

Slides - Automatica - Università degli Studi di Padova
Slides - Automatica - Università degli Studi di Padova
Slides - Automatica - Università degli Studi di Padova

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
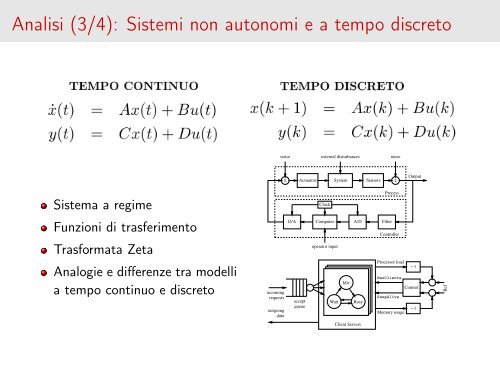
Analisi (3/4): Sistemi non autonomi e a tempo <strong>di</strong>screto<br />
Sistema a regime<br />
Funzioni <strong>di</strong> trasferimento<br />
Trasformata Zeta<br />
Analogie e <strong>di</strong>fferenze tra modelli<br />
a tempo continuo e <strong>di</strong>screto<br />
4 CHAPTER 1. INTRODUCTION<br />
noise<br />
<br />
Actuators<br />
external <strong>di</strong>sturbances<br />
Clock<br />
System Sensors<br />
D/A Computer A/D<br />
Controller<br />
operator input<br />
76 CHAPTER 3. EXAMPLES<br />
Figure 1.3: Components of a computer-controlled system. The upper dashed box represents<br />
the process dynamics, which include the sensors and actuatorsProcessor in ad<strong>di</strong>tion load to the dynamical<br />
system being controlled. Noise and external <strong>di</strong>sturbances can perturb the dynamics −1 of the<br />
process. The controller is shown in the lower dashed box. It consists of a filter and analog-to<strong>di</strong>gital<br />
(A/D) and <strong>di</strong>gital-to-analog (D/A) converters, as well as MaxClients a computer that implements<br />
the control algorithm. A system clock controls Idlethe<br />
operation of the controller, synchronizing<br />
the A/D, D/A and computing processes. The operator input is also fed to the computer Control as an<br />
external incoming input.<br />
requests<br />
KeepAlive<br />
accept<br />
Wait Busy<br />
queue<br />
−1<br />
outgoing<br />
Memory usage<br />
A modern data controller senses the operation of a system, compares it against the<br />
desired behavior, computes corrective actions based on a model of the system’s<br />
Client Servers<br />
response to external inputs and actuates the system to effect the desired change.<br />
This basic Figure feedback 3.11: Feedback loop ofcontrol sensing, of acomputation web server. Connection and actuation requests arrive is theoncentral an inputcon queue,<br />
cept in control. where theyThe are sent keytoissues a serverinprocess. designing A finitecontrol state machine logickeeps are track ensuring of the that state of the the<br />
dynamics in<strong>di</strong>vidual of the closed server processes loop system and responds are stable to requests. (bounded A control <strong>di</strong>sturbances algorithmgive canbounded mo<strong>di</strong>fy the<br />
errors) and server’s thatoperation they have by controlling ad<strong>di</strong>tional parameters desired behavior that affect its (good behavior, <strong>di</strong>sturbance such as theattenua maximum<br />
number of requests that can be serviced at a single time (MaxClients) or the amount of<br />
tion, fast responsiveness to changes in operating point, etc). These properties are<br />
time that a connection can remain idle before it is dropped (KeepAlive).<br />
established using a variety of modeling and analysis techniques that capture the<br />
essential dynamics of the system and permit the exploration of possible behaviors<br />
Filter<br />
noise<br />
<br />
Process<br />
Output<br />
Ref














