2 z1<br />
= Z1x 1y<br />
1x<br />
1y<br />
i 1x<br />
⋅ 1y<br />
in forma matriciale:<br />
z 2<br />
⎧Z2x<br />
⎫ ⎡cosδ<br />
⎪ ⎪<br />
= =<br />
⎢<br />
⎨ ⎬ ⎢<br />
⎪ ⎪<br />
⎩<br />
Z2y<br />
⎭<br />
⎢⎣<br />
sinδ<br />
Matrice di rotazione: [ R<br />
]<br />
− sinδ⎤<br />
⎧Z1x<br />
⎫<br />
⎥ ⎪ ⎪<br />
⎥<br />
⋅ ⎨ ⎬<br />
cosδ<br />
⎥ ⎪ ⎪<br />
⎦ ⎩<br />
Z1y<br />
⎭<br />
⎡cosδ<br />
=<br />
⎢<br />
⎢<br />
⎢⎣<br />
sinδ<br />
− sinδ⎤<br />
⎥<br />
⎥<br />
cosδ<br />
⎥⎦<br />
Im<br />
O<br />
z2<br />
θ1<br />
δ<br />
θ2<br />
z1<br />
Re<br />
4
2. <strong>CINEMATICA</strong> <strong>DEL</strong> <strong>PUNTO</strong><br />
2.<strong>1.</strong> MOTO NELLO SPAZIO<br />
Coordinate parametriche di moto di un punto nello spazio:<br />
t = tempo, variabile indipendente<br />
⎧x<br />
= x<br />
⎪<br />
⎨y<br />
= y<br />
⎪<br />
⎪⎩<br />
z = z<br />
Velocità del punto (sottintesa la dipendenza dalla variabile indipendente tempo)<br />
( t )<br />
⎧ dx<br />
⎪x&<br />
=<br />
dt<br />
⎪<br />
⎪ dy<br />
⎨y&<br />
=<br />
⎪ dt<br />
⎪ dz<br />
⎪z&<br />
=<br />
⎩ dt<br />
() t<br />
() t<br />
in forma vettoriale v = { i j k}<br />
⎧v<br />
⎪<br />
⎪<br />
⋅ ⎨v<br />
⎪<br />
⎪<br />
⎩v<br />
x<br />
y<br />
z<br />
⎫<br />
⎪<br />
⎪<br />
⎬<br />
⎪<br />
⎪<br />
⎭<br />
( t )<br />
() t<br />
() t<br />
(simbologia alternativa: = x&<br />
; v = y&<br />
; v = z&<br />
)<br />
v x y z<br />
2 2 2<br />
v = v x + v x + v z<br />
Modulo (=lunghezza =norma) del vettore velocità<br />
Accelerazione del punto (sottintesa la dipendenza dalla variabile indipendente tempo)<br />
⎧ d 2x<br />
⎪x&<br />
& =<br />
⎪ dt 2<br />
⎪ d 2y<br />
⎨y&<br />
& =<br />
2<br />
⎪ dt<br />
⎪ d 2z<br />
⎪z&<br />
& =<br />
⎪ 2<br />
⎩ dt<br />
( t )<br />
() t<br />
() t<br />
in forma vettoriale a = { i j k}<br />
(simbologia alternativa: = x&<br />
& ; a = y&<br />
& ; a = z&<br />
& )<br />
⎧ax<br />
⎫<br />
⎪ ⎪<br />
⎪<br />
⎪<br />
⋅ ⎨ay<br />
⎬<br />
⎪ ⎪<br />
⎪ ⎪<br />
⎪⎩<br />
az<br />
⎪⎭<br />
ax y z<br />
2 2 2<br />
a = a x + ax<br />
+ az<br />
Modulo (=lunghezza =norma) del vettore accelerazione)<br />
a = at<br />
+ an<br />
a t = vettore accelerazione tangenziale alla traiettoria<br />
a = vettore accelerazione normale alla traiettoria<br />
n<br />
(8)<br />
5
Parametri della TRAIETTORIA nello spazio<br />
⎧v<br />
x ⎫<br />
⎪ ⎪<br />
⎪<br />
v<br />
⎪<br />
⎪v<br />
y ⎪<br />
Versore tangente: t()<br />
t = { i j k}<br />
⋅ ⎨ ⎬<br />
(9)<br />
⎪ v ⎪<br />
⎪v<br />
z ⎪<br />
⎪ ⎪<br />
⎩ v ⎭<br />
v ∧ a<br />
Versore binormale: b()<br />
t =<br />
(10)<br />
v ∧ a<br />
Versore normale principale: n() t = b()<br />
t ∧ t(<br />
t )<br />
(11)<br />
Curvatura: () t =<br />
3<br />
k<br />
v ∧ a<br />
v<br />
(12)<br />
3<br />
1 v<br />
Raggio di curvatura: ρ()<br />
t = =<br />
(13)<br />
k()<br />
t v ∧ a<br />
2.2. MOTO NEL PIANO<br />
Stesse espressioni del moto nello spazio con l’ovvia esclusione dei parametri cinematici relativi<br />
all’asse z. Eccezione moto rotatorio nel piano:<br />
⎧ 0 ⎫<br />
⎪ ⎪<br />
ωx = ωy<br />
= 0; ωz<br />
≠ 0;<br />
ω = { i j k}<br />
⋅ ⎨ 0 ⎬ = ωz<br />
⋅ k<br />
⎪ ⎪<br />
⎩ωz<br />
⎭<br />
Parametri della TRAIETTORIA nel PIANO<br />
Versore tangente: t()<br />
t = { j}<br />
Versore normale: n()<br />
t = { j}<br />
⎧v<br />
x ⎫<br />
⎪ ⎪<br />
⎪ v ⎪<br />
i ⋅ ⎨ ⎬<br />
(14)<br />
v<br />
⎪ y ⎪<br />
⎪<br />
⎩ v ⎪<br />
⎭<br />
⎧ v y ⎫<br />
⎪−<br />
⎪<br />
⎪ v ⎪<br />
i ⋅ ⎨ ⎬<br />
(15)<br />
⎪<br />
v x ⎪<br />
⎪<br />
⎩ v ⎪<br />
⎭<br />
v x ⋅ ay<br />
Curvatura: k()<br />
t =<br />
− v y ⋅ ax<br />
(16)<br />
v 2 + v 2<br />
( ) 3<br />
x<br />
y<br />
6
1<br />
Raggio di curvatura: ρ()<br />
t =<br />
k t<br />
()<br />
=<br />
v<br />
Componenti del vettore accelerazione<br />
t = at<br />
× t<br />
t<br />
x<br />
( v 2 + v 2 )<br />
⋅ a<br />
a = a = componente della accelerazione tangente alla traiettoria<br />
a = a = componente della accelerazione normale alla traiettoria<br />
an<br />
n = an<br />
× n<br />
2<br />
n<br />
x<br />
y<br />
− v<br />
y<br />
y<br />
3<br />
⋅ a<br />
x<br />
v<br />
= relazione tra accelerazione normale, velocità e raggio di curvatura della traiettoria<br />
ρ<br />
(17)<br />
7
3. <strong>CINEMATICA</strong> <strong>DEL</strong> CORPO RIGIDO<br />
posizione<br />
velocità<br />
FORMULAZIONE VETTORIALE FORMULAZIONE MATRICIALE NEL PIANO<br />
w<br />
f<br />
= ρ = + [ R]<br />
⋅<br />
P + w<br />
&<br />
P = ρ&<br />
+ w&<br />
= ρ&<br />
+ ω ∧ w<br />
f yP<br />
O f<br />
f<br />
⎧x<br />
⎪<br />
⎨<br />
⎪<br />
⎩y<br />
P<br />
P<br />
m yP<br />
⎫<br />
⎪<br />
⎬<br />
⎪<br />
⎭<br />
O m<br />
f<br />
⎧x<br />
⎪<br />
⎨<br />
⎪<br />
⎩y<br />
Om<br />
Om<br />
⎫<br />
⎪<br />
⎬<br />
⎪<br />
⎭<br />
f xP<br />
m<br />
f f<br />
⎧x&<br />
⎫ ⎧ ⎫<br />
⎪<br />
P x&<br />
Om<br />
⎪ ⎪ ⎪<br />
⎨ ⎬=<br />
⎨ ⎬ + θ&<br />
f<br />
⋅m<br />
⎪<br />
⎩y&<br />
P ⎪<br />
⎭<br />
⎪<br />
⎩y&<br />
Om ⎪<br />
⎭<br />
m xP<br />
[ R]<br />
⋅<br />
m<br />
⎧x<br />
⎪<br />
⎨<br />
⎪<br />
⎩y<br />
P<br />
P<br />
⎫<br />
⎪<br />
⎬<br />
⎪<br />
⎭<br />
m<br />
⎧− y ⎫<br />
⎪<br />
P<br />
⎪<br />
⎨ ⎬<br />
⎪<br />
⎩ xP<br />
⎪<br />
⎭<br />
segue<br />
1
2<br />
FORMULAZIONE VETTORIALE FORMULAZIONE MATRICIALE NEL PIANO<br />
accelerazione<br />
( )<br />
( ) normale<br />
accel.<br />
e<br />
tangenzial<br />
accel.<br />
=<br />
∧<br />
∧<br />
=<br />
∧<br />
∧<br />
∧<br />
+<br />
∧<br />
+<br />
=<br />
w<br />
w<br />
w<br />
w<br />
P<br />
ω<br />
ω<br />
ω<br />
ω<br />
ω<br />
ω<br />
ρ<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
[ ] [ ]<br />
[ ]<br />
[ ] normale<br />
accel.<br />
e<br />
tangenzial<br />
accel.<br />
2<br />
2<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
⋅<br />
θ<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
⋅<br />
θ<br />
−<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
Om<br />
Om<br />
f<br />
P<br />
P<br />
f<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
y<br />
x<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&
4. <strong>CINEMATICA</strong> <strong>DEL</strong> MOTO RELATIVO <strong>DEL</strong> CORPO RIGIDO<br />
posizione<br />
FORMULAZIONE VETTORIALE FORMULAZIONE MATRICIALE NEL PIANO<br />
w1<br />
w2<br />
⎧xP<br />
⎫ ⎧xOm<br />
⎫<br />
⎪ ⎪ ⎪ ⎪ f<br />
= ⎨ ⎬=<br />
⎨ ⎬+<br />
m [ R]<br />
⋅<br />
⎪<br />
⎩y<br />
P ⎪<br />
⎭<br />
⎪<br />
⎩yOm<br />
⎪<br />
⎭<br />
1 2 w w P +<br />
w1<br />
f<br />
f<br />
w2<br />
m<br />
⎧x<br />
⎪<br />
⎨<br />
⎪<br />
⎩y<br />
P<br />
P<br />
⎫<br />
⎪<br />
⎬<br />
⎪<br />
⎭<br />
segue<br />
3
4<br />
FORMULAZIONE VETTORIALE FORMULAZIONE MATRICIALE NEL PIANO<br />
velocità<br />
relativa<br />
velocità<br />
nto<br />
trasciname<br />
velocità<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
1<br />
=<br />
=<br />
+<br />
+<br />
=<br />
∧<br />
+<br />
+<br />
+<br />
+<br />
∧<br />
+<br />
=<br />
+<br />
=<br />
rel<br />
m<br />
z<br />
m<br />
y<br />
m<br />
x<br />
m<br />
z<br />
m<br />
y<br />
m<br />
x<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
P<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
k<br />
j<br />
i<br />
k<br />
j<br />
i<br />
α<br />
α<br />
[ ] [ ]<br />
[ ]<br />
[ ] relativa<br />
velocità<br />
nto<br />
trasciname<br />
velocità<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
Om<br />
Om<br />
f<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
Om<br />
Om<br />
f<br />
P<br />
P<br />
f<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
y<br />
x<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
segue
5<br />
FORMULAZIONE VETTORIALE FORMULAZIONE MATRICIALE NEL PIANO<br />
accelerazione<br />
( )<br />
( )<br />
Coriolis<br />
accel.<br />
2<br />
relativa<br />
accel.<br />
nto<br />
trasciname<br />
accel.<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
2<br />
2<br />
2<br />
1<br />
=<br />
∧<br />
=<br />
=<br />
∧<br />
∧<br />
+<br />
∧<br />
+<br />
∧<br />
+<br />
+<br />
∧<br />
∧<br />
+<br />
∧<br />
+<br />
=<br />
rel<br />
rel<br />
rel<br />
rel<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
w<br />
P<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
α<br />
α<br />
α<br />
α<br />
α<br />
α<br />
α<br />
α<br />
[ ] [ ]<br />
[ ] [ ]<br />
[ ] [ ]<br />
[ ]<br />
[ ] Coriolis<br />
accel.<br />
2<br />
relativa<br />
accel.<br />
nto<br />
trasciname<br />
accel.<br />
2<br />
2<br />
2<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
⋅<br />
θ<br />
−<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
+<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
⋅<br />
⋅<br />
θ<br />
−<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧−<br />
⋅<br />
⋅<br />
θ<br />
+<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
=<br />
⎪<br />
⎭<br />
⎪<br />
⎬<br />
⎫<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
Om<br />
Om<br />
f<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
P<br />
P<br />
m<br />
f<br />
m<br />
Om<br />
Om<br />
f<br />
P<br />
P<br />
f<br />
x<br />
y<br />
R<br />
y<br />
x<br />
R<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
x<br />
y<br />
R<br />
y<br />
x<br />
R<br />
y<br />
x<br />
R<br />
x<br />
y<br />
R<br />
y<br />
x<br />
y<br />
x<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&<br />
&