silabus singkat matakuliah program magister instrumentasi - ITB
silabus singkat matakuliah program magister instrumentasi - ITB
silabus singkat matakuliah program magister instrumentasi - ITB

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
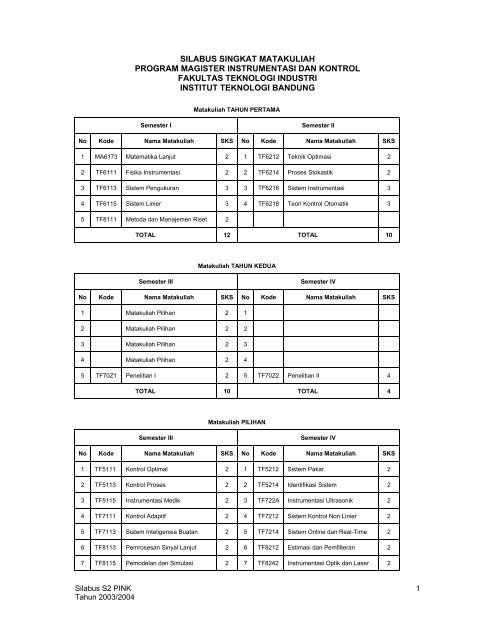
SILABUS SINGKAT MATAKULIAH<br />
PROGRAM MAGISTER INSTRUMENTASI DAN KONTROL<br />
FAKULTAS TEKNOLOGI INDUSTRI<br />
INSTITUT TEKNOLOGI BANDUNG<br />
Matakuliah TAHUN PERTAMA<br />
Semester I<br />
Semester II<br />
No Kode Nama Matakuliah SKS No Kode Nama Matakuliah SKS<br />
1 MA6173 Matematika Lanjut 2 1 TF6212 Teknik Optimasi 2<br />
2 TF6111 Fisika Instrumentasi 2 2 TF6214 Proses Stokastik 2<br />
3 TF6113 Sistem Pengukuran 3 3 TF6216 Sistem Instrumentasi 3<br />
4 TF6115 Sistem Linier 3 4 TF6218 Teori Kontrol Otomatik 3<br />
5 TF8111 Metoda dan Manajemen Riset 2<br />
TOTAL 12 TOTAL 10<br />
Matakuliah TAHUN KEDUA<br />
Semester III<br />
Semester IV<br />
No Kode Nama Matakuliah SKS No Kode Nama Matakuliah SKS<br />
1 Matakuliah Pilihan 2 1<br />
2 Matakuliah Pilihan 2 2<br />
3 Matakuliah Pilihan 2 3<br />
4 Matakuliah Pilihan 2 4<br />
5 TF70Z1 Penelitian I 2 5 TF70Z2 Penelitian II 4<br />
TOTAL 10 TOTAL 4<br />
Matakuliah PILIHAN<br />
Semester III<br />
Semester IV<br />
No Kode Nama Matakuliah SKS No Kode Nama Matakuliah SKS<br />
1 TF5111 Kontrol Optimal 2 1 TF5212 Sistem Pakar 2<br />
2 TF5113 Kontrol Proses 2 2 TF5214 Identifikasi Sistem 2<br />
3 TF5115 Instrumentasi Medik 2 3 TF722A Instrumentasi Ultrasonik 2<br />
4 TF7111 Kontrol Adaptif 2 4 TF7212 Sistem Kontrol Non Linier 2<br />
5 TF7113 Sistem Inteligensia Buatan 2 5 TF7214 Sistem Online dan Real-Time 2<br />
6 TF8113 Pemrosesan Sinyal Lanjut 2 6 TF8212 Estimasi dan Pemfilteran 2<br />
7 TF8115 Pemodelan dan Simulasi 2 7 TF8242 Instrumentasi Optik dan Laser 2<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
1
SEMESTER I<br />
SEMESTER II<br />
Courses<br />
Credit<br />
Hours<br />
Courses<br />
Credit<br />
Hours<br />
MA6173 Advanced<br />
2 TF6212 Optimization<br />
2<br />
Mathematics<br />
Technique<br />
TF6111 Physics of<br />
2 TF6214 Stochastic Process 2<br />
Instrumentation<br />
TF6113 Measurement<br />
3 TF6216 Instrumentation 3<br />
Systems<br />
Systems<br />
TF6115 Linear Systems 3 TF6218 Automatic Control 3<br />
Theory<br />
TF8111 Method and<br />
2<br />
Management of<br />
Research<br />
Total Credit Units 12 Total Credit Units 10<br />
SEMESTER III<br />
Courses<br />
Credit<br />
Hours<br />
SEMESTER IV<br />
Courses<br />
Credit<br />
Hours<br />
Elective<br />
Selected Courses 8<br />
TF7011 Research I 2 TF7012 Research II 4<br />
Total Credit Units 10 Total Credit Units 4<br />
Courses<br />
Courses<br />
List of Elective I & III<br />
List of Elective II & IV<br />
TF7111 Optimal Control 2 TF7210 Ultrasonic<br />
2<br />
Instrumentation<br />
TF7113 Adaptive Control 2 TF7212 Expert Systems 2<br />
TF7115 Artificial Intelligent 2 TF7214 Nonlinear Control 2<br />
Systems<br />
TF7117 Process Control 2 TF7216 Online & Real Time 2<br />
Systems<br />
TF7119 Medical<br />
2 TF7218 System Identification 2<br />
Instrumentations<br />
TF8113 Advanced Signal 2 TF8212 Estimation and 2<br />
Processing<br />
Filtering<br />
TF8115 Modeling and<br />
Simulation<br />
2 TF8214 Optical Instr. and<br />
Laser<br />
2<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
2
I.1. TF5111 Kontrol Optimal<br />
Kode<br />
Kuliah<br />
TF5111<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Optimal Kontrol<br />
Control Optimal<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pengenalan, pendekatan Lyapunov, Hamilton-Jacobi dan<br />
Minimum Principle, pendekatan peletakan akar (pole-placement),<br />
pemrograman dinamik, pengontrol optimal waktu diskrit,<br />
estimasi variabel keadaan optimum, pengontrol optimal dengan<br />
sistem persamaan polynomial, kontrol tegar<br />
References<br />
Acuan<br />
Introduction, Lyapunov approach, Hamilton-Jacobi and<br />
Minimum Principle, pole placement approach, dynamic<br />
<strong>program</strong>ming, discrete-time optimal controller, optimum state<br />
estimation, optimal controller of polynomial systems of equation,<br />
robust control<br />
1. Frank L. Lewis and Vassilis L. Syrmos, Optimal Control,<br />
John Wiley and Sons, Inc., 1995.<br />
2. Michael J. Grimble and Michael A. Johnson, Optimal<br />
Control and Stochastic Estimation : Theory and Aplications,<br />
Volume I, John Wiley & Sons, 1988<br />
3. Brian D.O. Anderson and John B. Moore, Optimal Control:<br />
Linear Quadratic Methods, Prentice-Hall, Inc., 1989.<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
3
I.2. TF5113 Kontrol Proses<br />
Kode<br />
Kuliah<br />
TF5113<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Kontrol Proses<br />
Process Control<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Membahas konsep sistem kontrol proses, representasi dan<br />
pemodelan sistem-sistem fisis dengan model matematik dan<br />
hukum-hukum dasar, perancangan sistem kontrol proses dengan<br />
metoda kontrol konvensional, strategi kontrol proses lanjut,<br />
model-based predictive control, plant-wide control, representasi<br />
proses multivariabel, interaksi proses multivariabel, pengontrolan<br />
proses multivariabel, studi kasus penerapan sistem kontrol proses<br />
di industri<br />
References<br />
Acuan<br />
Introduction, physical systems modelling and representation<br />
using mathematical model and basic laws, design of process<br />
control system using conventional control strategies, advanced<br />
process control, model-based predictive control, plant-wide<br />
control, multivariable process representation, interaction in<br />
multivariable process, case studies<br />
1. William L. Luyben, Process Modelling, Simulation and<br />
Control for Chemical Engineers, 2nd. ed. McGraw-Hill,<br />
1990<br />
2. F.G. Shinskey, Process Control Systems : Application,<br />
Design and Tuning, McGraw-Hill, 1986.<br />
3. George Stephanopoulos, Chemical Process Control : An<br />
Introduction to Theory and Practice, Prentice Hall, 1984<br />
4. Morari, M and E. Zafiriou, Robust Process Control, Prentice-<br />
Hall, Inc., 1989<br />
5. Marlin, T.E., Process Control : Design Processes and<br />
Control Systems for Dynamic Performance, McGraw-Hill,<br />
1995<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
4
I.3. TF5115 Instrumentasi Medik<br />
.Kode<br />
Kuliah<br />
TF5115<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Instrumentasi Medik<br />
Medical Instrumentation<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Konsep dasar <strong>instrumentasi</strong> medik, sensor dasar dan prinsipnya,<br />
amplifier dan pengolahan sinyal, sumber biopotensial, elektroda<br />
biopotensial, amplifier biopotensial, tekanan darah dan suara,<br />
pengukuran aliran darah dan volume darah, pengukuran pada<br />
sistem pernafasan, biosensor kimiawi, <strong>instrumentasi</strong><br />
laboratorium klinik, sistem imaging medik, perangkat terapi dan<br />
prostetik, safety elektrik.<br />
References<br />
Acuan<br />
Basic principles of medical instrumentation, sensor and its<br />
principles, amplifier and signal processing; biopotential,<br />
electrode of biopotensial, amplifier of biopotential, blood and<br />
sound pressure, blood flow and volume measurement,<br />
measurement on respiratory system, chemical biosensor,<br />
instrumentation of clinical laboratorium, medical imaging<br />
system, theurapeutic and prostetic devices, electrical safety<br />
1. Webster (editor), Medical Instrumentation, Application and<br />
Design, Houghton Mifflin, 2 nd edition, 1992<br />
2. Cromwell Leslie, Weibel J. Fred, Pfeiffer A. Erich,<br />
Biomedical Instrumentation and Measurements, Prentice<br />
Hall, 2 nd edition, 1980<br />
3. Metin Akay, Biomedical signal Processing, Academic Press,<br />
1994<br />
4. Hudson L. Donna, Cohen E. Maurice, Neural Networks and<br />
Artificial Intelligence for Biomedical Engineering, Prentice<br />
Hall, 2001<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
5
I.4. TF5212 Sistem Pakar<br />
Kode<br />
Kuliah<br />
TF5212<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester:<br />
2/4<br />
Kuliah<br />
Matakuliah Keahlian<br />
Sistem Pakar<br />
Expert Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pengantar inteligensia buatan dan sistem pakar; Pelacakan : teori<br />
graph, pelacakan exhaustive, pelacakan heuristic; Representasi<br />
pengetahuan : logika, aturan, pohon keputusan, jaringan<br />
semantik, frame dan objek, case-based reasoning; Manajemen<br />
ketidakpastian : persoalan ketidakpastian, pendekatan Bayes,<br />
faktor ketidakpastian; Rekayasa pengetahuan : siklus hidup,<br />
spesifikasi kebutuhan, akuisisi pengetahuan & verifikasi dan<br />
validasi; Pemrograman dan pembuatan prototipe sistem pakar<br />
References<br />
Acuan<br />
Introduction to artificial intelligence and expert systems; Search<br />
problem : graph theory, exhaustive search, heuristic search;<br />
Knowledge representation : logic, rules, decision tree, semantics<br />
network, frame and object, based reasoning; Management of<br />
uncertainty : uncertainty problem, Bayes approach, uncertainty<br />
factor; Knowlegde engineering : life cycle, specification of<br />
requirements, knowledge acquisition, verification and validation;<br />
Programming and prototype design of expert system<br />
1. Mike van Horn, Understanding Expert System, Bantam<br />
Book, 1986<br />
2. David W.Rolston, Principle of Artificial Intelligence and<br />
Expert System Development, ESL Inc.<br />
3. Louis E. Frenzel Jr., Crash Course in Artificial Intelligence<br />
and Expert System”, Howard W.Sams & Co.,1986<br />
4. Robert J. Schallkoff, Artificial Intelligence : An Engineering<br />
Approach, McGraw-Hill, 1990<br />
5. Elaine Rich and Kevin Knight, Artificial Intelligence,<br />
McGraw-Hill, 1991<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
6
I.5. TF5214 Identifikasi Sistem<br />
Kode<br />
Kuliah<br />
TF5214<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah keahlian<br />
Identifikasi Sistem<br />
Systems Identification<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Membahas konsep identifikasi sistem, penurunan model<br />
matematik secara teoritis dan eksperimental, masalah-masalah<br />
pada proses identifikasi suatu sistem, klasifikasi metoda<br />
identifikasi, metoda parametrik dan nonparametrik, identifikasi<br />
sistem multivariabel, contoh aplikasi, model matematik sistem<br />
dinamika dalam waktu kontinu dan diskrit, regresi linier,<br />
konvergensi dan konsistensi, metoda kuadrat terkecil, metoda<br />
rekursif (RLS), beberapa sifat estimator RLS, estimasi sistem<br />
dengan parameter yang berubah, validasi model dan estimasi<br />
struktur, identifikasi sistem lup tertutup, aspek-aspek praktis<br />
dalam identifikasi sistem<br />
References<br />
Acuan<br />
Introduction to systems identification, theortical and<br />
experimental based mathematical modelling, problems in system<br />
identification, classification of identification methods,<br />
parametrics and non-parametrics methods, multivariable system<br />
identification, application examples, mathematical model of<br />
dynamic systems in continous and discrete-time, linear<br />
regression, convergence and consistency, least-square method,<br />
recursive least-square (RLS), characteristics of RLS estimator,<br />
parameter estimation of time-variant systems, model validation<br />
and structure estimation, closed-loop identification, practical<br />
aspects in systems identification<br />
1. L. Ljung and T. Soderstrom, Theory and Practice of<br />
Recursive Identification, MIT Press, 1983<br />
2. L. Ljung, System Identification: Theory for the User,<br />
Prentice-Hall Inc., 1987.<br />
3. I.D. Landau, System Identification and Control Design,<br />
Prentice-Hall Inc., 1990<br />
4. G.E.P. Box and G.M. Jenkins, Time Series Analysis:<br />
Forecasting and Control, Revised Edition, Holden-Day, Inc.,<br />
1976<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
7
I.6. TF6111 Fisika Instrumentasi<br />
Kode<br />
Kuliah<br />
TF6111<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 1<br />
Kuliah<br />
MK Dasar Engineering<br />
Fisika Instrumentasi<br />
Physics of Instrumentation<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Atom dan tingkat energi, absorpsi dan emisi, pembangkit sinar<br />
laser. Efek Zeeman, resonansi magnetic inti dan penggunaanya.<br />
Pita energi semi konduktor, foto dioda, light emitting diode, laser<br />
dioda. Perambatan gelombang elektromagnetik, pandu<br />
gelombang. Gelombang elastik dalam bahan padat, cair, gas dan<br />
kaitannya dengan pengukuran.<br />
References<br />
Acuan<br />
Atom and energy level, absorption and emission, laser beam<br />
generator. Zeeman effect, core magnetic resonance and its<br />
application. Energy band of semiconductor, photodiode, light<br />
emitting diode, laser diode. Electromagnetic wave propagation,<br />
wave guide. Elastic wave in solid, fluid, gas and its relation with<br />
measurement.<br />
1. Arthur Beiser, Concepts of Modern Physics, 4 th edition,<br />
McGraw-Hill International, 1987<br />
2. Wildon and J.F.B. Hawkes, Optoelectronics : An<br />
Introduction, Prentice-Hall,1983<br />
3. William C. Elmore dan Mar.A. Heald, Physics of Waves,<br />
DoverPubl., 1985<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
8
I.7. TF6113 Sistem Pengukuran<br />
Kode<br />
Kuliah<br />
TF6113<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
3 SKS<br />
Semester: 1<br />
Kuliah<br />
MK Dasar Engineering<br />
Sistem Pengukuran<br />
Measurement Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Respons umum instrumen terhadap input periodik. Respons<br />
umum instrumen terhadap input transien. Spektrum frekuensi<br />
pada sinyal modulasi amplituda. Karakteristik sinyal random.<br />
Persyaratan fungsi transfer instrumen untuk hasil pengukuran<br />
yang akurat. Koreksi numerik untuk data dinamik. Instrumen<br />
Ukur: Seismic-pickup, accelerometer, jerk pick-up, sensor<br />
displacement dan kecepatan sudut gyroscopic, pengukuran gaya<br />
dan torsi gyroscopic, dinamika microphone, hotwire anemometer<br />
untuk pengukuran harga rata2 dan fluktuasi kecepatan aliran, alat<br />
ukur temperatur gas yang sangat tinggi, alat ukur temperatur<br />
dengan metoda radiasi. Masalah pada pengukuran temperatur<br />
aliran fluida. Intelijen sensor.<br />
References<br />
Acuan<br />
Response of instruments to periodic and transient inputs.<br />
Spectrum frequency of amplitude modulated signal. Random<br />
signal characteristics. Requirements of transfer function of an<br />
instrument for accurate measurement. Numerical correction for<br />
dynamic data. Measuring instruments : seismic-pickup,<br />
accelerometer, jerk pick-up, sensor displacement and angle<br />
displacement, gyroscopic angle velocity, force measurement and<br />
gyroscopic torque, dynamic of microphone, hotwire anemometer<br />
for average value measurement and flow velocity fluctuation,<br />
measuring device for very high temperature, temperature<br />
measurement based-on radiation method. Problems in<br />
temperature measurement of fluid flow. Intelligent sensors<br />
1. Ernest O. Doebelin, Measuring Systems : Design and<br />
Application, McGraw-Hill Book Co., 1990<br />
2. Ryoji Ohiba (editor), Intelligent Sensor Technology, John<br />
Wiley & Sons, 1992<br />
3. Bentley J.P., Principle of Measurement Systems, Longman<br />
Group Limited, 3 rd edition, 1985<br />
4. Yamasaki H. (editor), Handbook of Sensors and Actuators,<br />
Intelligent Sensors, vol. 3, Elsevier, 1996<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
9
I.8. TF6115 Sistem Linier<br />
Kode<br />
Kuliah<br />
TF6115<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
3 SKS<br />
Semester: 1<br />
Kuliah<br />
MK Dasar Engineering<br />
Sistem Linier<br />
Linear Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Konsep sistem linier; fungsi-fungsi singular, fungsi delta dengan<br />
argumen fungsi lain, hubungan input-output, konsep linieritas,<br />
kausalitas, relaxedness, stasionaritas, dekomposisi signal dalam<br />
fungsi-fungsi singular, respons sistem dengan integral konvolusi,<br />
evaluasi integral konvolusi, fungsi sistem dan representasi<br />
domain frekuensi, konvolusi diskrit dan transformasi Z, analisis<br />
persamaan ruang keadaan, pemodelan sistem linier menggunakan<br />
representasi ruang keadaan, bentuk-bentuk kanonik, diagonal dan<br />
Jordan, solusi persamaan ruang keadaan, transformasi, konsep<br />
keterkontrolan dan keteramatan, analisis sistem umpan balik<br />
variabel keadaan linier<br />
References<br />
Acuan<br />
Introduction, singular functions, delta function with other<br />
functions argument, input-output relation, linearity concepts,<br />
causality, relaxedness, stationarity, signal decomposition in<br />
singular functions, system response using convolution integral,<br />
evaluation of convolution integral, system function and frequency<br />
domain representation, discrete convolution amd z-<br />
transformation, state-space analysis, modelling of linear system<br />
using state-space representation, canonical forms, diagonal and<br />
Jordan forms, solution of state-space equation, transformation,<br />
controllability and observability, analysis of linear state variable<br />
feedback<br />
1. Gabel R.A. and Roberts R.A., Signal and Linier Systems,<br />
John Wiley & Sons, 1995.<br />
2. Michael O Flynn and Eugene Moriarty, Linear Systems: Time<br />
Domain and Transform Analysis, John Wiley & Sons, 1987.<br />
3. Thomas Kailath, Linear Systems, Prentice-Hall Inc., 1980<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
10
I.9. TF6212 Teknik Optimasi<br />
Kode<br />
Kuliah<br />
TF 6212<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 2<br />
Kuliah<br />
MK Dasar Engineering<br />
Teknik Optimasi<br />
Optimization Technique<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Pendahuluan : tinjauan umum optimasi, perumusan fungsi<br />
obyektif, klasifikasi persoalan optimasi; Teknik Optimasi Klasik<br />
: analisis titik ektsremum, optimasi single variable, optimasi<br />
multivariabel tanpa kendala, optimasi multivariabel dengan<br />
kendala; Pemrograman Linier; Pemrograman Non-linear;<br />
Pemrograman Geometrik; Pemrograman Dinamik; Pemrograman<br />
Integer.<br />
References<br />
Acuan<br />
Introduction: general objectives of optimization, objective<br />
function formulation, classification of optimization problems.<br />
Classical optimization techniques : extremum point analysis,<br />
single-variable optimization, multivariable optimization with and<br />
without constraints. Linear <strong>program</strong>ming. Dynamic<br />
<strong>program</strong>ming. Integer <strong>program</strong>ming. Introduction to nonlinear<br />
and stochastic <strong>program</strong>ming.<br />
Jasbir S.Arora, Introduction to Optimum Design, McGraw-Hill,<br />
Inc.,1989<br />
1. S.S.Rao, Optimization : Theory and Application, 2 nd edition,<br />
Wiley Eastern Ltd.,1984<br />
2. Edgar and D.M. Himmelblau, Optimization of Chemical<br />
Processes, McGraw-Hill, Inc.,1989<br />
3. Saul I.Gass, Linear Programming,5 th edition,McGraww-<br />
Hill,Inc.,1985<br />
4. Alpha C. Chang, Elements of Dynamic Optimization,<br />
McGraw-Hill, Inc.,1992<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
11
I.10. TF6214 Proses Stokastik<br />
Kode<br />
Kuliah<br />
TF6214<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 2<br />
Kuliah<br />
MK Dasar Engineering<br />
Proses Stokastik<br />
Stochastic Process<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Arti probabilitas, aksioma probabilitas, ruang probabilitas,<br />
probabilitas bersyarat, Bernoulli trials, teorema asimptotis, fungsi<br />
dan variabel acak, fungsi karakteristik, variabel acak dua<br />
dimensi, estimasi kuadrat rata-rata, proses stasioner, sistem<br />
dengan masukan stokastik, spektrum daya, ergodicity, estimasi<br />
spektral, korelasi.<br />
References<br />
Acuan<br />
Probability theory, probability axiom, probability space,<br />
probability with constraint, Bernoulli trials, asymptotic theorem,<br />
random variable and function, characteristics function, two<br />
dimensional random variable, least-square estimation, stationary<br />
process, system with stochastic input, power spectrum,<br />
ergodicity, spectral estimation, correlation<br />
1. Papoulis A., Probability, Random Variables, and Stohastic<br />
Processes, 3 rd Edition, McGraw-Hill, 1991.<br />
2. Gardner, W.A, Introduction to Random Processes: With<br />
Application to Signals and Systems, Macmillan Pub. Co.,<br />
1986<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
12
I.11. TF6216 Sistem Instrumentasi<br />
Kode<br />
Kuliah<br />
TF6216<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
3 SKS<br />
Semester: 2<br />
Kuliah<br />
Matakuliah Keahlian<br />
Sistem Instrumentasi<br />
Instrumentation Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Lingkup sistem <strong>instrumentasi</strong>. Karakteristik sistem <strong>instrumentasi</strong><br />
yang tergantung pada karakteristik masing2 komponen, seperti<br />
sistem proses, sistem pengukuran, sistem kontrol, aktuator, dsb.<br />
Sistem kontrol terdistribusi (DCS). Instrumentasi pada berbagai<br />
industri. Instrumentasi pada sistem robot, sistem deteksi posisi<br />
target, sistem intelijen building, sistem pesawat udara.<br />
Instrumentasi intelijen: deteksi kesalahan sensor (perangkat lain),<br />
sistem redundansi. Reliability pada sistem <strong>instrumentasi</strong>: definisi<br />
notasi pada relibility sistem, sistem paralel dan serial, reliabilty<br />
pada sistem tanpa perbaikan dan sistem yang dapat diperbaiki,<br />
perhitungan reliability sistem <strong>instrumentasi</strong> dengan metoda<br />
pohon kesalahan dan metoda Markov.<br />
References<br />
Acuan<br />
Scope of instrumentation system. Characteristics of<br />
instrumentation system which depend on each components, i.e.<br />
process, measurement system, control system, actuator, etc..<br />
Distributed Control System (DCS). Industrial instrumentation.<br />
Instrumentation in robotics, detection of targeted position,<br />
intelligent building, aeroplane, etc.. Intelligent instrumentation :<br />
detection of sensor error (other devices), redundancy system.<br />
Reliability in instrumentation system : definition, parallel and<br />
serial system, realibility for system repairable and unrepairable,<br />
reliability calculation of instrumentation system using error tree<br />
and Markov method<br />
Tasuku Senbon, Futoshi Hanabuchi, Instrumentation Systems,<br />
Fundamental & Application, Springer-Verlag, 1991<br />
1. Yamasaki H. (editor), Handbook of Sensors and Actuators,<br />
Intelligent Sensors, vol. 3, Elsevier, 1996<br />
2. Kececioglu Dimitri, Reliability Engineering Handbook,<br />
Volume 1 and 2, PTR Prentice Hall, 1991<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
13
I.12. TF6218 Teori Kontrol Automatik<br />
Kode<br />
Kuliah<br />
TF6218<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
3 SKS<br />
Semester: 2<br />
Kuliah<br />
Matakuliah Keahlian<br />
Teori Kontrol Automatik<br />
Automatic Control Theory<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Pengantar; Pemodelan sistem-sistem Fisis; Unjuk kerja dan<br />
analisis sistem, Aksi pengontrol PID dan analisis kesalahan;<br />
Stabilitas sistem kontrol, Metoda root-locus dan respons<br />
frekuensi; Pemodelan sistem dengan menggunakan metoda ruang<br />
keadaan, Konsep keterkontrolan dan keteramatan, Pengontrol<br />
umpan balik variabel keadaan; Penggunaan observer sebagai<br />
estimator variabel keadaan; Estimasi dan pemfilteran optimal;<br />
Kontrol optimal linier stokastik; Studi kasus penerapan kontrol<br />
automatik<br />
References<br />
Acuan<br />
Introduction; Physical system modelling; Performance and<br />
system analysis; PID controller action and error analysis;<br />
Stability of control system; Root-locus method and frequency<br />
response; System modelling using state-space representation;<br />
Controllability and observability; State-variable feedback;<br />
Estimation and optimal filtering; Linear stochastic optimal<br />
control; Case studies<br />
1. Ogata, K., Modern Control Engineering, Prentice-Hall Inc.,<br />
Englewood Cliffs, New Jersey, 1997<br />
2. Kuo, B.C., Automatic Control Systems, Prentice-Hall Inc.,<br />
Englewood Cliffs, New Jersey, 1997<br />
3. Friedland, B., Control System Design - An Introduction to<br />
State-Space Methods, McGraw-Hill, New York, 1986<br />
4. Lewis, F.L., Optimal Control, John Wiley and Sons Inc.,<br />
New York, 1986<br />
5. Kwakernaak, H. and Sivan, R., Linear Optimal Control<br />
Systems, Wiley Interscience, New York, 1972<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
14
I.13. TF70Z1 Penelitian I<br />
Kode<br />
Kuliah<br />
TF70Z1<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester:<br />
2/3<br />
Tesis<br />
Matakuliah Keahlian<br />
Penelitian I<br />
Research I<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Pelaksanaan tahap awal tugas penelitian (Tesis) berdasarkan<br />
proposal penelitian yang telah disetujui pembimbing pada<br />
Semester I (Kuliah Metoda dan Manajemen Riset, TF8111).<br />
References<br />
Acuan<br />
Initial working of research project (thesis) based on research<br />
proposal which has been accepted by the supervisor at 1 st<br />
Semester (Course on Method and Management of Research,<br />
TF8111)<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
15
I.14. TF70Z2 Penelitian II<br />
Kode<br />
Kuliah<br />
TF70Z2<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
4 SKS<br />
Semester:<br />
3/4<br />
Tesis<br />
Matakuliah Keahlian<br />
Penelitian II<br />
Research II<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Wajib<br />
Lanjutan Penelitian I sampai dengan penyusunan laporan<br />
penelitian dan ujian hasil penelitian di depan tim penguji.<br />
References<br />
Acuan<br />
Continuation of Research I Course until the research report<br />
finalization and thesis presentation in the front of examinee.<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
16
I.15. TF7111 Kontrol Adaptif<br />
Kode<br />
Kuliah<br />
TF7111<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Kontrol Adaptif<br />
Adaptive Control<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pendahuluan: persoalan kontrol otomatik, struktur kontrol<br />
adaptif; Identifikasi Model Proses: struktur model, metoda<br />
kuadrat terkecil, identifikasi secara off-line dan rekursif; Model<br />
Reference Adaptive Control Systems; Self-tuning Regulator &<br />
Controller; Analisis Sistem Kontrol Adaptif; Kontrol Adaptif<br />
untuk Sistem Stokastik; Aspek-aspek dalam implementasi.<br />
References<br />
Acuan<br />
Introduction : problems of automatic control, structures in<br />
adaptive control; Identification of Process Model : model<br />
structure, least-square method, off-line and recursive<br />
identification; Model Reference Adaptive Control; Self-tuning<br />
Regulator and Controller; Analysis of Adaptive Control System;<br />
Adaptive Control for Stochastic Systems; Aspects in<br />
Implementation<br />
ID. Landau, Adaptive Control: The Model Reference Approach,<br />
Marcel Dekker, Inc., 1979<br />
1. KJ. Astrom and B. Witenmark, Adaptive Control, Addison-<br />
Wesley Pub Co., 1989<br />
2. KJ. Astrom and B. Wittenmark, Computer-Controlled<br />
Systems: Theory and Design, Prentice-Hall, Inc., 1990<br />
3. GC. Goodwin and KS. Sin, Adaptive Filtering, Prediction<br />
and Control, Prentice-Hall, Inc., 1984.<br />
4. Harijono A. Tjokronegoro, Kontrol Adaptif, Jurusan Teknik<br />
Fisika <strong>ITB</strong>, 1999<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
17
I.16. TF7113 Sistem Inteligensia Buatan<br />
Kode<br />
Kuliah<br />
TF7113<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Sistem Inteligensia Buatan<br />
Artificial Intelligence System<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pengertian inteligensia buatan, Bidang-bidang penelitian<br />
inteligensia buatan; Representasi pengetahuan : ekspresi logika,<br />
logika proposional dan kalkulus predikat, list dan struktur pohon,<br />
frame dan script, kaidah produksi; Teknik Pelacakan : teknik<br />
pelacakan trial and error, teknik pelacakan sistematis, teknik<br />
pelacakan vertikal dan horizontal, teknik pelacakan heuristik;<br />
Bahasa pemrograman prolog; Sistem pakar dan penggunaannya;<br />
Jaringan syaraf tiruan dan penggunaannya; Logika fuzzy dan<br />
penggunaannya.<br />
References<br />
Acuan<br />
Introduction, research areas of artificial intelligence; Knowledge<br />
representation ; logic expression, proportional logic and<br />
predicate calculus, list and tree structure, frame and script,<br />
production rules; Search Technique : search technique by trial<br />
and error, systematic search technique, vertical and horizontal<br />
search technique, heuristics search technique; Programming<br />
language Prolog; Expert Systems and ist application; Artificial<br />
Neural Network and its application; Fuzzy Logic and its<br />
application<br />
1. Rich and K. Knight, Artificial Intelligence, McGraw-Hill<br />
Book Co., 1991<br />
2. Kosko, Neural Networks and Fuzzy Systems, Prentice Hall,<br />
1992<br />
3. Frenzel Jr, L.E., Crash Course in Artifial Intelligence and<br />
Expert System, Howard W. Sams & Co., 1986<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
18
I.17. TF722A Instrumentasi Ultrasonik<br />
Kode<br />
Kuliah<br />
TF722A<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester:<br />
2/4<br />
Kuliah<br />
Matakuliah Keahlian<br />
Intrumentasi Ultrasonik<br />
Ultrasonic Instrumentation<br />
KBK/Bidang<br />
Keahlian:<br />
Fisika Bangunan dan<br />
Akustik<br />
Sifat:<br />
Pilihan<br />
Teori gelombang ultrasonik; Metoda-metoda pengukuran<br />
atenuasi dan kecepatan gelombang ultrasonik; Sistem dan<br />
perangkat pengukuran ultrasonik; Aplikasi ultrasonik di bidang<br />
<strong>instrumentasi</strong> dan kontrol; Pemrosesan sinyal ultrasonik.<br />
References<br />
Acuan<br />
Theory of utrasonic wave; Measurement methods of attenuation<br />
and speed of ultrasonic wave; Ultrasonic system and<br />
measurements devices; Ultrasonic application in the field of<br />
instrumentation and control; Ultrasonic signal processesing<br />
Kinsler, L.E., A.R. Frey, A.B. Coppens and J.V. Sanders,<br />
Fundamentals of Acoustics, John Wiley & Sons, Inc., New York,<br />
2000.<br />
Szilard, J., Ultrasonic Testing : Non-conventional Testing<br />
Techniques, John Wiley & Sons, New York, 1982.<br />
1. Charlesworth J.P. and Temple J.A.G., Engineering<br />
Applications of Ultrasonic Time-of-Flight Difraction, John<br />
Wiley & Sons Inc., New York, 1989.<br />
2. Fitting, D.W. and L. Adler; Ultrasonic Spectral Analysis for<br />
Non Destructive Evaluation, Plenum Press, New York, 1981.<br />
3. Lynnworth, L.C., Ultrasonic Flowmeter : Physical Acoustics,<br />
Vol. XIV, Academic Press, New York, 1979.<br />
4. Lynnworth, L.C., Industrial Application of Ultrasound :<br />
Measurements, Tests and Process Control Using Low<br />
Intensity Ultrasound, IEEE Transaction on Sonics and<br />
Ultrasound, Vol. SU-22, No. 2, March 1975.<br />
5. Berkhout, A.J., J. Ridder and L.F. van der Wal, Acoustical<br />
Imaging, Vol. 14, Plenum Press, New York, 1985.<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
19
I.18. TF7212 Sistem Kontrol Nonlinier<br />
Kode<br />
Kuliah<br />
TF7212<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester:<br />
2/4<br />
Kuliah<br />
Matakuliah Keahlian<br />
Sistem Kontrol Nonlinier<br />
Nonlinear Control Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pengantar, model non-linier, analisis energi sistem nonlinier,<br />
kestabilan sistem nonlinier, metode Liapunov, sistem pasif,<br />
pengontrolan sistem pasif, contoh kasus<br />
References<br />
Acuan<br />
Introduction; nonlinear model; energy analysis of nonlinear<br />
system; stability analysis of nonlinear system; Lyapunov method;<br />
passive system; control of passive system; case studies<br />
Hasan A. Khalil, Nonlinear Systems, 2 nd Eds., Prentice Hall,<br />
1996.<br />
1. Romeo Ortega, et al, Putting Energy Back in Control, IEEE<br />
Control System Magazine, April 2001.<br />
2. Mark Tucherman, The Hamiltonian Formulation of Classical<br />
Mechanics,<br />
www.nyu.edu/class/tucherman/stat.mech/lectures/lecture_1/n<br />
ode4, 2002.<br />
3. Mark Tucherman, The Lagrangian Formulation of Classical<br />
Mechanics,<br />
www.nyu.edu/class/tucherman/stat.mech/lectures/lecture_1/n<br />
ode3, 2002.<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
20
I.19. TF7214 Sistem Online dan Real-time<br />
Kode<br />
Kuliah<br />
TF7214<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Sistem Online dan Real-time<br />
Online and Real-time Systems<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pengantar : konsep perancangan dan struktur pengembangan<br />
sistem kontrol waktu nyata; konfigurasi sistem kontrol<br />
berkomputer; perangkat keras untuk sistem kontrol waktu nyata;<br />
sistem kontrol digital langsung; sistem kontrol supervisory,<br />
terpusat, terdistribusi dan sekuensial; <strong>program</strong>mable logic<br />
controller; sistem operasi dan pemrograman waktu nyata;<br />
pemrograman konkuren, multi<strong>program</strong>ming dan multitasking<br />
aspek operasi waktu nyata; bahasa waktu nyata; sistem<br />
komunikasi; konfigurasi dan protokol komunikasi; local area<br />
network; man-machine interface; contoh-contoh kasus<br />
References<br />
Acuan<br />
Introduction : design concepts and development structure of<br />
real-time control system; computer controlled system<br />
configuration; hardware for real-time control; direct digital<br />
control system; supervisory, centralized, distributed and<br />
sequential control system; <strong>program</strong>mable logic controller;<br />
operating system and real-time <strong>program</strong>ming; concurrent<br />
<strong>program</strong>ming; multi<strong>program</strong>ming and multitasking; real-time<br />
language; communication system; configuration and<br />
communication protocol; local area network; man-machine<br />
interface; case studies<br />
1. Bennet S., Real-time Computer Control : An Introduction,<br />
Prentice-Hall Inc , 1988<br />
2. Olsson G. dan Piani G., Computer Systems for Automation and<br />
Control, Prentice-Hall Inc., 1992.<br />
3. Astrom K.J. and Wittenmark B., Computer Controlled Systems<br />
: Theory and Design, Prentice-Hall Inc., 1990<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
21
I.20. TF8111 Metoda dan Manajemen Riset<br />
Kode<br />
Kuliah<br />
TF8111<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 1<br />
Kuliah<br />
MK Dasar Engineering<br />
Metoda dan Manajemen Riset<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Method and Management of Research<br />
Sifat:<br />
Wajib<br />
Teknik menyusun proposal penelitian, teknik menulis laporan<br />
penelitian, teknik presentasi laporan penelitian, kode etika<br />
peneliti dan penelitian<br />
References<br />
Acuan<br />
Techniques in research proposal preparation; techniques in<br />
research report writing; techniques in research report<br />
presentation; researchers and research code of ethics<br />
1. Pedoman Format Penulisan Disertasi, Institut Teknologi<br />
Bandung, Pedoman Pascasarjana, 1998<br />
2. Pedoman Singkat Penyusunan Usulan Penelitian, Institut<br />
Teknologi Bandung, Program Pascasarjana, 1997<br />
3. Mike W.Martin, Roland Schinzinger, Ethics in Engineering,<br />
McGraw-Hill Co.,1996<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
22
I.21. TF8113 Pemrosesan Sinyal Lanjut<br />
Kode<br />
Kuliah<br />
TF8113<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Pemrosesan Sinyal Lanjut<br />
Advanced Signal Processing<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Sinyal acak, konsep estimasi (MSE, MAP, MLE), estimasi<br />
spektral nonparametrik; pemodelan sinyal (AR, MA, ARMA),<br />
ruang keadaan, estimasi spektral parametrik, estimasi keadaan<br />
(Kalman Filter, Wiener Filter), konsep pemrosesan sinyal<br />
adaptif, estimasi parameter sinyal, estimasi spektral adaptif,<br />
adaptive noise rejection (adaptive noise canceling)<br />
References<br />
Acuan<br />
Random signal, concept of estimation (MSE, MAP, MLE), nonparametric<br />
spectral estimation, signal modeling (AR, MA,<br />
ARMA), state-space, parametric spectral estimation, state<br />
estimation (Kalman Filter, Wiener Filter), concept of adaptive<br />
signal processing, signal parameter estimation, adaptive spectral<br />
estimation, adaptive noise rejection (adaptive noise canceling)<br />
1. J.V.Candy, Signal Processing- The Modern Approach,<br />
McGraw-Hill Book Co., 1988<br />
2. S.J.Orfanidis, Optimum Signal Processing, Prentice-<br />
Hall,Inc., 1988<br />
3. Harijono A.Tjokronegoro, Pengolahan Sinyal, Catatan<br />
Kuliah, Jurusan Teknik Fisika <strong>ITB</strong>,1999<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
23
I.22. TF8115 Pemodelan dan Simulasi<br />
Kode<br />
Kuliah<br />
TF8115<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
Kuliah<br />
Matakuliah Keahlian<br />
Pemodelan dan Simulasi<br />
Modeling and Simulation<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Dasar pemodelan dan simulasi. Macam model matematis system<br />
: diskrit dan kontinu. Pemodelan dan simulasi sistem diskrit :<br />
sistem antrean, pemilihan distribusi probabilitas, generator<br />
random number, analisis data untuk sistem tunggal, studi kasus.<br />
Pemodelan dan simulasi sistem kontinu : representasi matematis<br />
untuk sistem fisika kontinu, model matematis sistem enjinering<br />
kimiawi, simulasi komputer, identifikasi proses. Formulasi<br />
persamaan keadaan diskrit dari persamaan keadaan kontinu,<br />
integrator diskrit sebagai elemen transfer. Metoda operasional<br />
untuk mensimulasikan sistem linier stasioner. Aplikasi metoda<br />
operasional pada sistem nonlinier dan sistem yang time varying.<br />
Basic modeling and simulation. Mathematical model of system :<br />
discrete and continous. Modeling and simulation of discrete<br />
systems : queuing system, probability distribution, random<br />
number generatir, data analysis for single systems, case studies.<br />
Modeling and simulation of continous syetms : mathematical<br />
representation of continous physical systems, mathematical<br />
model of chemical systems; computer simulation, process<br />
identification. Formulation of discrete-time equation from<br />
continous time equation, discrete-time integrator as transfer<br />
element. Operational method for simulation stationary linear<br />
system. Application of operational method to the nonlinear<br />
system and time-varying systems<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
24
eferences<br />
Acuan<br />
1. Joseph S. Rosko, Digital Simulation of Physical Systems,<br />
Addison Wesley Publ .Co., 1972.<br />
2. Jon M. Smith, Mathematical Modeling and Digital<br />
Simulation for Engineers and Scientists, John Wiley & Sons,<br />
1976.<br />
3. Law A.M., Kelton D.W., Simulation Modeling and Analysis,<br />
2 nd edition, McGraw-Hill International Edition, 1991<br />
4. Lowen Shearer, Arthur T. Murphy and Herbert H.<br />
Richardson, Introduction to System Dynamics, Addison-<br />
Wesley Pub. Co., 1971.<br />
5. Law A.M. & Hilton W.D. Simulation, Modelling & Analysis,<br />
McGraw-Hill International Edition<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
25
I.23. TF8212 Estimasi dan Pemfilteran<br />
Kode<br />
Kuliah<br />
TF8212<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 4<br />
Kuliah<br />
Matakuliah Keahlian<br />
Estimasi dan Pemfilteran<br />
Estimation and Filtering<br />
KBK/Bidang<br />
Keahlian:<br />
Instrumentasi dan<br />
Kontrol<br />
Sifat:<br />
Pilihan<br />
Pendahuluan : model linier; estimasi Kuadrat Terkecil; best<br />
linear unbiased estimation, maximum likelihood estimation;<br />
maximum a-posteriori estimation; estimasi keadaan : prediction,<br />
filtering (Kalman Filter), smoothing.<br />
References<br />
Acuan<br />
Introduction : linear model; Least Square estimation; best linear<br />
unbiased estimation, maximum likelihood estimation; maximum<br />
a-posteriori estimation; state estimation: prediction, filtering<br />
(Kalman Filter), smoothing<br />
BDO. Anderson and JB. Moore, Optimal Filtering, Prentice-<br />
Hall, Inc., 1979<br />
1. Peter S. Maybeck, Stochastics Models, Estimation, and<br />
Control, Academic Press, 1979<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
26
I.24. TF8242 Instrumentasi Optik dan Laser<br />
Kode<br />
Kuliah<br />
TF8242<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 3<br />
KBK/Bidang<br />
Keahlian:<br />
Optik<br />
Kuliah<br />
Matakuliah Keahlian<br />
Instrumentasi Optik dan Laser<br />
Optical Instrumentation and Laser<br />
Sifat:<br />
Pilihan<br />
Film fotografi: karakteristik film, kegunaan film; Aplikasi sinar<br />
laser : sifat sinar laser, pemanfaatan sifat terarah, perambatan<br />
melalui distribusi indeks bias, giroskop laser; Holografi :<br />
pembentukan hologram, jenis-jenis hologram, holografi<br />
interferometri, pembentukan kontur obyek; Sensor serat optik :<br />
prinsip serat optik, sensor extrinsik, sensor intrinsik, giroskop<br />
serat optik.<br />
References<br />
Acuan<br />
Photography film : film characteristics, the use of film; Laser<br />
beam application; characteristics of laser beam, coherency<br />
characteristics, propragation through bias index distribution,<br />
laser gyroscope; Holography : hologram forming, type of<br />
hologram, interferometry holography, forming contour of an<br />
object; Fiber optics sensor : principles, extrinsic and intrinsic<br />
sensors, fiber optics gyroscope<br />
1. Yu dan I.C. Khoo, Principles of Optical Engineering, John<br />
Wiley & Sons, Singapore (1990)<br />
2. Lizuka, Engineering Optics, Springer-Verlag, Berlin (1987)<br />
3. Krohn, Fiber Optic Sensors, Instrument Society of America,<br />
Triangle Park (1988)<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
27
I.25. MA6173 Matematika Lanjut<br />
Kode<br />
Kuliah<br />
MA6173<br />
Sifat kuliah<br />
Kelompok Kuliah<br />
Course Title<br />
(Indonesian)<br />
Nama Matakuliah<br />
Course Title<br />
(English)<br />
Nama Matakuliah<br />
Short Description<br />
Silabus ringkas<br />
Kredit :<br />
2 SKS<br />
Semester: 1<br />
Kuliah<br />
MK Dasar Science<br />
Matematika Lanjut<br />
Advanced Mathematics<br />
KBK/Bidang<br />
Keahlian:<br />
Umum<br />
Sifat:<br />
Wajib<br />
Keilmuan kontrol atau kendali seringkali memodelkan sistem<br />
dalam bentuk sistem dinamik yang dinyatakan dalam sebuah<br />
sistem persamaan diferensial. Dengan dasar ini, kami<br />
berpendirian bahwa peserta <strong>program</strong> <strong>magister</strong> yang menggeluti<br />
bidang kontrol sudah selayaknya memahami dasar-dasar sistem<br />
persamaan diferensial. Pada saat yang sama, kami sadar bahwa<br />
pemahaman dalam sistem persamaan diferensial perlu didukung<br />
beberapa dasar matematika seperti aljabar linear dan kalkulus<br />
vektor. Oleh karenanya, dalam kuliah ini, peserta diharapkan<br />
mampu mengembangkan pemahamannya pada dasar-dasar<br />
matematika lanjut di atas serta mengaitkan pemahaman tersebut<br />
pada sistem kontrol. Khususnya, peserta dapat membekali<br />
dirinya dalam pengetahuan serta ketrampilan yang berkaitan<br />
dengan solusi sistem persamaan diferensial linear.<br />
References<br />
Acuan<br />
The knowledge of control often needs to model the system in the<br />
form of dynamical system represented in system of differential<br />
equation. Based on this, the students of the <strong>magister</strong> <strong>program</strong><br />
concentrating with the control subject have to understand the<br />
basic of system of differential equation. At the same time, the<br />
understanding on system of differential equation should be<br />
supported by some basic of mathematics such as linear algebra<br />
and vector of calculus. Therefore, in this subject, the students are<br />
expected to develop their understanding on the above basics of<br />
advanced mathematics and relate the understanding with the<br />
control system. In particular, the students should enhance<br />
themselves with the knowledge and skills related with the<br />
solution of system of linear differential equation<br />
1. Perko, L., Differential Equations and Dynamical Systems,<br />
Text in Applied Mathematics, 7, Springer-Verlag<br />
Silabus S2 PINK<br />
Tahun 2003/2004<br />
28